Artikel aus DLRmagazin 171: Auf dem Ätna wie auf dem Mond demonstrieren Roboter Zusammenarbeit während der ARCHES-Mission
Ein Team für alle Fälle
Herz der Mission
Assistent und Wissenschaftler: LRU2 (Leightweight Rover Unit 2, links) und LRU1 bei ihrer gemeinsamen Mission auf dem Vulkan Ätna in Sizilien.
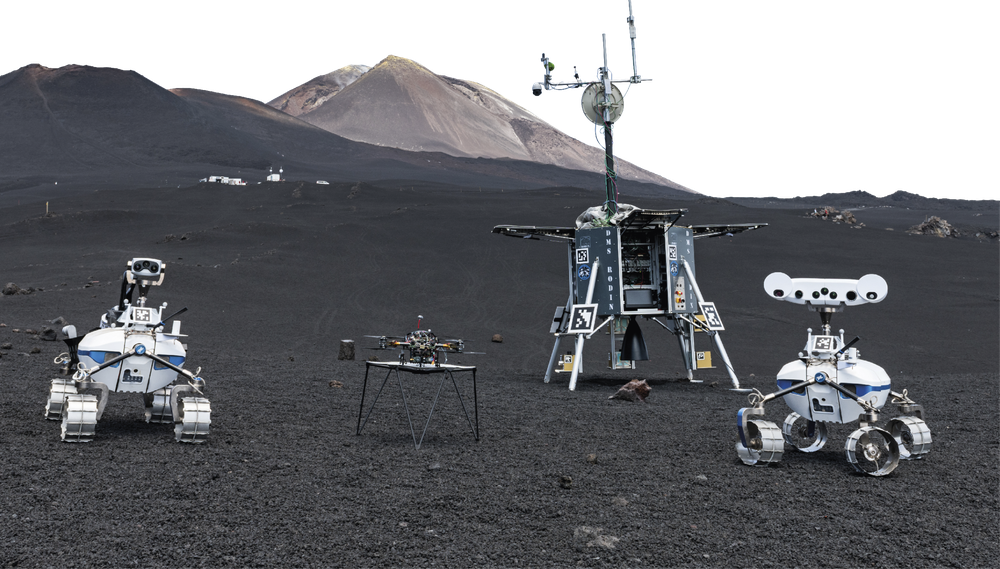
Die Rollen sind klar verteilt. Und jeder macht das, was er am besten kann: der Wissenschaftler, der Assistent, die Kundschafterin, der Versorger, der Höhlenforscher. Keiner ist allein, sie arbeiten im Team und unterstützen sich gegenseitig. Das gemeinsame Ziel von LRU1, LRU2, Ardea, Rodin und Scout: unbekannte Welten entdecken. Das haben die Roboter und der Lander jetzt geübt. Sie waren dazu in einer der unwirtlichsten Gegenden, die man sich in Europa aussuchen kann – am Vulkan Ätna.
Der Boden ist dunkelgrau, die porösen Lavasteinchen knirschen bei jedem Schritt, entfernt steigt Rauch auf. Der Ätna auf der italienischen Insel Sizilien ist seit 60.000 Jahren fast pausenlos aktiv. An seiner Südflanke hat er eine karge Landschaft mit Hügeln und Senken geschaffen, so weit das Auge reicht. Wissenschaftlerinnen und Wissenschaftler sehen hier Ähnlichkeiten mit dem Mond. „Die Landschaft eignet sich gut als Testumgebung“, sagt Dr. Armin Wedler vom DLR-Institut für Robotik und Mechatronik in Oberpfaffenhofen. „Die lose, grobkörnige Oberfläche und auch die erstarrten Lavaschichten sind absolut realistische Herausforderungen für Erkundungsmissionen.“ Die Mission am Ätna schließt das Projekt ARCHES (Autonomous Robotic Networks to Help Modern Societies) ab, in dem seit 2018 vernetzte robotische Systeme entwickelt wurden. Jetzt zeigen sie ihre Fähigkeiten.
