When swarms of autonomous robots sniff out hazardous gases
December 5, 2024 | Pioneering wind tunnel experiments – valuable insights for disaster relief
When swarms of autonomous robots sniff out hazardous gases
Measuring drone approaches the gas source
This clip clearly shows how the drone's rotors churn the surrounding air, disrupting the sensors and preventing them from capturing accurate measurement data. As part of the experiments conducted in the wind tunnel, the DLR team is investigating, among other factors, which areas of the drones are more suitable for recording gas concentration and wind strength. Furthermore, correction algorithms are to be developed at a later stage to eliminate the errors in measurement data caused by the downdraft effect.
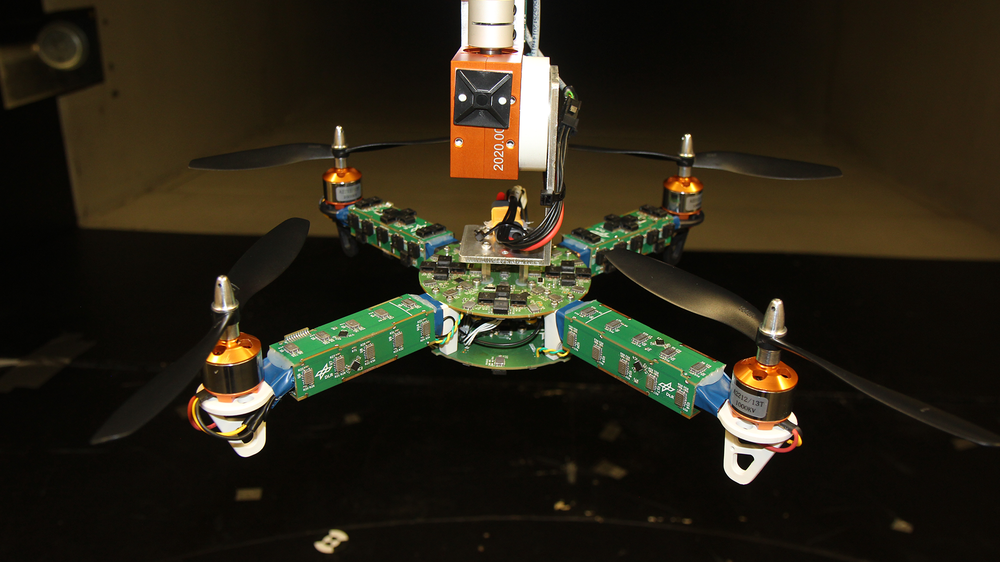
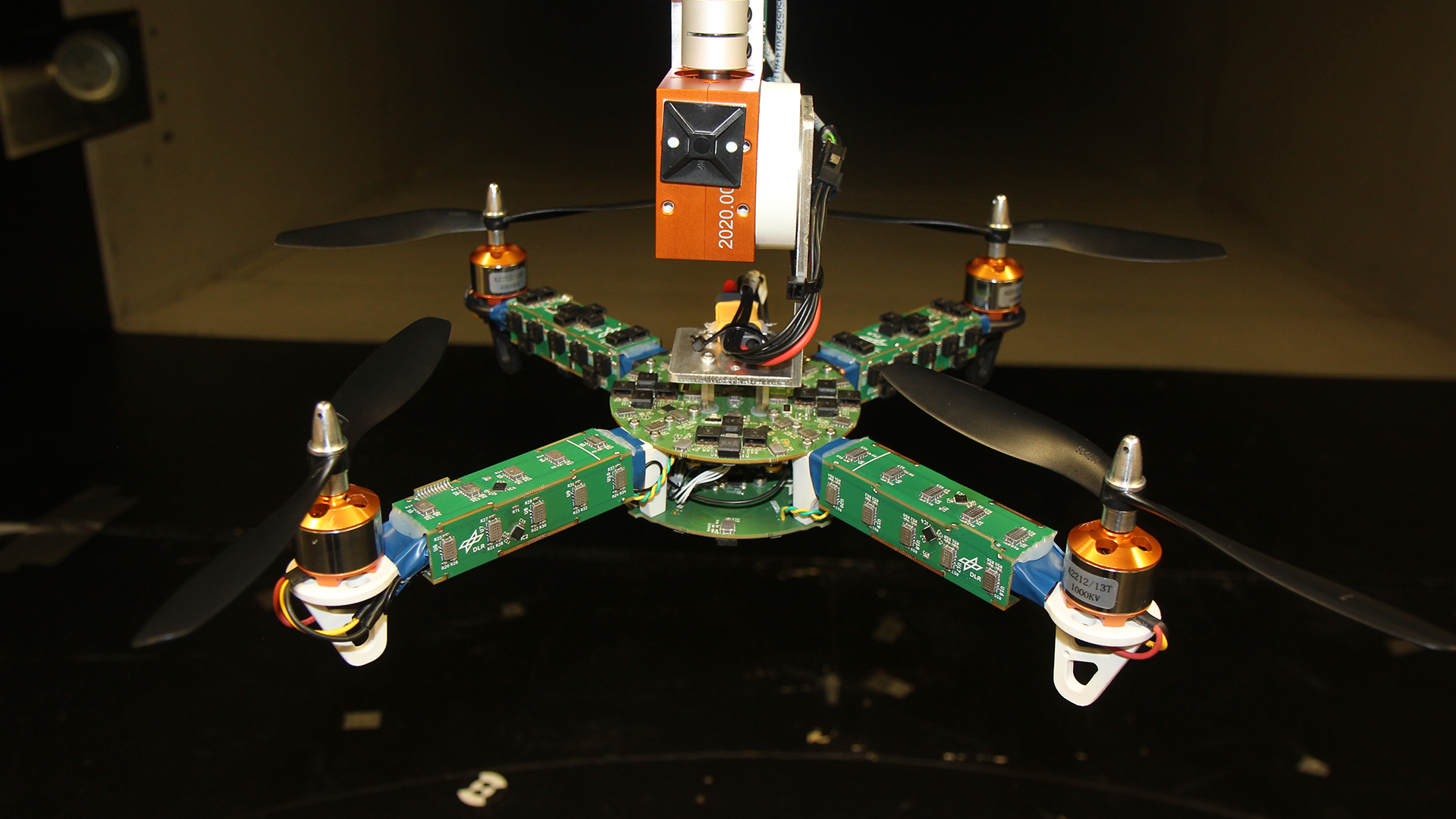
The test drone, a quadrocopter equipped with sensors
The drone is mounted on a 3D scanner that guides the drone through the gas cloud in the wind tunnel in three-dimensional space. The black sensors measure wind speed, while the grey sensors detect the gas.
