Multi-Agent SLAM Algorithmen
In unbekannten Umgebungen, z. B. im Weltraum oder unter der Erde, ist kein externes Ortungssystem wie das Global Positioning System (GPS) verfügbar. Mobile Roboter, die solche Umgebungen erforschen, müssen sich nur mit ihren bordeigenen Sensoren lokalisieren. Eine Lokalisierung ohne vorherige Kenntnis der Umgebung ist schwierig. Um sicher durch die Umgebung zu navigieren, muss der Roboter eine Karte der Umgebung erstellen. Außerdem ist diese Karte notwendig, um unbesuchte Bereiche zu erkennen. Um eine genaue Karte der Umgebung zu erstellen, benötigt der Roboter eine gute Positionsschätzung. Auf der anderen Seite wird eine genaue Karte zur Verbesserung der Lokalisierung verwendet. Der Roboter muss seine Position schätzen, während er die Umgebung abbildet. Dieses Problem ist als SLAM-Problem (Simultaneous Localization And Mapping) bekannt.
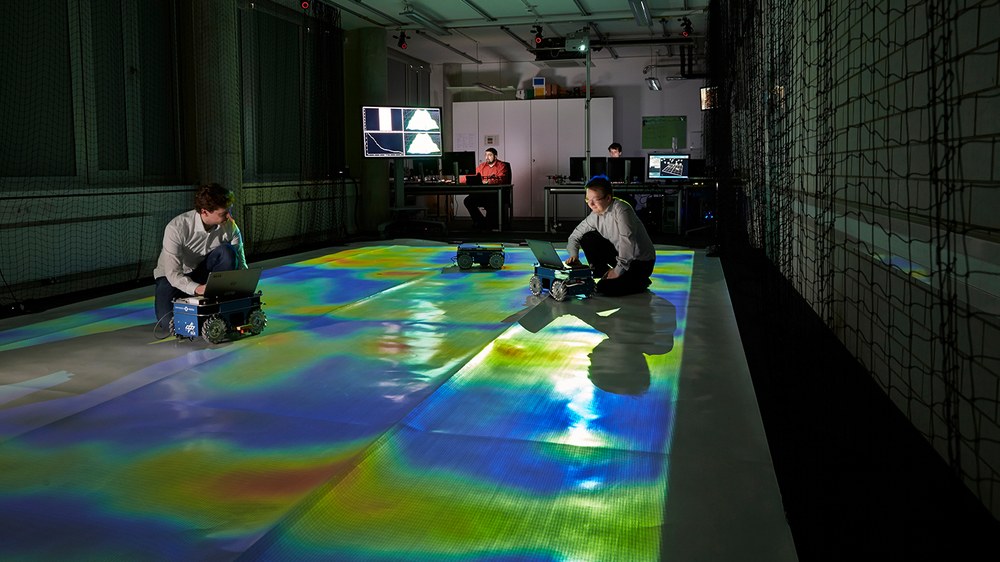
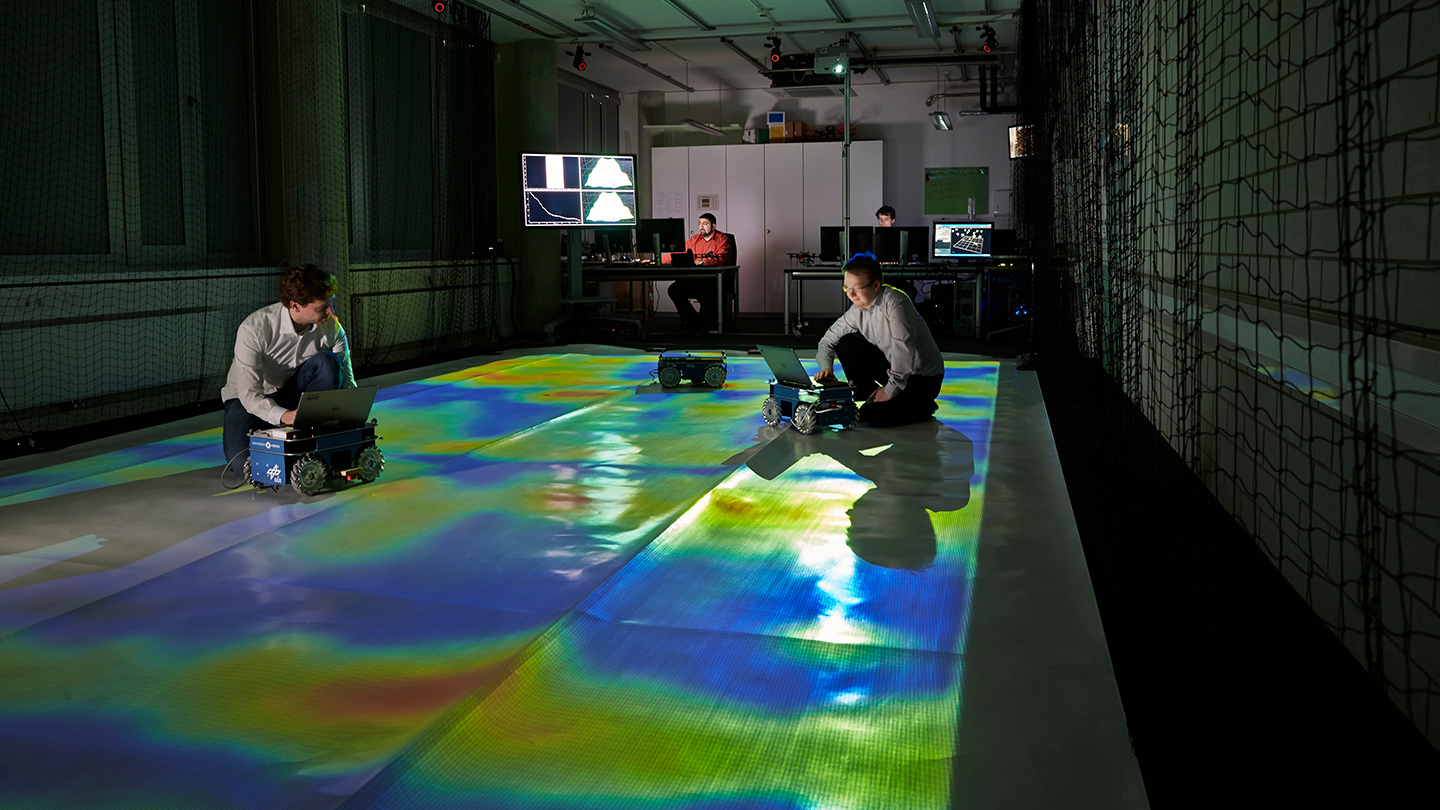
Bei den in unserer Gruppe durchgeführten Experimenten werden mobile Roboterplattformen mit Lasersensoren eingesetzt, um SLAM bei der Erkundung unbekannter Umgebungen durchzuführen. Für reale Experimente verwenden wir holonome mobile Roboter. Holonomisch bedeutet, dass der Roboter in jede Richtung fahren kann, auch seitwärts. Unsere Roboter sind mit einem dreidimensionalen LiDAR-Sensor ausgestattet, der Punktwolkenmessungen von 360° liefert. Aus den Punktwolkeninformationen wird eine Karte erstellt, die dann von der Roboterplattform für Navigations- und Erkundungszwecke verwendet wird.