Der Wissenschaftler
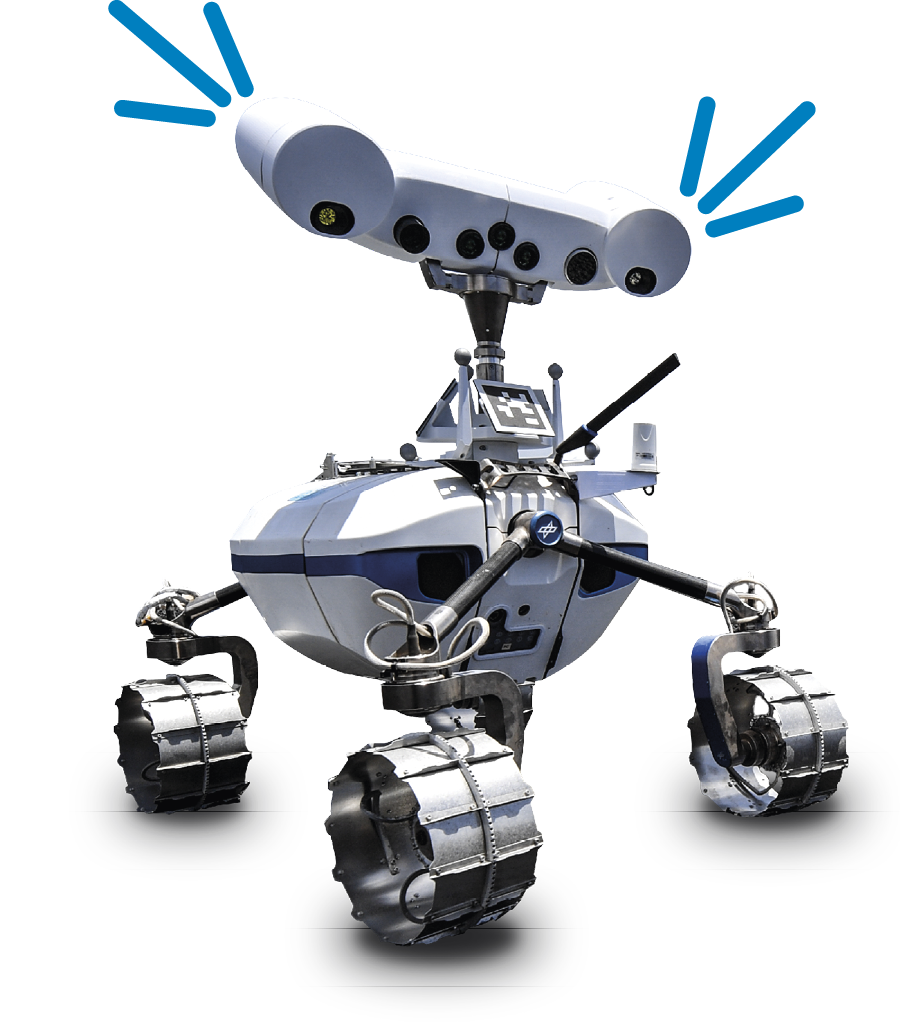
LRU1 (Lightweight Rover Unit 1) macht sich auf den Weg. Er hat seine vier Räder in Position gedreht und rollt zügig los. Menschen auf zwei Beinen haben erste Schwierigkeiten, Schritt zu halten, weil der Boden nachgibt und die Luft in 2.600 Metern Höhe merklich dünner wird. Menschen sehen auch nicht so gut wie LRU1, der in seinem flachen breiten Kopf sieben „Augen“ hat. Eigentlich werden Menschen hier überhaupt nicht gebraucht. LRU1 kommt selbstständig in seinem Roboter-Team klar, trifft Entscheidungen und erledigt seinen Auftrag. Für den ist allerdings ein Mensch verantwortlich. Projektleiter Armin Wedler ergänzt:„Die Roboter sind und bleiben verlängerter Arm und verlängertes Auge der Menschen.“ Diese könnten in jenem Szenario allerdings sehr weit entfernt sein: Zwischen Erde und Mond liegen rund 384.400 Kilometer. Zwischen Erde und Mars sogar mindestens 50 Millionen Kilometer.
