
IDNav

Logo IDNav
Credit:
PR
[RGB-D Odometry] Information-Driven Direct RGB-D Odometry (A. Fontán, J. Civera, R. Triebel), IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2020. Paper  und BibTeX entry
und BibTeX entry
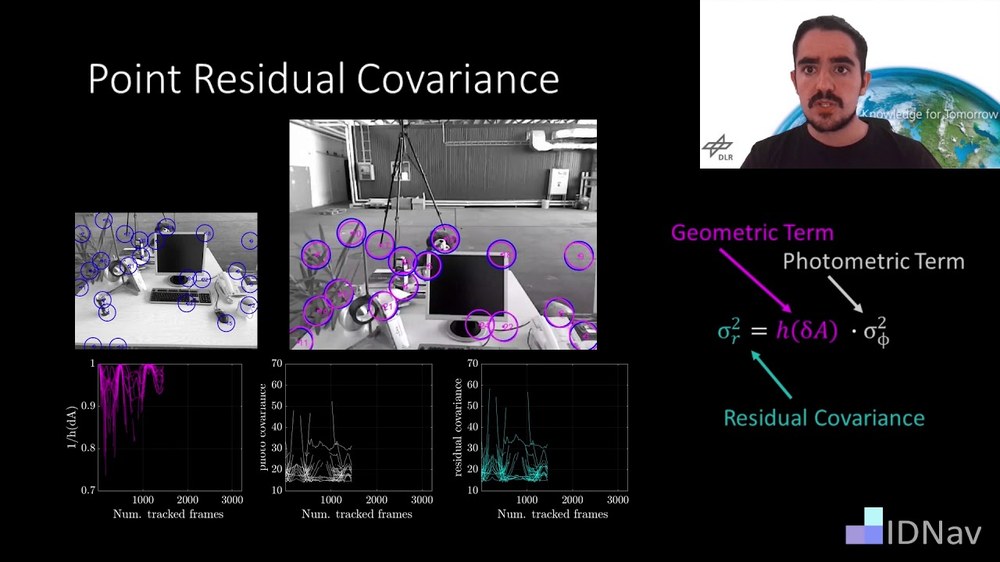
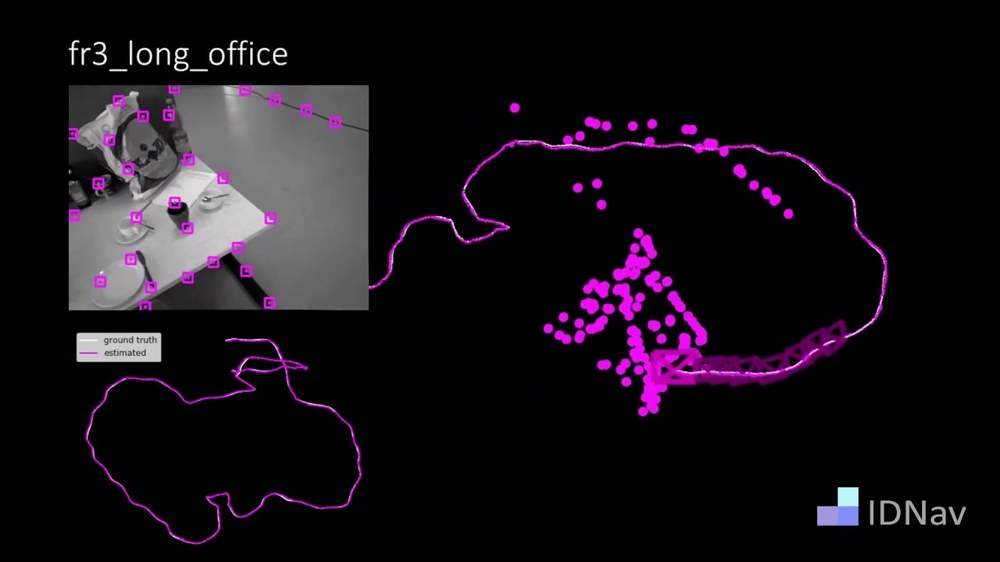
In diesem Beitrag wird ein informationstheoretischer Ansatz für die Punktauswahl bei der direkten RGB-D-Odometrie vorgestellt. Ziel ist es, nur die informativsten Messungen auszuwählen, um das Optimierungsproblem bei minimalen Auswirkungen auf die Genauigkeit zu reduzieren. In der visuellen Odometrie/SLAM ist es üblich, mehrere Hundert Punkte zu verfolgen und dabei eine Echtzeitleistung auf High-End-Desktop-PCs zu erzielen. Die Verringerung des Rechenaufwands wird die Implementierung von Odometrie und SLAM in Low-End-Plattformen wie kleinen Robotern und AR/VR-Brillen erleichtern. Unsere experimentellen Ergebnisse zeigen, dass unser neuartiges informationsbasiertes Auswahlkriterium es uns ermöglicht, die Anzahl der verfolgten Punkte um eine Größenordnung zu reduzieren (auf nur 24) und dabei eine Genauigkeit zu erreichen, die dem Stand der Technik entspricht (manchmal sogar übertrifft), während der Rechenaufwand um das Zehnfache reduziert wird.
