Wenn autonome Roboter im Schwarm gefährliche Gase erschnüffeln sollen
5. Dezember 2024 | Neuartige Experimente im Windkanal – wertvolle Erkenntnisse für die Katastrophenhilfe
Wenn autonome Roboter im Schwarm gefährliche Gase erschnüffeln sollen
Messdrohne nähert sich der Gasquelle
Die Rotoren der Drohne verwirbeln die Umgebungsluft, sodass die Messsensoren keine korrekten Messdaten erfassen können. Bei den Experimenten im Windkanal untersucht das DLR-Team unter anderem, welche Stellen der Drohnen besser geeignet sind als andere. Auch sollen später Korrektur-Algorithmen entwickelt werden, um die Messfehler durch die Abwinde, den sogenannten Downwash-Effekt, aus den Messdaten herauszurechnen.
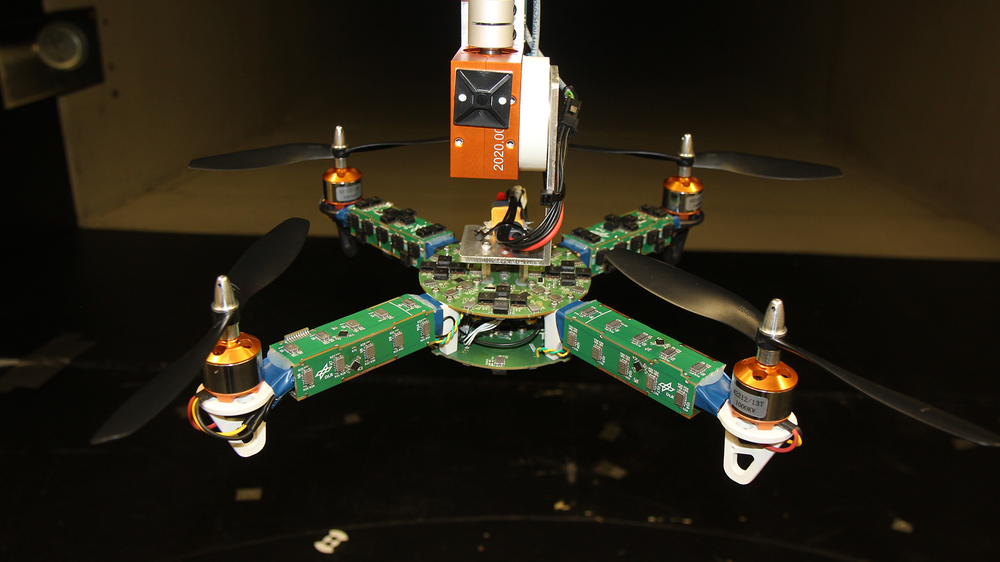
Die Versuchsdrohne, ein mit Sensoren ausgestatteter Quadrocopter
Die Drohne ist am 3D-Scanner befestigt, der die Drohne im dreidimensionalen Raum durch die Gaswolke im Windkanal führt. Die schwarzen Sensoren messen die Windgeschwindigkeit, die grauen detektieren das Gas.
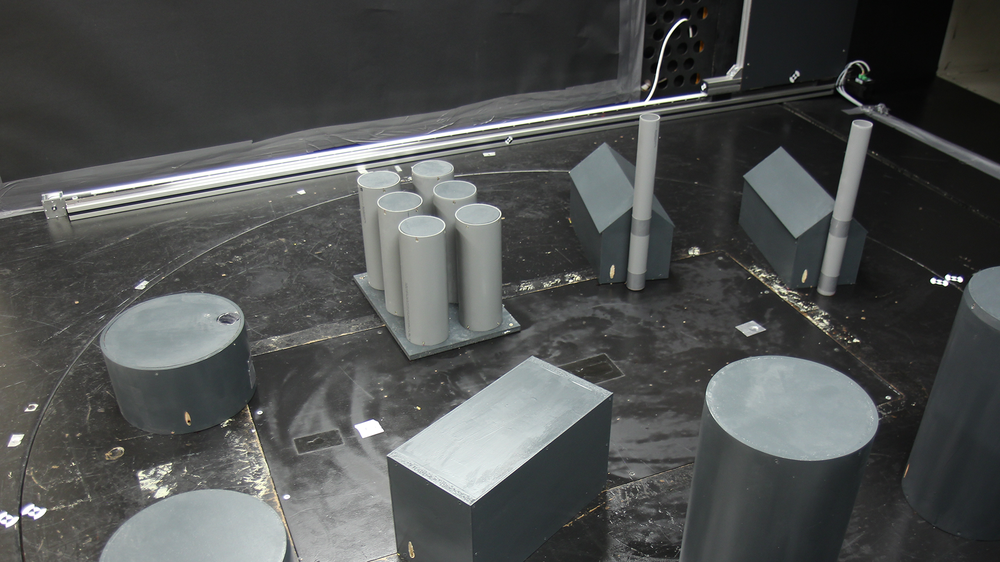
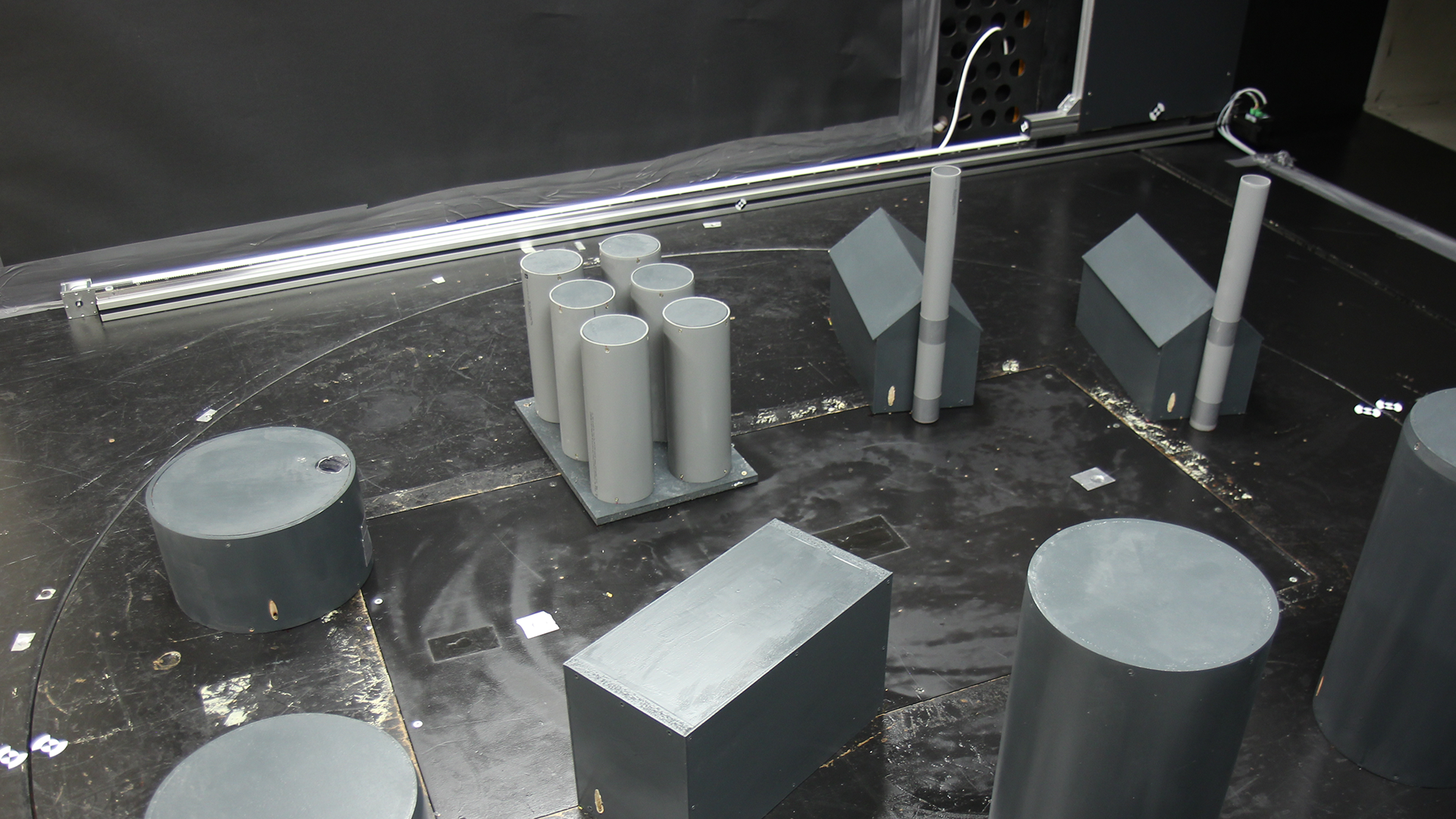
Verschiedene Objekte dienen als Miniaturmodelle von Gebäuden und Industrieanlagen. Sie stehen der Nebelwolke in Windrichtung im Weg und der Gas-Sensor-Array auf 3D-Volumen-Scanner erfasst die Wolke, um ihre Dynamik um Hindernisse herum zu charakterisieren.