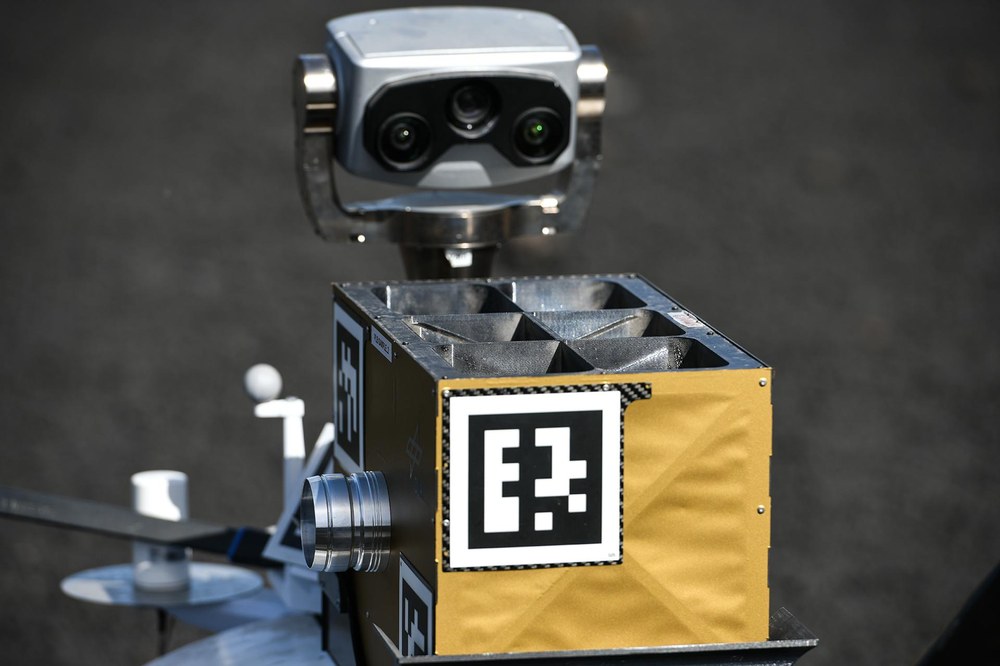
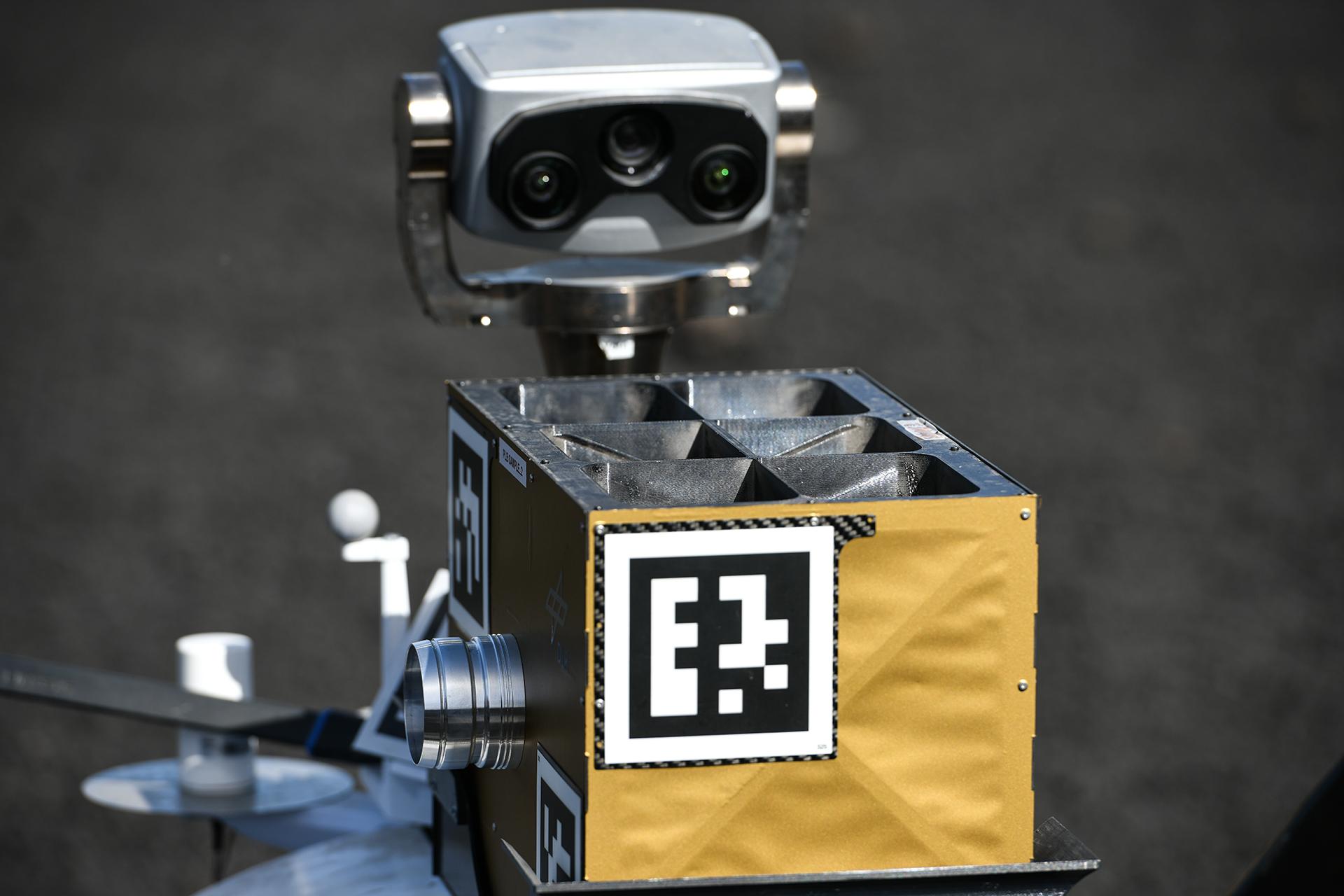
LRU1 gilt als der Wissenschaftler. Zunächst schaut er sich um, immer auf der Suche nach interessanten Stellen. Die drei Kameras in der Kopfmitte haben ähnliche Aufgaben wie menschliche Augen. Zwei davon bilden ein Stereokamerasystem mit Graustufen, eine ist eine Farbkamera. Mit ihnen kann LRU1 dreidimensional sehen und sich selbst lokalisieren. „Eine besondere Herausforderung liegt darin, zuvor besuchte Orte in der grauen Vulkanlandschaft wiederzuerkennen, um sich an ihnen zu orientieren“, erklärt Dr. Martin Schuster vom Institut für Robotik und Mechatronik. Eine vierte Kamera hat ein Teleobjektiv für größere Entfernungen, eine Thermalkamera misst Temperaturunterschiede. Mit den beiden Kameras ganz außen kann LRU1 über Filterräder unterschiedliche Frequenzbereiche wahrnehmen. „So kann er beispielsweise Gesteinstypen voneinander unterscheiden, die für den Menschen farblich gleich aussehen“, sagt Martin Schuster. Die Filterräder sind recht groß und bescheren LRU1 die charakteristische Kopfform.
„Sie agieren als Team, aber sind trotzdem eigenständig. Die Spezialisierung mit mehreren kleineren Systemen hat den Vorteil, dass das Gesamtteam trotzdem weiterfunktioniert, auch wenn ein Teil ausfällt.“
Peter Lehner, DLR-Institut für Robotik und Mechatronik
Bei seiner Arbeit ist er mit bis zu vier Kilometer pro Stunde unterwegs. Seine vier leichten Räder mit flexiblen Titanspeichen steuert er einzeln, er kann seinen Körper kippen und an Schrägen das Gleichgewicht halten. Alles, was vor Ort sofort entschieden werden muss, berechnet er mit seinem Onboard-Computer. LRU1 hat keine Arme. Auch wenn es aussieht, als würde er fröhlich winken – der schwarze Stab an seiner Vorderseite ist eine Antenne. Die Roboter sind über WLAN miteinander verbunden. „Sie agieren als Team, aber sind trotzdem eigenständig. Die Spezialisierung mit mehreren kleineren Systemen hat den Vorteil, dass das Gesamtteam trotzdem weiterfunktioniert, auch wenn ein Teil ausfällt“, sagt Peter Lehner vom Institut für Robotik und Mechatronik.
