The research project FACILITATORS (FACILIties for Testing (at) ORbital and Surface) aimed at enabling the highest possible level of validation of space robotic technologies, in the most relevant environment, by adapting and providing the best available European test facilities needed by each technology. The DLR contributed with facilities dedicated to both orbital robotics and planetary exploration. To reach the goals of FACILITATORS the DLR provided its two dedicated test facilities: the On-Orbit Servicing Simulator (OOS-SIM) for the orbital robotics track and the Planetary Exploration Lab for the planetary exploration track. For the latter track, a parallel comprehensive test campaign was also conducted in a representative Martian analogue test site.
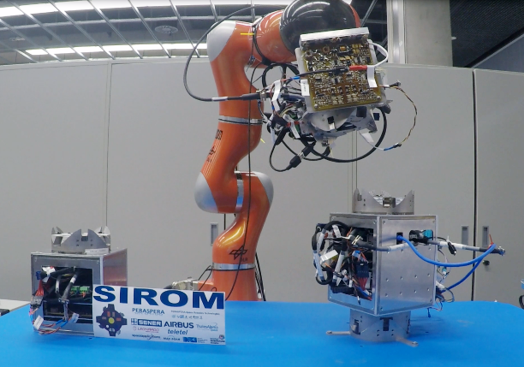
In the orbital robotics track, DLR's OOS-SIM experimental facility was used to provide camera images of a tumbling target satellite with realistic orbital illumination conditions and ground truth information, which were used to validate perception-related algorithms developed in the InFuse project (EC). Furthremore, a Light-Weight Robot (LWR) was used to