Das DLR untersuchte in Windkanalexperimenten verschiedene Methoden, wie Roboter und Drohnen die Dynamik von Gasen in der Luft überwachen können.
Ziel der Forschung ist es, Daten zur Gasausbreitung in kontrollierten Umgebungen zu sammeln, um neue Methoden des maschinellen Lernens mit physikalischen Modellen zu kombinieren.
In Zukunft soll ein Netz autonomer Roboterplattformen gefährliche Gase lokalisieren, ihre Entwicklung in der Atmosphäre vorhersagen und so Einsatzkräfte unterstützen.
Bei einem Unfall mit gefährlichen Stoffen ist es für ein effektives Katastrophenmanagement unerlässlich, genau zu wissen, wie sich gesundheitsgefährdende Stoffe durch die Luft bewegen. Dieses Verständnis kann über Leben und Tod entscheiden und den Einsatzkräften helfen, schnell zu reagieren und richtige Maßnahmen zu ergreifen. Hier setzt ein Projekt des Deutschen Zentrums für Luft- und Raumfahrt (DLR) an: Durch den Einsatz autonomer Roboterschwärme werden innovative Lösungen zur Lokalisierung und Überwachung von Gasen in der Atmosphäre entwickelt. Modernste Methoden des maschinellen Lernens, kurz ML, werden mit physikalischen Modellen kombiniert, damit die Roboter und Drohnen die Dynamik von Gasen in der Luft autonom vorhersagen – in Zukunft im Schwarm, um möglichst große Gebiete zu erfassen. Nach den ersten Experimenten im Windkanal im März 2023, wurde die Versuchsreihe im September 2024 fortgesetzt und erfolgreich abgeschlossen.
Die Kernidee besteht darin, einen dezentralisierten Schwarm von Roboterplattformen zu schaffen, von denen jede mit Sensoren ausgestattet ist, mit denen sie die Ausbreitung von Chemikalien oder anderen Materialien in der Luft erkennen können – und das als bodenbasierte Systeme sowie als Drohnen im Flug. Indem sie zusammenarbeiten und Daten austauschen, könnten sie gemeinsam die Dynamik der gasförmigen Stoffe über große Gebiete hinweg verfolgen und so wichtige Informationen für Katastrophenschutzteams liefern.
Experimente im Windkanal – nicht nur in der Flugzeugforschung
Um die Vision Wirklichkeit werden zu lassen, führte das Team vom DLR-Institut für Kommunikation und Navigation eine Reihe von Experimenten im Windkanal in Marknesse in den Niederlanden durch. Windkanäle werden zwar in der Regel mit dem Testen von Flugzeugkonzepten oder anderen aerodynamischen Untersuchungen in Verbindung gebracht. Sie erweisen sich aber auch als sehr wertvoll für die Verbesserung der Fähigkeit von Robotern, Gase zu erkennen. Der Windkanal ermöglicht es im Gegensatz zu „traditionellen“ Windkanälen, die Modellexperimente bei sehr geringen Windgeschwindigkeiten durchzuführen. Diese sind für eine realitätsnahe, kontrollierte Testumgebungen nötig, um das Verhalten von Gas in einer Luftströmung und die Dynamik ihrer Ausbreitung und Konzentrationen experimentell zu untersuchen. Die kontrollierte Wolke im Windkanal mit seinen konstanten Windverhältnissen ist „quasi-stationär“, sodass die Forschenden die Dynamik ihrer Ausbreitung zeitindifferent untersuchen können. Dies ist wichtig, damit Messwerte an verschiedenen Orten trotz unterschiedlicher Messzeitpunkte in Relation zueinander gebracht werden können.
Die Experimente im Windkanal verfolgten mehrere Ziele
Kontrollierte Bedingungen für zuverlässige Ergebnisse Durch die Regulierung von Windgeschwindigkeit konnten die Verhaltensweisen von Gasen präzise untersucht werden. Diese Daten sind essenziell, um die Algorithmen zu optimieren.
Simulation realer Herausforderungen In der Praxis begegnen Rettungskräfte komplexen Bedingungen wie dichtem Rauch oder turbulenter Luft. Der Windkanal erlaubt die Nachbildung solcher Szenarien und hilft, die Sensoren und Modelle darauf abzustimmen.
Sicherheitsaspekte Der Einsatz des Windkanals ermöglicht sichere Experimente mit „Spielgasen“, die reale Bedingungen nachahmen, jedoch keine Gefahr darstellen.