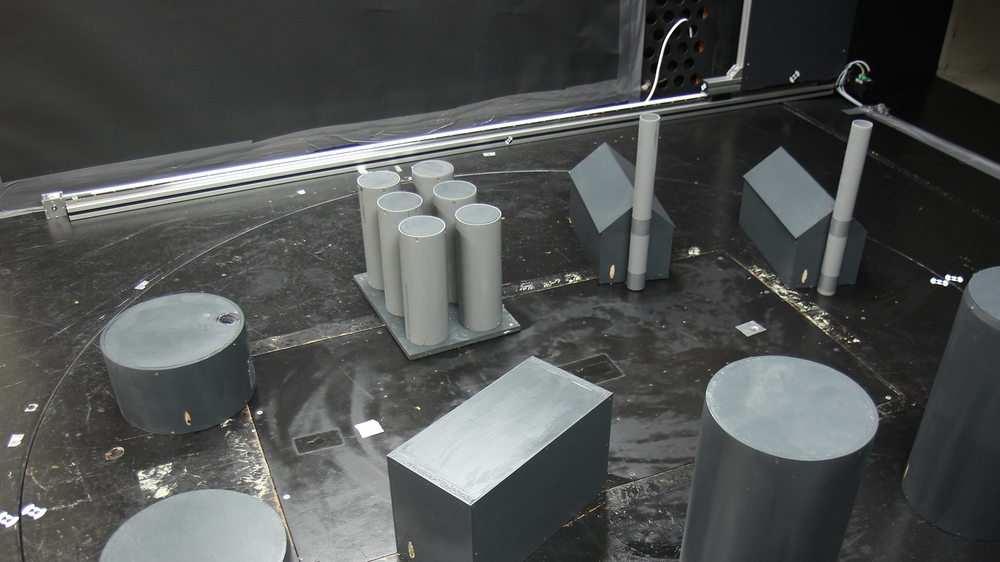
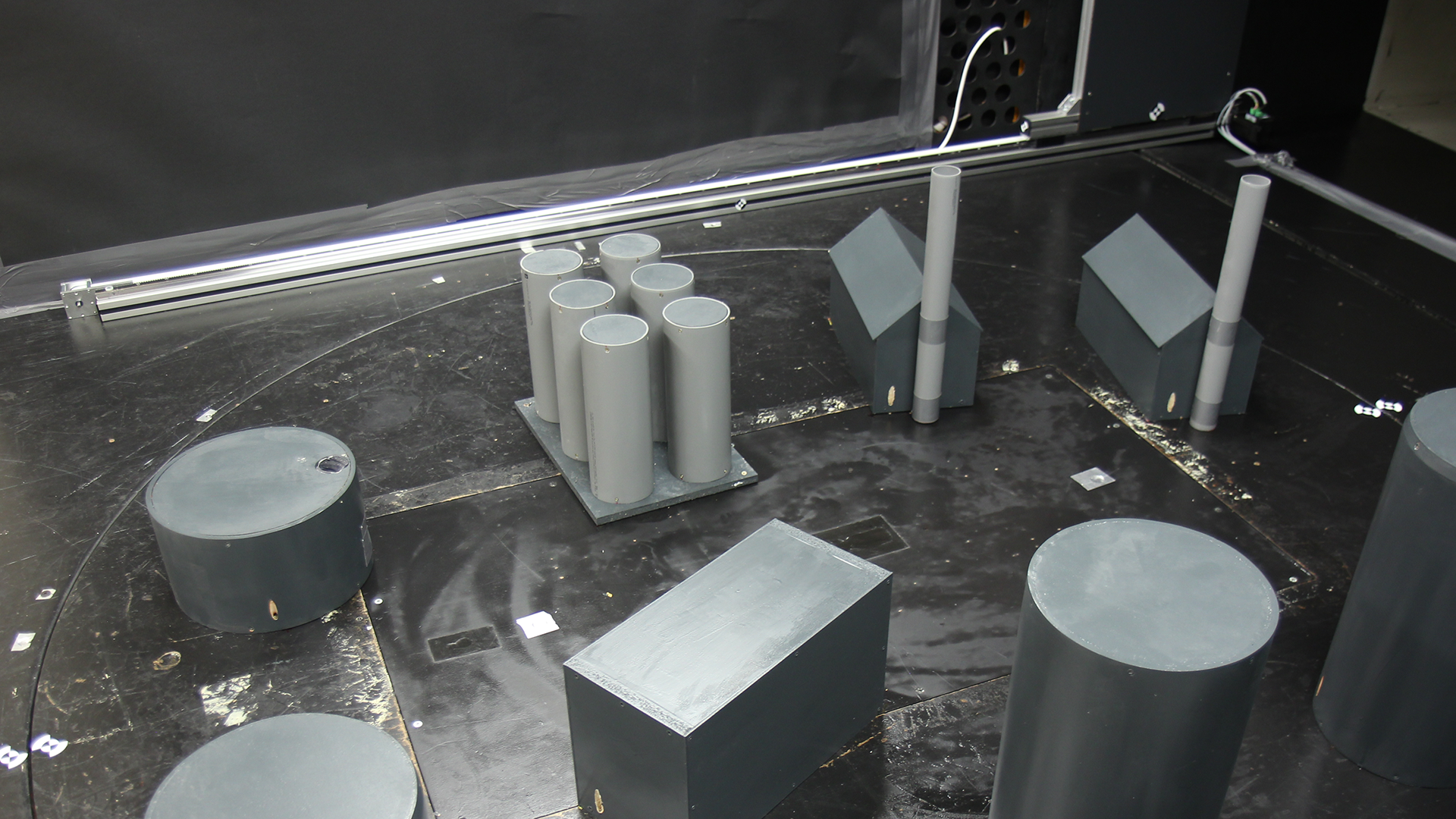
Various objects serve as miniature models of buildings and industrial plants. They are positioned in the path of the fog cloud in the direction of the wind, and the gas sensor array on the 3D volume scanner detects the cloud to characterise its dynamics around obstacles.
DLR has conducted wind tunnel experiments to explore various methods for robots and drones to monitor the behaviour of airborne gases.
