Utilizing Natural Dynamics for Reliable Legged LocomotionNatDyReL
Das NatDyReL-Projekt (Utilizing Natural Dynamics for Reliable Legged Locomotion) zielt auf einen grundlegenden Paradigmenwechsel bei der Konstruktion und Steuerung von humanoiden Robotern ab. Dies ebnet den Weg für eine neue Generation von intrinsisch nachgiebigen Robotern, die in der Lage sind, ihre Open-Loop-Aktorimpedanz in Echtzeit an die Aufgabe anzupassen. Am wichtigsten ist jedoch, dass die entwickelten Methoden ihre Anwendung und Anpassung in anderen Morphologien, einschließlich mehrgliedriger Lauf- oder Kletterroboter, ermöglichen werden.
| | |
|---|
Laufzeit | 2019-04-01 bis 2024-09-30 |
Anwendungsfelder | Humanoide Roboter |
Finanzierung | European Research Council (ERC) |
Projektdetails
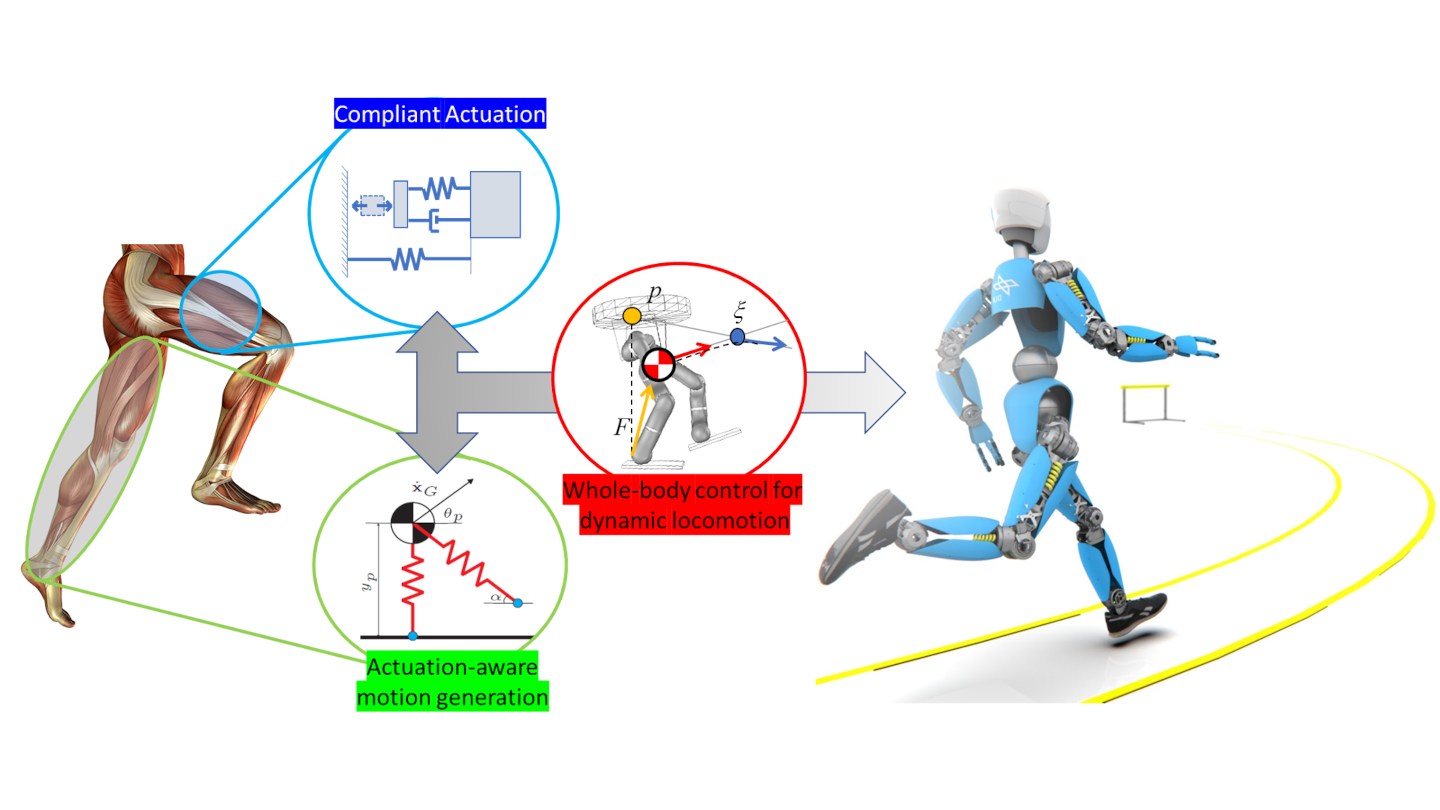
Im Gegensatz zu der inzwischen ausgereiften Technologie der drehmomentgeregelten Antriebe werden die in NatDyReL entwickelten Roboter eine aktive Anpassung der dynamischen Antriebseigenschaften (z.B. Steifigkeit & Dämpfung) erlauben. Dadurch kann der Roboter sein dynamisches Verhalten zur Laufzeit an die aktuellen Bodenverhältnisse bzw. die gewünschte Schrittgeschwindigkeit anpassen. Zusätzlich kann bei jedem Schritt ein Teil der kinetischen Energie in den elastischen Antrieben zwischengespeichert werden, wodurch eine energieeffiziente Ausführung von dynamischen Laufbewegungen ermöglicht wird. Um diese Konzepte in der Praxis erfolgreich umzusetzen, ist es erforderlich, die nachgiebige Antriebsdynamik sowohl bei der Planung der Gesamtkörperbewegung als auch bei der Echtzeitsteuerung vollständig zu berücksichtigen. Das Projekt erfordert somit eine enge interdisziplinäre Zusammenarbeit von Experten aus verschiedenen Disziplinen, insbesondere aus der Robotik, Regelungstechnik und Mechatronik.



{kind=link}