validate the standard interface developed within the SIROM project (EC). This interface is intended to connect payloads in planetary and orbital applications with manipulators, providing a physical connection, as well as transfer of electrical power, data, and heat. The use of the LWR was advantageous for performing a demonstrative docking task of the SIROM interface, due to it's intrinsic compliance.
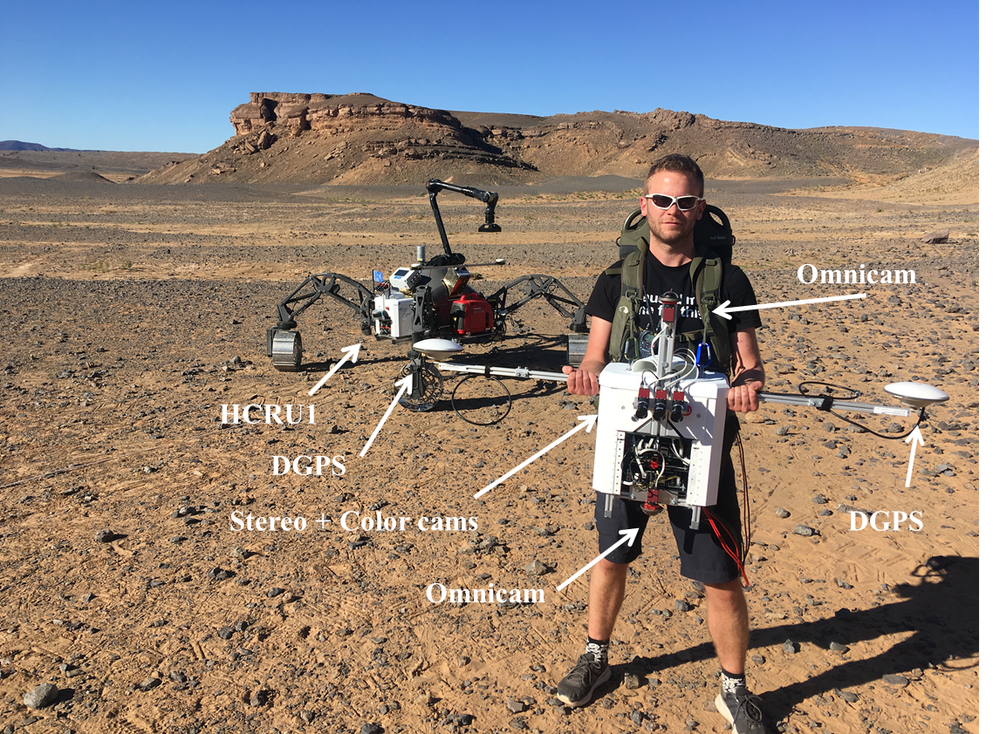
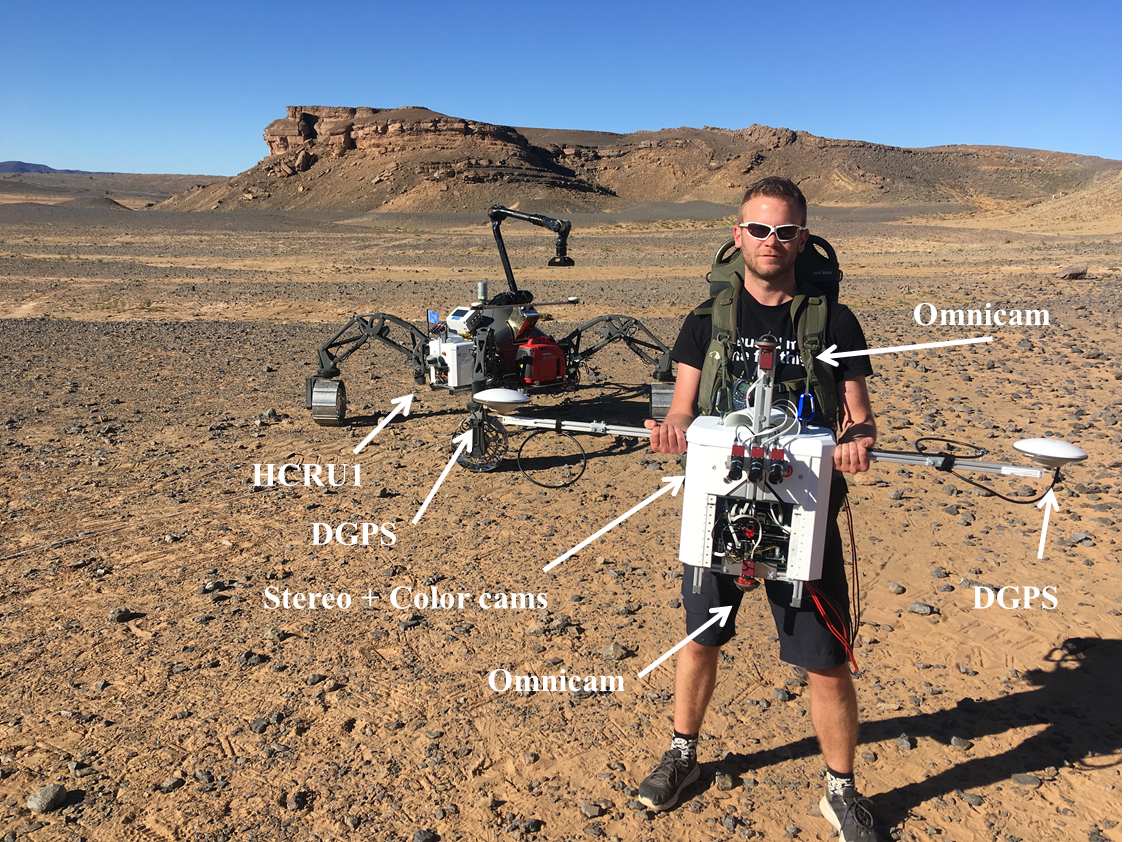
To validate the suitability for future planetary exploration, tests in DLR's Planetary Exploration Laboratory were combined with a test campaign in the Moroccan desert. The laboratory allows tests under well defined conditions whereas long range tests or tests under natural environmental conditions are primarily performed in the analog area. The desert terrain there resembles the conditions on Mars in its appearance as well as in the composition of the local soils in many areas and is therefore ideally suited for testing robotic systems and the developed components with regard to exploration and operation in Mars-like areas.




{kind=link}
{kind=link}
{kind=link}