Informationsgesteuerte direkte RGB-D-Odometrie
Informationsgesteuerte direkte RGB-D-Odometrie
In diesem Beitrag wird ein informationstheoretischer Ansatz für die Punktauswahl bei der direkten RGB-D-Odometrie vorgestellt. Ziel ist es, nur die informativsten Messungen auszuwählen, um das Optimierungsproblem bei minimalen Auswirkungen auf die Genauigkeit zu reduzieren. In der visuellen Odometrie/SLAM ist es üblich, mehrere Hundert Punkte zu verfolgen und dabei eine Echtzeitleistung auf High-End-Desktop-PCs zu erzielen. Die Verringerung des Rechenaufwands wird die Implementierung von Odometrie und SLAM in Low-End-Plattformen wie kleinen Robotern und AR/VR-Brillen erleichtern. Unsere experimentellen Ergebnisse zeigen, dass unser neuartiges informationsbasiertes Auswahlkriterium es uns ermöglicht, die Anzahl der verfolgten Punkte um eine Größenordnung zu reduzieren (auf nur 24) und dabei eine Genauigkeit zu erreichen, die dem Stand der Technik entspricht (manchmal sogar übertrifft), während der Rechenaufwand um das Zehnfache reduziert wird.
Credit:
In diesem Beitrag wird ein informationstheoretischer Ansatz zur Punktauswahl für die direkte RGB-D-Odometrie vorgestellt. Ziel ist es, nur die informativsten Messungen auszuwählen, um das Optimierungsproblem bei minimalen Auswirkungen auf die Genauigkeit zu reduzieren. In der visuellen Odometrie/SLAM ist es üblich, mehrere Hundert Punkte zu verfolgen und dabei eine Echtzeitleistung auf High-End-Desktop-PCs zu erzielen. Die Verringerung des Rechenaufwands wird die Implementierung von Odometrie und SLAM in Low-End-Plattformen wie kleinen Robotern und AR/VR-Brillen. Unsere experimentellen Ergebnisse zeigen, dass unser neuartiges informationsbasiertes Auswahlkriterium es uns ermöglicht, die Anzahl der verfolgten Punkte um eine Größenordnung zu reduzieren (auf nur 24) und dabei eine Genauigkeit zu erreichen, die dem Stand der Technik entspricht (manchmal sogar übertrifft) und gleichzeitig den Rechenaufwand um das 10-fache reduziert.
Informationsgesteuerte direkte RGB-D-Odometrie - CVPR 2020 (mündlich)
Informationsgesteuerte direkte RGB-D-Odometrie - CVPR 2020 (mündlich)
In diesem Beitrag wird ein informationstheoretischer Ansatz zur Punktauswahl für die direkte RGB-D-Odometrie vorgestellt. Ziel ist es, nur die informativsten Messungen auszuwählen, um das Optimierungsproblem bei minimalen Auswirkungen auf die Genauigkeit zu reduzieren. In der visuellen Odometrie/SLAM ist es üblich, mehrere Hundert Punkte zu verfolgen und dabei eine Echtzeitleistung auf High-End-Desktop-PCs zu erzielen. Die Verringerung des Rechenaufwands wird die Implementierung von Odometrie und SLAM in Low-End-Plattformen wie kleinen Robotern und AR/VR-Brillen. Unsere experimentellen Ergebnisse zeigen, dass unser neuartiges informationsbasiertes Auswahlkriterium es uns ermöglicht, die Anzahl der verfolgten Punkte um eine Größenordnung zu reduzieren (auf nur 24) und dabei eine Genauigkeit zu erreichen, die dem Stand der Technik entspricht (manchmal sogar übertrifft) und gleichzeitig den Rechenaufwand um das 10-fache reduziert.
Credit: