
M-Runners

Das Projekt M-Runners ist Teil des ERC Advanced Grant 2018 mit dem Fokus auf Modal Nonlinear Resonance for Efficient and Versatile Legged Locomotion. ERC-Grants werden in einem offenen Wettbewerb an Projekte von angehenden und etablierten Forschern vergeben, die unabhängig von ihrer Herkunft in Europa arbeiten oder sich dorthin begeben.
Laufzeit: | 2019-06-04 bis 2024-11-30 |
Projektpartner: | |
Anwendungsfelder: | Energieeffiziente, elastische Roboter |
Förderung: | Horizon 2020, ERC, Fördernummer 835284, M-Runners |
Projektdetails
Das Ziel von M-Runners ist, den Erkenntnisgewinn um die fundamentalen Prinzipien der beinbasierten Bewegung so weit zu steigern, dass vier- und zweibeinige Roboter entwickelt werden können, die ähnliche Bewegungscharakteristiken hinsichtlich Versatilität und Effizienz wie ihre biologischen Vorbilder aufweisen.
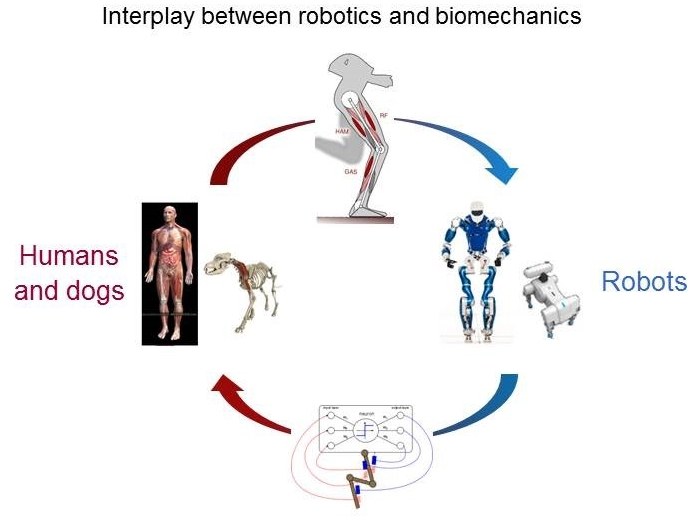
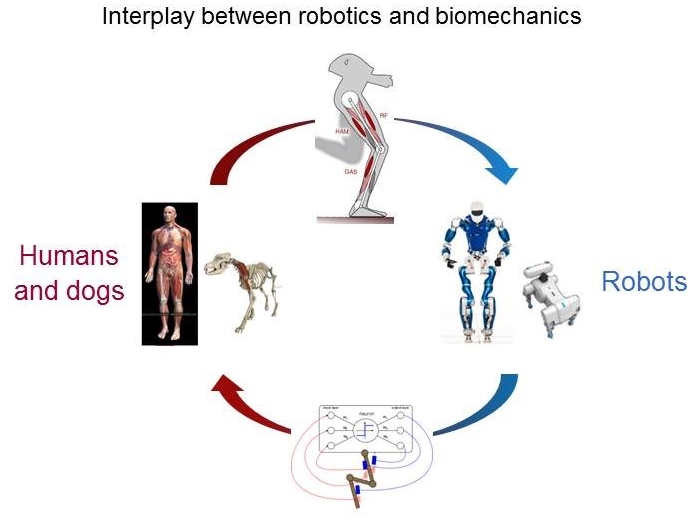
Die zentrale Hypothese des Forschungsvorhabens ist, dass biologische Fortbewegung fundamental durch die bio-mechanische Resonanzeigenschaften des jeweiligen Körpers bestimmt wird und dass ein wissenschaftlicher Durchbruch in der robotischen Lokomotion essenziell von dem Verständnis und der Nutzung dieser Phänomene abhängt. Wenn der Körper so beschaffen ist, dass Gehen und Laufen intrinsischen periodischen Bewegungen des Systems entsprechen, dann wird die Regelung einfach. Robustheit und energieeffizient sind dann natürliche Konsequenzen. Mathematische Methoden zur Beschreibung, Analyse, Entwurf und Regelung von nichtlinearen Resonanzen und elastisch resonanten Robotern fehlen allerdings heute weitestgehend. Das Projekt hat daher als primäres Ziel den Entwurf einer neuen Theorie von nichtlinearen Schwingungen, die auf elastische Mehrkörpersysteme angewandt werden kann, und zwar sowohl auf biologische als auch auf robotische Systeme.
