Multi-Agent SLAM algorithms
In unknown environments, e.g., in space or underground, no external positioning system like the Global Positioning System (GPS) is available. Mobile robots, exploring those environments, need to localize themselves only with their on-board sensors. Localization without any prior knowledge of the environment is difficult. To navigate safely through the environment, the robot needs to create a map of the area. Moreover, this map is necessary for the detection of unvisited areas. To create a precise map of the environment, the robot needs a good position estimate. On the downside, a precise map is used to improve the localization. The robot needs to estimate its position while mapping the environment. This problem is known as the Simultaneously Localization And Mapping (SLAM) problem.
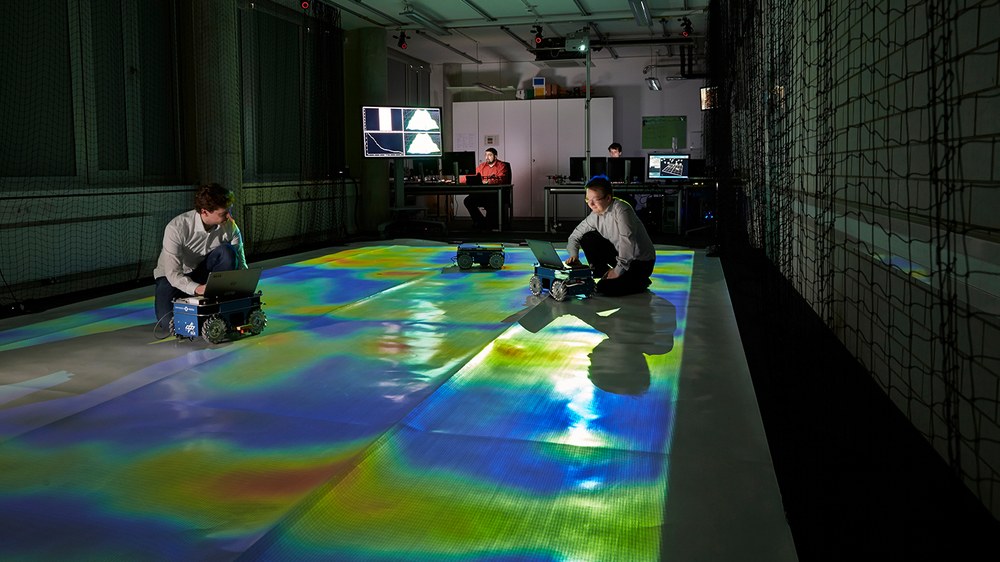
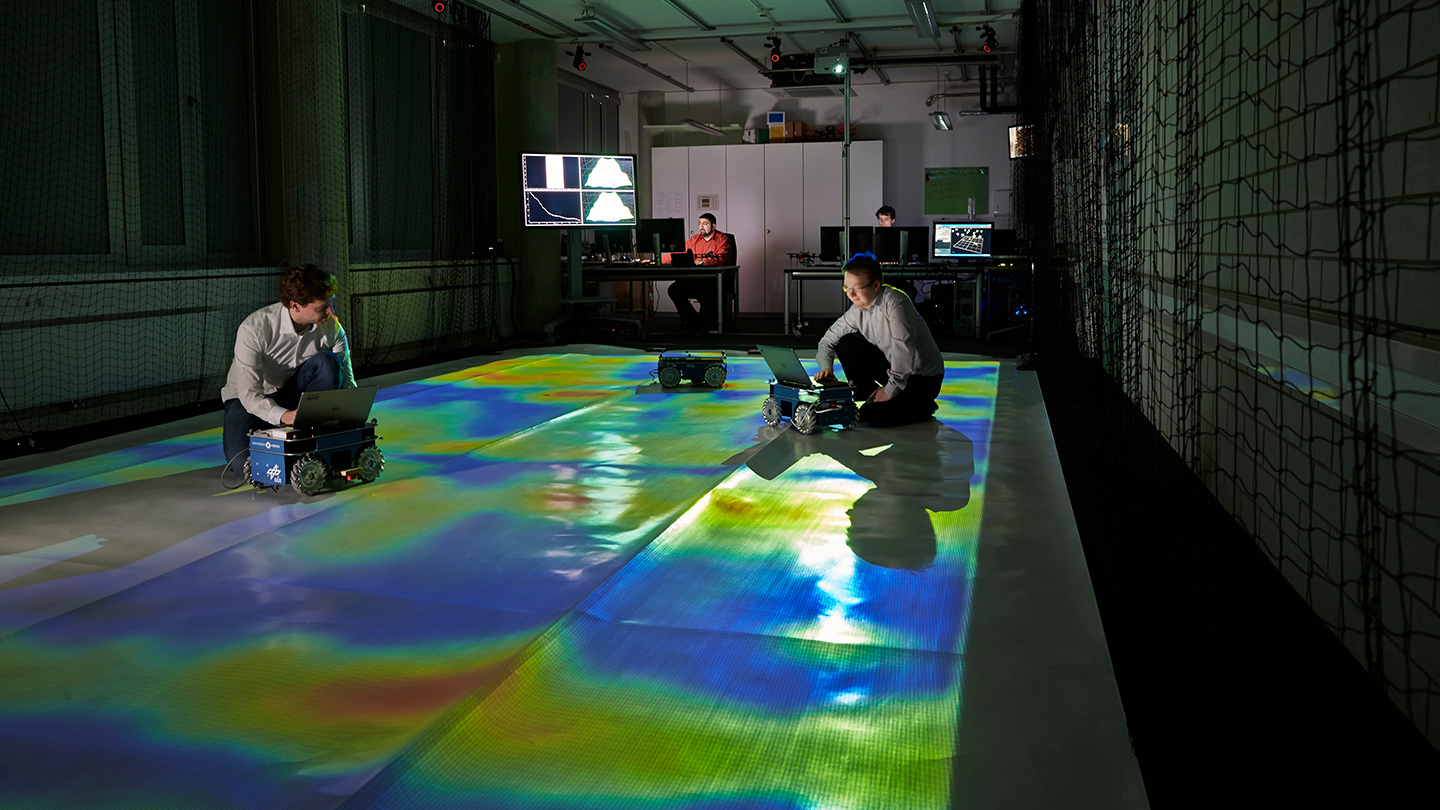
For the experiments conducted in our group, mobile robotic platforms equipped with laser sensors are employed to perform SLAM while exploring unknown environments. For real-world experiments, we are using holonomic mobile robots. Holonomic means that the robot is able to drive in every direction, including sideways. Our robots are equipped with a three-dimensional LiDAR sensor which provides point cloud measurements of 360°. A map is created out of the point cloud information which is then used by the robotic platform for navigation and exploration purposes.
SLAM itself acts as a passive component and does not give an answer how to choose the next action and movement to minimize errors in estimates of the variables. Combining SLAM with an active component is named integrated exploration.
Integrated exploration is responsible for computing and evaluating utility of further actions that minimize the localization, mapping and process estimation error. For choosing future actions it is important to find a trade-off between exploration (discovering new areas to extend knowledge about the static process and the map) and exploitation (revisiting previous areas to minimize the localization error introduced by motion).
Furthermore, we are interested in exploring physical phenomena in the unknown areas (spatial processes such as magnetic field intensity, temperature, ozone concentrate, etc.). Therefore, we combine multiple objectives: map coverage, maintaining localization uncertainty and decrease in process error in respect to the ground truth.









{kind=link}
{kind=link}