
Ganzkörperregelung für kombinierte Bewegung von Roboterarm und Rollstuhl

{kind=link}
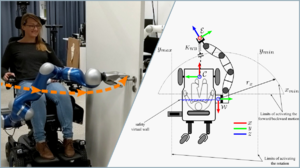
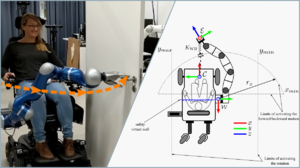
Leichtbauroboter in Kombination mit Elektrorollstühlen können dazu beitragen, die Mobilität von Menschen mit Behinderungen wiederherzustellen. Zwar sind solche Systeme bereits auf dem Markt erhältlich, aber sie sind typischerweise auf vollständig manuelle Steuerungsmodi beschränkt. In unserem Forschungsteam haben wir ein Ganzkörper-Steuerungskonzept für das assistive Robotersystem EDAN eingeführt. Diese Ganzkörpersteuerung ermöglicht die Realisierung komplexer Aufgaben, die eine zeigleiche Koordination von Arm und Plattform erfordern und zudem ein nachgiebiges Verhalten aufgrund des Impedanzsteuerungsgesetzes gewährleisten. Dies zeigt sich in verschiedenen Aufgaben wie z. B. dem Öffnen und Durchfahren einer Tür oder dem Öffnen einer Schublade. Während diese Aufgaben bei einem klassischen Ansatz die Reichweite des Arms überschreiten würden, ermöglicht die Ganzkörpersteuerung eine schnelle und effiziente Ausführung, indem der Rollstuhl automatisch mitbewegt wird, wann immer es die Aufgabe erfordert.
Veröffentlichungen
Maged Samuel Zakri Iskandar, Gabriel Quere, Annette Hagengruber, Alexander Dietrich, und Jörn Vogel, "Employing Whole-Body Control in Assistive Robotics", In: Proc. of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, pp. 5643-5650. 4.-8. Nov 2019. [elib]