The aim of the research is to gather data on gas dispersion within controlled environments, in order to combine new machine learning techniques with established physical models.
In the future, a network of autonomous robotic platforms could pinpoint the location of hazardous gases and predict their development in the atmosphere, offering critical support to emergency services.
In the event of an accident involving dangerous substances, effective disaster management hinges on understanding precisely how these harmful substances move through the air. Such knowledge can mean the difference between life and death, helping emergency services to respond swiftly and take appropriate action. This is where a project, led by the German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt; DLR), plays a pivotal role. The project focuses on developing autonomous robot swarms to provide cutting-edge solutions for localising and monitoring atmospheric gases. By combining advanced machine learning (ML) techniques with physical models, these robots and drones can autonomously predict the dynamics of airborne gases – in the future, deploying in swarms covering the largest possible area. Following initial experiments in the wind tunnel in March 2023, the test series resumed and was successfully completed in September 2024.
The project's central concept is to create a decentralised swarm of robotic platforms, each equipped with sensors capable of detecting the spread of chemicals or other substances in the air. These robots can operate both as ground-based units and as drones in flight. By collaborating and sharing data, the swarm can collectively monitor the dynamics of gaseous substances across extensive areas, providing critical insights for disaster response teams.
Experiments in the wind tunnel – beyond aircraft research
To turn their vision into reality, the team from the DLR Institute of Communications and Navigation conducted a series of experiments at the wind tunnel in Marknesse, Netherlands. While wind tunnels are typically associated with testing aircraft designs and other aerodynamic research, they are also proving invaluable for enhancing robots' ability to detect gases. The wind tunnel differs from conventional wind tunnels by enabling experiments at very low wind speeds. Such conditions are necessary to create a realistic, controlled test environment to study the behaviour of gases in an airflow, as well as the dynamics of their propagation and concentration. Within the wind tunnel, the controlled cloud, maintained under steady wind conditions, is described as 'quasi-stationary'. This allows researchers to examine the dispersion dynamics independently of time. Such stability is crucial, as it ensures that measurements taken at different locations remain comparable, even when measured at different times.
Objectives of the wind tunnel experiments
Controlled conditions for reliable results: By regulating wind speed, researchers can meticulously study gas behaviour. This data is crucial for optimising detection algorithms.
Simulation of real-world challenges: In practice, rescue workers often face complex conditions such as dense smoke or turbulent air. The wind tunnel facilitates the simulation of these scenarios, aiding in the optimisation of sensors and models for such environments.
Safety considerations: The wind tunnel enables safe experimentation using 'toy gases' that replicate real conditions without posing any danger.
Comparison of sensor technologies: Testing various sensors under identical conditions allows for the assessment of their suitability across different applications.
In the wind tunnel, scientists simulated the atmospheric dispersion of gases and examined how turbulence around a drone affects its onboard sensors. These findings aim to underpin a new generation of autonomous robots capable of exploring hazardous environments and providing real-time data for disaster relief.
A key innovation of the project is the integration of advanced machine learning techniques with physical models of how different gases disperse in the air. This combination should not only enable networked robots to predict their surroundings but also reduces the necessity for extensive training data, which can be costly and time-consuming to gather. The objective is to train these robots to adapt to new environments with minimal additional training data.
Robots 'see' well, but 'smelling' remains a challenge
When we think of autonomous robots, images of futuristic machines or planetary exploration rovers often come to mind. These robots are typically equipped with state-of-the-art cameras, enabling them to 'see', analyse and interact with their surroundings with remarkable precision. Thanks to advances in camera technology and artificial intelligence, rovers can explore Mars, for example, with remarkable independence. By generating vast amounts of data, these robots feed sophisticated algorithms that help them learn and adapt their behaviour in real time.
However, the capabilities of robots to 'smell' – to detect and analyse chemical compounds in their environment – lag far behind their visual prowess. Unlike cameras, which provide high-resolution, real-time data over both short and long distances, chemical sensors often face hurdles. Many can only detect compounds in their immediate vicinity, have slower reaction times and operate with lower update rates in comparison. These limitations pose significant obstacles to the autonomous exploration of non-visual environmental factors.