SLAM selbst fungiert als passive Komponente und gibt keine Antwort auf die Frage, wie die nächste Aktion und Bewegung zu wählen ist, um die Fehler bei der Schätzung der Variablen zu minimieren. Die Kombination von SLAM mit einer aktiven Komponente wird als integrierte Exploration bezeichnet.
Die integrierte Exploration ist für die Berechnung und Bewertung des Nutzens weiterer Aktionen verantwortlich, die den Fehler bei der Lokalisierung, der Abbildung und der Prozessschätzung minimieren. Bei der Auswahl zukünftiger Aktionen ist es wichtig, einen Kompromiss zwischen Exploration (Entdeckung neuer Bereiche zur Erweiterung des Wissens über den statischen Prozess und die Karte) und Exploitation (erneutes Aufsuchen früherer Bereiche zur Minimierung des durch die Bewegung verursachten Lokalisierungsfehlers) zu finden.
Außerdem sind wir daran interessiert, physikalische Phänomene in den unbekannten Gebieten zu erforschen (räumliche Prozesse wie Magnetfeldstärke, Temperatur, Ozonkonzentration usw.). Daher kombinieren wir mehrere Ziele: Kartenabdeckung, Beibehaltung der Lokalisierungsunsicherheit und Verringerung des Prozessfehlers in Bezug auf die Bodenwahrheit.









{kind=link}
{kind=link}