
Überwachte Autonomie zur Erhöhung des Bedienkomforts

{kind=link}
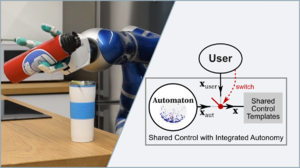
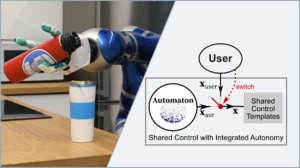
Die teilautonome Unterstützung erleichtert die Robotersteuerung bei der Ausführung von alltäglichen Tätigkeiten. Von den Nutzenden kann es jedoch aufgrund von Faktoren wie Arbeitsbelastung, Systemvertrauen oder Engagement oftmals gewünscht sein, dass der Roboter eine Aufgabe eigenständig erledigt. Idealerweise kann der Grad an Autonomie des Roboters frei eingestellt werden. Um dies zu ermöglichen, erweitern wir den Teilautonomie-Ansatz um ein automatisches Steuerungsmodul (den sogenannten "Automaten"). Dieser Automat erlaubt es dem Nutzenden, während der Aufgabenausführung jederzeit zwischen Teilautonomie und überwachter Autonomie zu wechseln. Da beide Unterstützungsmodi die gleiche Handlungsrepräsentation verwenden, sind die Übergänge nahtlos.
Veröffentlichungen
Samuel Bustamante Gomez, Gabriel Quere, Katharina Hagmann, Xuwei Wu, Peter Schmaus, Jörn Vogel, Freek Stulp, und Daniel Leidner, "Toward Seamless Transitions Between Shared Control and Supervised Autonomy in Robotic Assistance," in Proc. of the 2021 IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 3833-3840, April 2021. [elib]