Vergleich von Sensortechnologien Verschiedene Sensoren wurden unter identischen Bedingungen getestet, um deren Eignung für unterschiedliche Anwendungen zu bewerten.
Im Windkanal simulierten die Wissenschaftlerinnen und Wissenschaftler, wie sich Gase in der Atmosphäre ausbreiten und wie sich die Turbulenzen rund um eine Drohne auf die Sensoren an Bord auswirken. Die Ergebnisse sollen den Grundstein für eine neue Generation von autonomen Robotern legen, die gefährliche Umgebungen erforschen und Echtzeitdaten für die Katastrophenhilfe liefern.
Eine Schlüsselinnovation des Projekts liegt in der Kombination modernster Techniken des maschinellen Lernens mit physikalischen Modellen, wie sich verschiedene Gase in der Luft verbreiten. Diese Verknüpfung soll es den Robotern nicht nur im Verbund ermöglichen, Vorhersagen über die Umgebung zu treffen. Gleichzeitig ist es das Ziel, den Bedarf an großen Mengen von Trainingsdaten zu reduzieren, deren Erfassung oft teuer und zeitaufwändig ist. Sie sollen so angelernt werden, dass sie sich später auch ohne umfangreiche weitere Trainingsdaten an neue Umgebungen anpassen können.
Roboter „sehen“ gut, das „Riechen“ fällt ihnen schwer
Wer an autonome Roboter denkt, hat meist futuristische Maschinen oder die Rover aus der Planetenexploration vor Augen. Diese sind mit hochentwickelten Kameras ausgestattet, mit denen sie ihre Umgebung „sehen“, analysieren und mit ihr interagieren. Dank der Fortschritte in der Kameratechnologie und der künstlichen Intelligenz können Rover zum Beispiel den Mars mit bemerkenswerter Unabhängigkeit erkunden. Sie generieren riesige Datenmengen, die in Algorithmen einfließen und es den Robotern ermöglichen, in Echtzeit zu lernen und ihr Verhalten anzupassen.
Im Gegensatz zu Kameras, die hochauflösende Echtzeitdaten aus der Nähe und auch über große Entfernungen hinweg liefern, stehen nicht-visuelle Sensoren – also solche, die beispielsweise chemische Verbindungen in der Luft „riechen“ sollen – oft vor Hürden. Viele chemische Sensoren bieten nur Messungen aus ihrer ganz unmittelbaren Umgebung. Außerdem haben diese Sensoren im Vergleich oft langsamere Reaktionszeiten und geringere Aktualisierungsraten. Diese Einschränkungen machen die autonome Erkundung von nicht-visuellen Umweltfaktoren zu einer großen Herausforderung.
High-Tech-Ansätze zur Datenerfassung in Windkanalversuchen
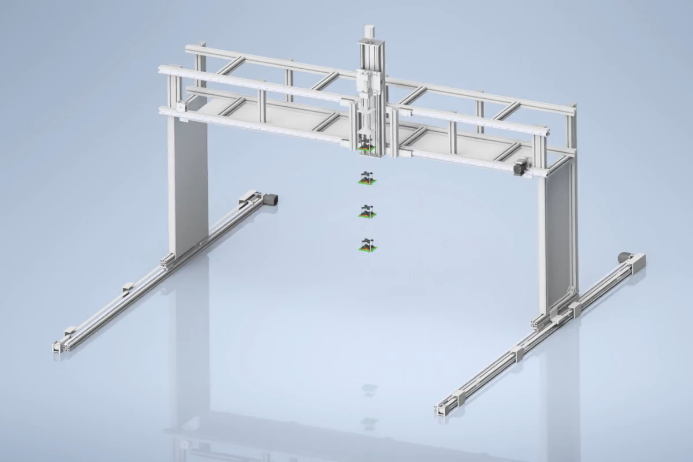
Schematische Darstellung der 3D-Volumen-Scanner mit montiertem Gas Sensor Array
Der 3D-Volumen-Scanner führt den in der Mitte montierten Sensor Array mit vier Sensoreinheiten durch die Gaswolke im Windkanal. Sie fährt vor und zurück, bewegt den Scanner nach links und rechts sowie auf drei Stufen nach oben und unten.
Für die Experimente wurde unter anderem ein innovativer 3D-Volumen-Scanner entwickelt, der Sensoren auf mehreren Ebenen im Raum millimetergenau positioniert. Der Scanner ermöglicht die Vermessung einer Gaswolke in hoher räumlicher Auflösung. Modelle von beispielsweise Gebäuden und Industrieanlagen wurden auf dem Boden positioniert, um die Charakteristik der Ausbreitung und Konzentration des Gases um Hindernisse herum zu untersuchen. Die Ergebnisse liefern die wichtige Datenbasis zur Validierung physikalischer und theoretischer Modelle der Gasausbreitung.