High-tech approaches to data collection in wind tunnel tests
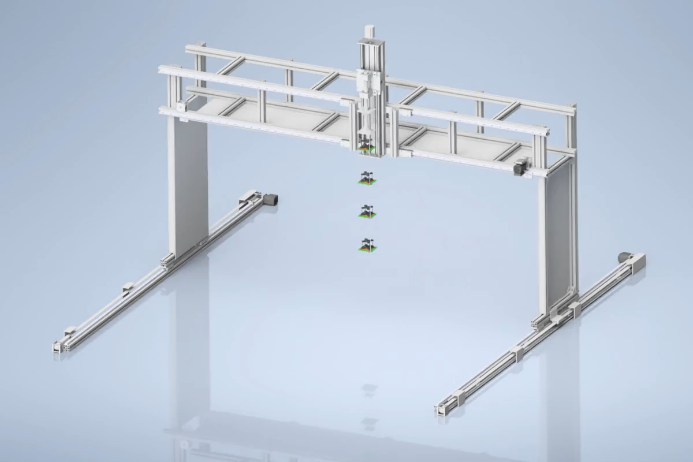
Schematic representation of the 3D volume scanner with mounted gas sensor array
The 3D volume scanner manoeuvres a centrally mounted sensor array, comprising four sensor units, through the gas cloud within the wind tunnel. It traverses the scanner back and forth, left and right, and up and down across three levels.
For these experiments, researchers developed – among other things – an innovative 3D volume scanner that positions sensors at multiple spatial levels with millimetre precision, enabling high-resolution measurements of gas clouds. Models of structures such as buildings and industrial plants were placed on the ground to study gas dispersion and concentration around obstacles. The results provide a crucial database for validating physical and theoretical models of gas dispersion.
In one experiment, the scanner recorded the dispersal of a controlled methane release from various angles, employing a laser to analyse different scanning patterns. This approach measured methane concentrations through specific light absorption, enabling detection of even trace amounts of the greenhouse gas.
Measuring drone approaches the gas source
The rotors of the drone churn the surrounding air, disrupting the sensors and preventing them from capturing accurate measurement data. The DLR team is investigating, among other factors, which areas of the drone are more suitable for accurate measurements. Furthermore, correction algorithms are to be developed at a later stage to eliminate the errors in measurement data caused by the 'downwash' effect.
In another series of experiments, the team investigated the role of drones in the detection of gases and their concentration in the air. Drones offer enormous potential for use in hazardous environments, but the downdraft effect generated by their rotors can strongly influence the measurements. Equipped with sensors to measure the wind flow as well as for gas detection, the drone was guided into the fog cloud in the wind tunnel. As a result, the gas concentration and wind patterns were measured at various points on the drone.
Another experiment focused on detecting gas leaks using a laser sensor. Instead, the laser sensor detected the escaping cloud of 'toy gas' from the side and at a distance. It scanned the cloud from various angles and analysed different scanning patterns. By measuring the specific light absorption of a gas at varying concentrations, the laser can determine gas concentrations, even for small amounts of gases such as methane, a potent greenhouse gas.
In addition to the DLR Institute of Communications and Navigation, the Institute of Flight Guidance at the DLR site in Braunschweig is contributing to the project. Researchers are working on a specific application in which several multicopters from a heterogeneous swarm locate gas sources as efficiently as possible in an unknown area. The institute is responsible for the autonomous mission planning of the drones and for replanning flight paths during the mission.
Next steps towards an autonomous robot swarm for disaster relief
The data collected during the project is now being processed and made available to the scientific community to advance research in environmental monitoring and disaster management. Data and expertise from this project are being integrated into another DLR project, in which multiple institutes are collaborating on a measurement concept for the future hydrogen economy, such as detecting leaks. In this context, the DLR Institute of Communication and Navigation, along with the Institutes of Technical Physics and Atmospheric Physics, are contributing to a shared work package. While the Institute of Atmospheric Physics works on refining computer models for gas dispersion, the Institute of Communication and Navigation is tasked with integrating these advances on robotic platforms. This involves answering critical operational questions, such as which robot, equipped with which sensors, should move to which location. To solve these and similar complex problems, algorithms are being developed to coordinate the robots in a swarm. These robots will autonomously analyse real-time measurement data and decide how to position themselves for optimal detection of the dynamically changing hydrogen cloud.



{kind=link}
{kind=link}
{kind=link}