Das Projekt M-Runners betreibt interdisziplinäre Forschung an den Grenzbereichen zwischen Robotik, nichtlineare dynamische Systeme, Biomechanik, Neurowissenschaft und künstlicher Intellligenz (KI).
Wir werden uns von der Biologie hinsichtlich der grundlegenden Bewegungsabläufe und der Muskelanordnungen (Kopplungen, Redundanzen, Compliance -verteilungen) inspirieren lassen. Umgekehrt erwarten wir von unserer Theorie, dass sie neue Hypothesen für ein tieferes Verständnis der Biomechanik, der Fortbewegung und deren Steuerung durch das Nervensystem generiert. Wir werden Roboter entwerfen und demonstrieren, die sich mit ähnlicher Geschwindigkeit und mechanisch-energetischer Effizienz, wie Tiere und Menschen bewegen können und die eine vergleichbare Geländegängigkeit und Robustheit aufweisen. Das primäre Anwendungsszenario ist die Weltraumerkundung auf dem Mars in Canyons, Höhlen oder steilen Berghängen. Mögliche Anwendungsgebiete erstrecken sich aber vom Gesundheitsbereich über Assistenzrobotik bis hin zum Einsatz in Katastrophengebieten.
Die ERC Advanced Grants werden an herausragende Forscher vergeben, die exzellente wissenschaftliche Leistungen und besonders signifikante wie auch originelle Forschungsergebnisse vorweisen können. Sie leiten als Principal Investigators Forschungsprojekte, die in einer öffentlichen oder privaten Forschungseinrichtung in einem der EU-Mitgliedstaaten oder assoziierten Länder durchgeführt werden.
{kind=link}
- Alin Albu-Schäffer, Cosimo Della Santina, "A review on nonlinear modes in conservative mechanical systems", in Annual Reviews in Control, vol. 50, pp 49-71, 2020 [elib]
- Davide Calzolari, Cosimo Della Santina, Alin Albu-Schaffer, "Exponential Convergence Rates of Nonlinear Mechanical Systems: The 1-DoF Case With Configuration-Dependent Inertia", in IEEE Control Systems Letters, vol. 5, no. 2, pp. 445-450, April 2021 [elib]
- Davide Calzolari, Cosimo Della Santina, Alin Albu-Schaffer, "PD-like Regulation of Mechanical Systems with Prescribed Bounds of Exponential Stability: the Point-to-Point Case", in IEEE Control Systems Letters, December 2020, doi: 10.1109/LCSYS.2020.3046538.
- Cosimo Della Santina, Alin Albu-Schaeffer, "Exciting efficient oscillations in nonlinear mechanical systems through Eigenmanifold stabilization", in IEEE Control Systems Letters, December 2020, [elib]
- Matthias Kohler, Philipp Stratmann, Florian Röhrbein, Alois Knoll, Alin Albu-Schäffer, Henrik Jörntell, "Biological data questions the support of the self inhibition required for pattern generation in the half center model", in PLoS ONE, vol. 15, no. 9, September 2020 [elib]
- Daniel Seidel, Milan Hermann, Thomas Gumpert, Florian C. Loeffl, Alin Albu-Schaffer, "Using Elastically Actuated Legged Robots in Rough Terrain: Experiments with DLR Quadruped bert", 2020 IEEE Aerospace Conference, Big Sky, USA, March 2020, pp. 1-8 [elib]
- Davide Calzolari, Alessandro Massimo Giordano, Alin Albu-Schaffer, "Error Bounds for PD-Controlled Mechanical Systems Under Bounded Disturbances Using Interval Arithmetic", in IEEE Robotics and Automation Letters, vol. 5, no. 2, pp. 1231-1238, April 2020 [elib]
- Dominic Lakatos, Yuri Federigi, Thomas Gumpert, Bernd Henze, Milan Hermann, Florian Loeffl, Florian Schmidt, Daniel Seidel, Alin Albu-Schaffer, "A Coordinate-based Approach for Static Balancing and Walking Control of Compliantly Actuated Legged Robots", 2019 International Conference on Robotics and Automation (ICRA), Montreal, Canada, May 2019, pp. 9509-9515 [elib]