In einem der Experimente erfasste der Scanner die aus einer kontrollierten Methanquelle entweichende Wolke aus verschiedenen Winkeln und analysierte verschiedene Abtastmuster per Laser. Dieser maß die Methankonzentration durch spezifische Lichtabsorption, selbst bei geringen Mengen des Treibhausgases.
Die Messdrohne im Anflug an die Gasquelle
Im Clip gut zu erkennen ist, wie die Rotoren der Drohne die Luft verwirbeln – und es den Messsensoren dadurch teilweise unmöglich macht, korrekte Messdaten zu erfassen. Bei den Windkanalversuchen untersucht das DLR-Forschungsteam unter anderem, welche Stellen der Drohnen besser geeignet sind als andere, Gaskonzentration und Windstärke zu erfassen. Auch sollen später Korrektur-Algorithmen entwickelt werden, um die Messfehler durch die Abwinde direkt aus den Messdaten herauszurechnen.
In einer weiteren Versuchsreihe untersuchte das Team die Rolle von Drohnen für die Detektion von Gasen und ihrer Konzentration in der Luft. Drohnen bieten ein enormes Potenzial für den Einsatz in gefährlichen Umgebungen, allerdings können die von ihren Rotoren erzeugten Abwind-Strömungen, der sogenannte Downwash-Effekt, die Messungen stark beeinflussen. Ausgestattet mit Sensoren zur Messung der Windströmung sowie für die Gasdetektion, wurde die Drohne im Windkanal in die Nebelwolke geführt. Dadurch wurden die Gaskonzentration und Windmuster an der Drohne gemessen.
Ein weiteres Experiment widmete sich der Detektion von Gaslecks mit einem Lasersensor. Der Lasersensor erfasste die entweichende Spielgaswolke seitlich aus der Distanz. Er tastete sie aus verschiedenen Winkeln ab und analysierte verschiedene Abtastmuster. Die Gaskonzentration per Laser gelingt aufgrund der spezifischen Lichtabsorption eines Gases bei unterschiedlichen Konzentrationen – und das selbst bei geringen Mengen eines Gases wie beispielsweise des Treibhausgases Methan.
Neben dem DLR-Institut für Kommunikation und Navigation ist auch das Institut für Flugführung am DLR-Standort Braunschweig im Projekt aktiv: Die Forschenden tragen zu einem konkreten Anwendungsbeispiel bei, bei dem mehrere Multikopter eines heterogenen Schwarmes in einem unbekannten Gebiet möglichst effizient Gasquellen lokalisieren. Das Institut ist dabei für die autonome Missionsplanung der eingesetzten Drohnen und für die Neuplanung der Flugwege während der laufenden Mission zuständig.
Nächste Schritte auf dem Weg zum autonomen Roboterschwarm in der Katastrophenhilfe
Die im Projekt gesammelten Daten werden nun aufbereitet und der Wissenschaftsgemeinschaft zugänglich gemacht, um die Forschung im Bereich Umweltüberwachung und Katastrophenmanagement voranzutreiben. Die Fachkenntnisse und Daten aus dem Projekt werden in ein weiteres DLR-Projekt einfließen, bei dem mehrere DLR-Institute gemeinsam an einem Messkonzept arbeiten, um die Klimawirkung einer zukünftigen Wasserstoffwirtschaft abzuschätzen. In einem Arbeitspaket wird die Expertise aus der DLR-Atmosphärenphysik im Bereich der atmosphärischen Sensorik auf größere Entfernungen durch die laserbasierte Ferndetektion des DLR-Teams der Technischen Physik vervollständigt. Und die Forschenden der Physik der Atmosphäre werden an der Verbesserung der Computermodelle zur Gasausbreitung arbeiten. Das Team der Kommunikation und Navigation widmet sich der Verbindung von beidem auf den robotischen Plattformen: Wohin muss sich welcher Roboter hinbewegen, der mit welchen Sensoren ausgestattet ist? Für diese und ähnliche, hochkomplexe Fragestellungen bedarf es der Entwicklung von Algorithmen für die Koordination der Roboter untereinander. Im Schwarm sollen sie autonom die aktuellen Messwerte analysieren und entscheiden, wie sie sich für die optimale Erfassung einer sich dynamisch verändernden Wasserstoffwolke positionieren.



{kind=link}
{kind=link}
{kind=link}