
ESA-ISS-Experiment: Astronaut steuert Rover auf der Erde

{kind=link}
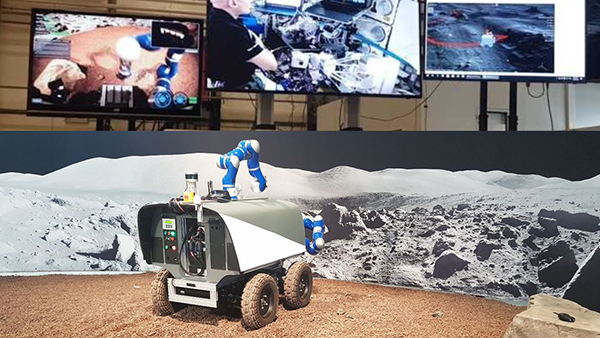
Am 25. November fand das ESA-ISS-Telerobotik-Experiment Analog-1 mit Hilfe von robotischer DLR-Technologie statt: Astronaut Luca Parmitano steuerte den Interact-Rover der Europäischen Raumfahrtagentur (ESA) in einem der Mondoberfläche ähnlichen Testgelände in Valkenburg, Niederlande. Dort sammelte er erfolgreich Gesteinsproben mit einem Roboterarm. Erstmalig wurde ein derart komplexer Roboter aus dem All mit Kraftrückkopplung ferngesteuert. Diese Teleoperations-Regelung wurde am DLR-Institut für Robotik und Mechatronik entwickelt.
Bereits am Montag, den 18. November, hat Luca Parmitano während seines "proficiency run" die Fernsteuerung des Rovers und des Roboterarms getestet. In diesem Experiment konnte ein Mensch zum ersten Mal einen Roboter auf der Erde von der ISS aus in alle Richtungen bewegen sowie selbst die Kräfte wahrnehmen, die der Roboter spürt.
Mit Hilfe dieser Kraftrückkopplung kann der Astronaut die Interaktionskräfte des Roboters intuitiv steuern und somit auch filigrane Aufgaben ausführen. DLR-Wissenschaftler Harsimran Singh erklärt: "Der Regelungsansatz des DLR stellt sicher, dass der Roboter keine Kräfte auf die Umgebung aufbringt, bevor der Astronaut sie spürt. Dies ist besonders bei hoher Zeitverzögerung entscheidend für die Sicherheit der Interaktion des Roboters mit seiner Umgebung."
Die Technologie der Teleoperation ist auf der Erde ohnehin komplex, aber im All gibt es zusätzliche Herausforderungen, erklärt DLR-Wissenschaftler Michael Panzirsch: "Zum Einen wird die Force Feedback-Kopplung durch sehr hohe und variable Zeitverzögerung von durchschnittlich 800ms, mit Ausreißern von bis zu 3 Sekunden, Datenpaketverlust oder sogar Kommunikationsunterbrechungen beeinträchtigt. Zum Anderen befindet sich der Astronaut in Mikrogravitation, was zu Einbußen in der Sensomotorik führen kann und somit potentiell die Teleoperation erschwert."
Das Experiment Analog-1 ist das abschließende Glied in einer Kette von Experimenten namens METERON, in denen unter anderem untersucht wird, wie sich intelligente Roboter auf Planetenoberflächen durch Astronauten im Orbit steuern lassen.
Bereits 2017 und 2018 steuerten Astronauten wie Alexander Gerst den humanoiden Roboter Justin im DLR-Roboterlabor von der ISS. Sollten Roboter zukünftig den Mond oder Mars erkunden, oder dort eine Infrastruktur aufbauen oder instand halten, könnten Astronauten von einer Raumstation aus die autonomen Roboter bedienen.
"Auch wenn diese Art von Experimenten einfach aussieht, erfordert die technische Komplexität (Zusammenspiel Mensch-Roboter) unter den Bedingungen auf der Raumstation die Zusammenarbeit von vielen Experten.“, sagt Thomas Krüger, Leiter des Human Robot Interaction Labors der ESA. „Wir sind sehr glücklich mit der Kooperation mit dem DLR, und hoffen dies auch in Zukunft und weiteren Missionen fortzusetzen“

