
Rollin' Justin kehrt die Scherben einer zerbrochenen Tasse
{kind=link}

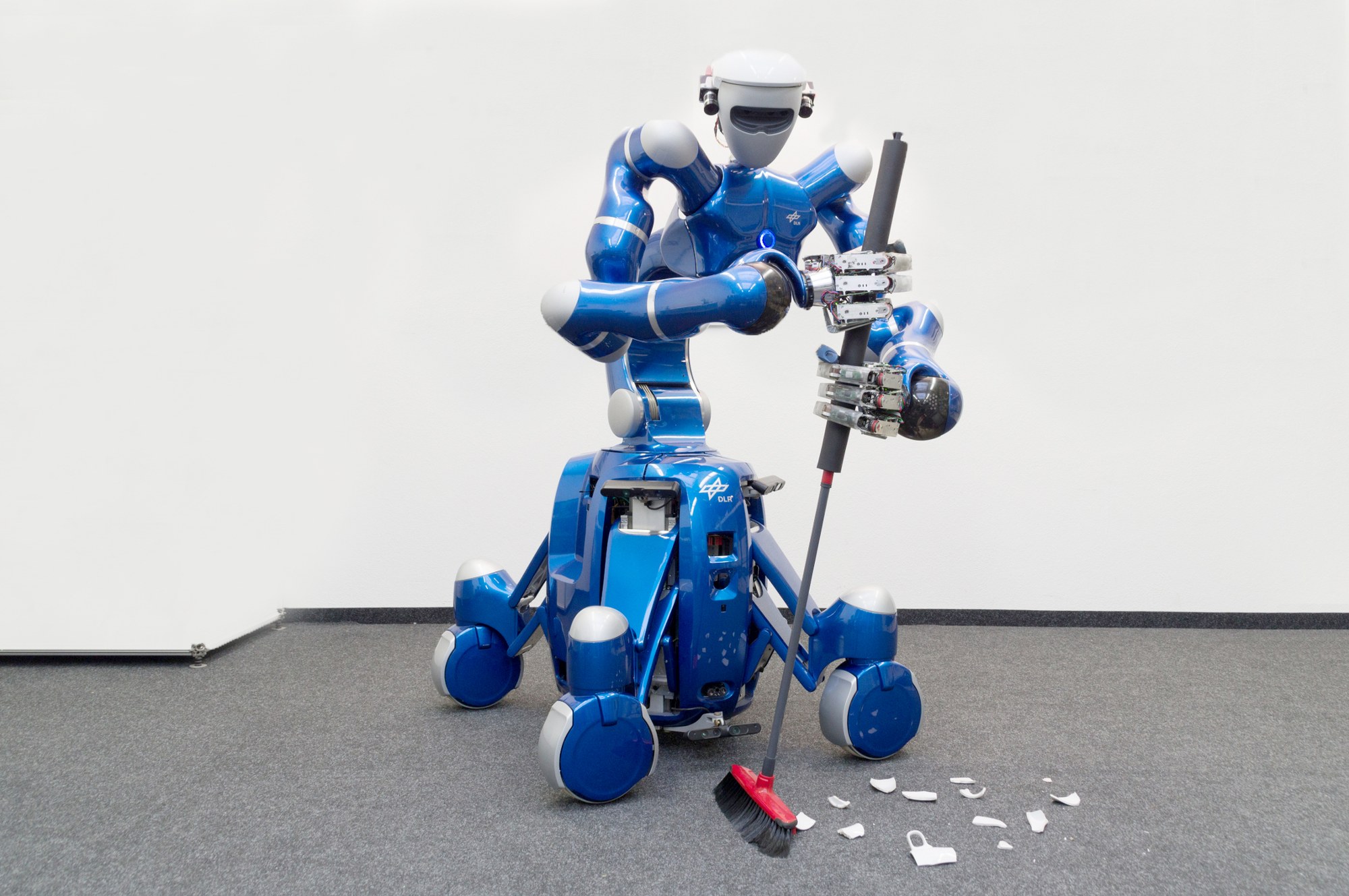
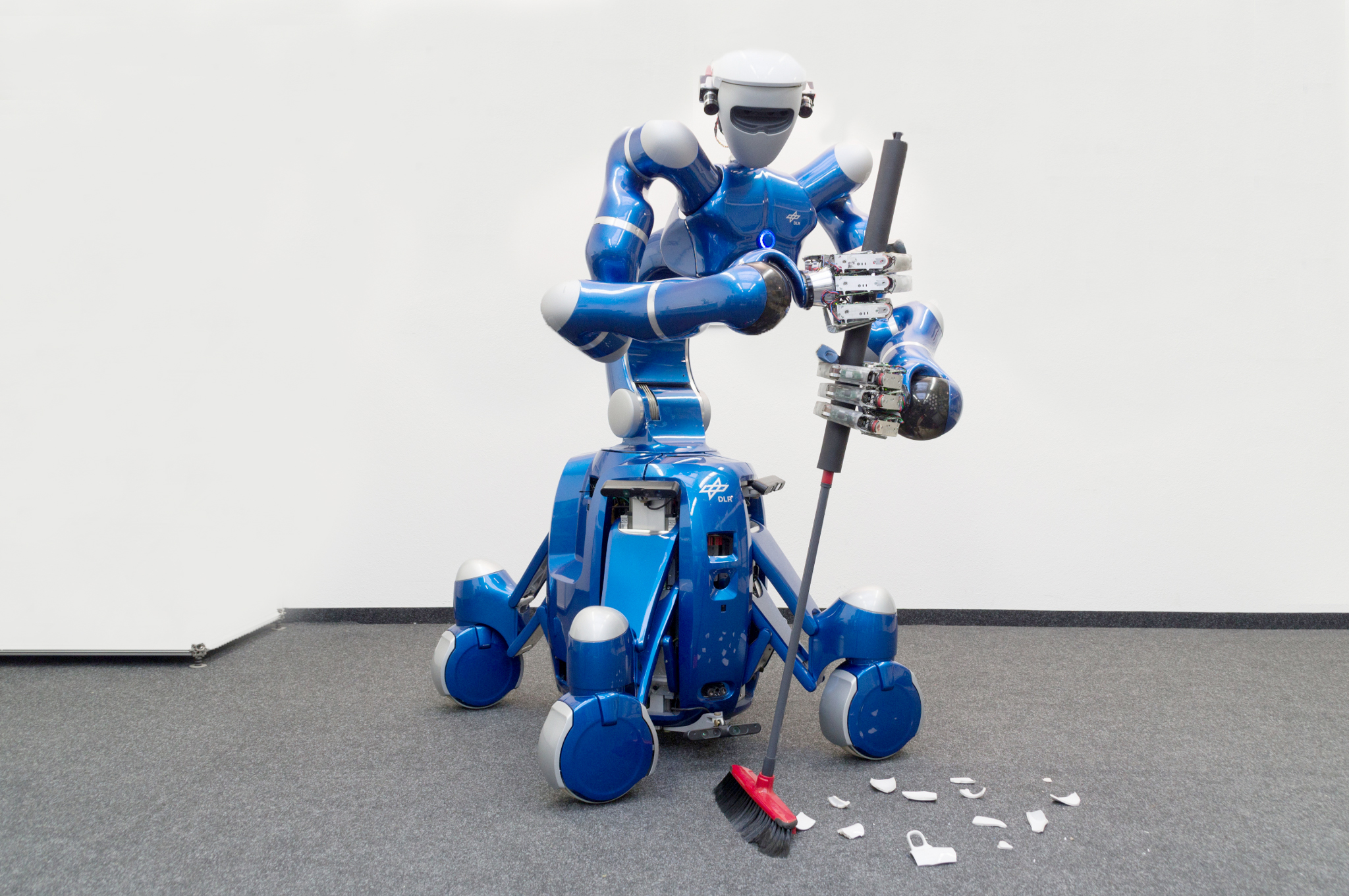
Rollin' Justin kehrt die Scherben einer zerbrochenen Tasse
Die Arbeiten rund um Rollin' Justin umfassen die Untersuchung nachgiebiger Ganzkörperbewegungen und deren Effekte auf die Umgebung. Konkret werden dazu alltägliche Haushaltsaufgaben wie Fenster wischen, Kehren oder Staubsaugen untersucht.
{kind=link}