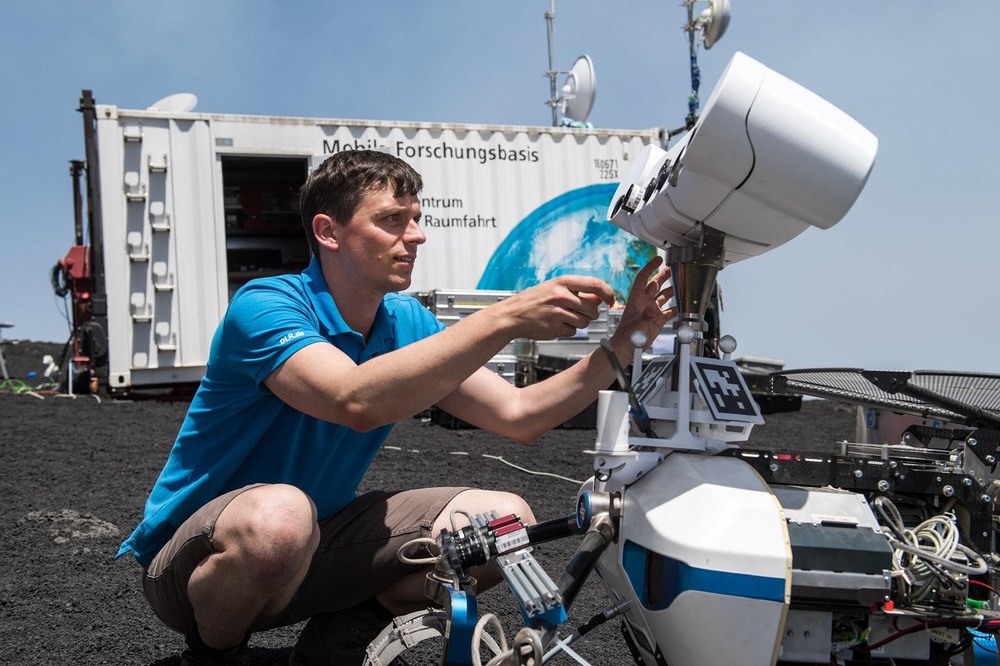
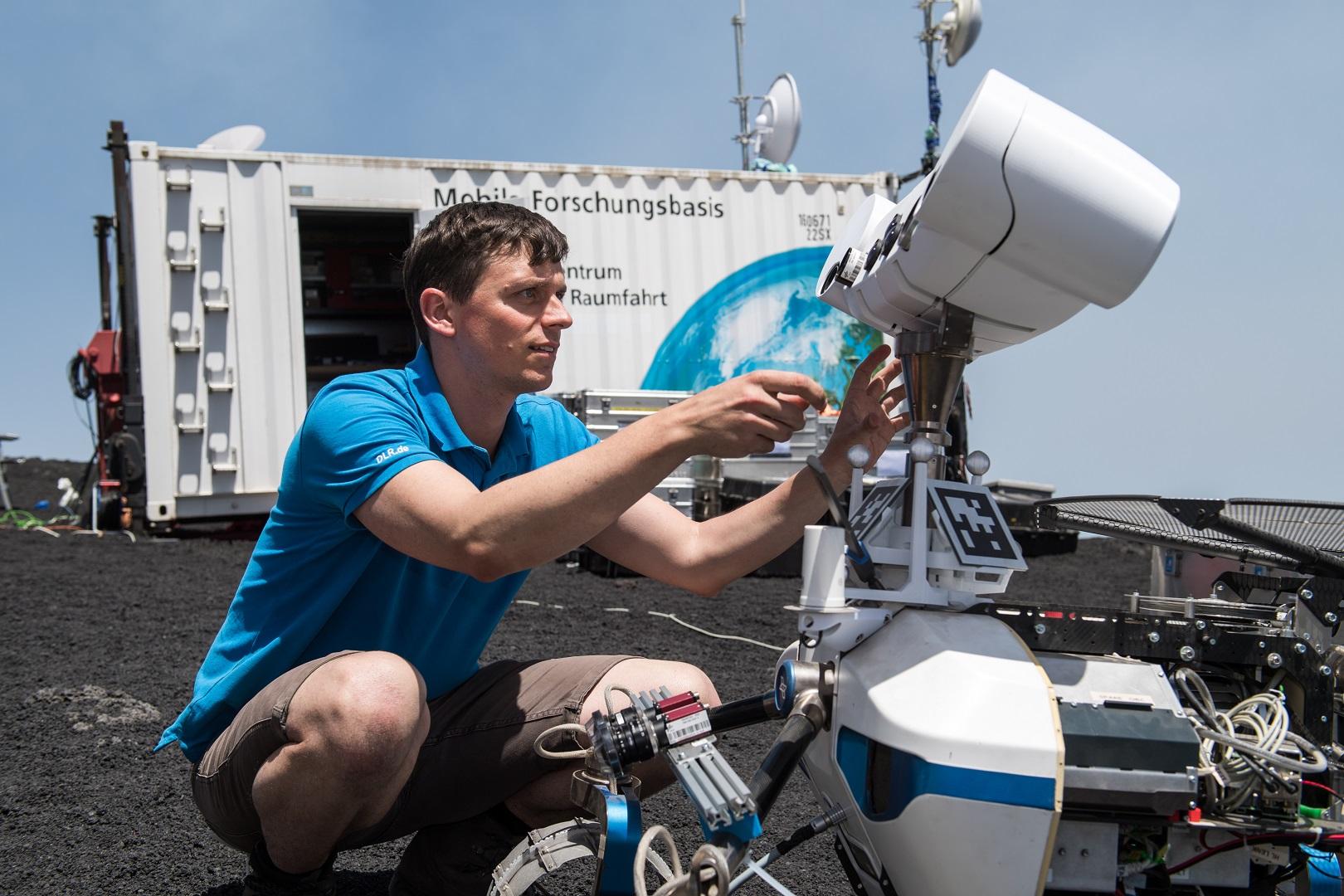
Letzte Handgriffe an LRU1
Die letzten Vorbereitungen im Basecamp am Ätna – dann legt Roboter LRU1 los. In seinem Kopf befinden sich mehrere Kamerasysteme. Mit den Filterrädern ganz außen nimmt er zum Beispiel unterschiedliche Frequenzbereiche wahr.
LRU2 ist von gleicher Statur, aber mit steiferen Rädern, die ihm eine hohe Genauigkeit beim Greifen erlauben. Er hat einen Arm mit sechs Gelenken, beziehungsweise „Freiheitsgraden“. Das ist einer weniger als bei einem menschlichen Arm. Dafür können sich seine Gelenke unbegrenzt drehen. Der „Assistent“ LRU2 packt sich Instrumente oder Gesteinsproben auf den Rücken. Er entscheidet selbst, ob er dafür eine Hand, einen Greifer oder eine Schaufel nimmt. Das Werkzeug hat er stets griffbereit. „Ein Faktor bei Erkundungsmissionen ist die Fähigkeit, mit beschränkten Ressourcen umgehen zu können“, erklärt Andreas Dömel vom Institut für Robotik und Mechatronik. „Und die größte Herausforderung besteht darin, dem Roboter möglichst vielseitige Fähigkeiten mit auf die Mission zu geben. Man weiß nie genau, womit man es zu tun bekommt.“ LRU2 arbeitet deswegen mit einer Art Baukastensystem. Was er gerade braucht, holt er sich vom Lander Rodin: Batteriepakete, Payload-Boxen für Gesteinsproben, Elemente eines Antennensystems oder das LIBS-Instrument für Analysen.
„Die größte Herausforderung besteht darin, dem Roboter möglichst vielseitige Fähigkeiten mit auf die Mission zu geben.“
Andreas Dömel, DLR-Institut für Robotik und Mechatronik
LIBS bedeutet Laser-Induced Breakdown Spectroscopy (Laser-induzierte Plasmaspektroskopie) und ist eine sehr heiße Angelegenheit: Wenn LRU2 die LIBS-Box auf einen Stein ausrichtet, schießt der leistungsstarke, gepulste Laser ein Miniloch von einigen Mikrometern Breite und Tiefe hinein. Das Material verdampft. Dabei entsteht für den Bruchteil einer Sekunde eine kleine Menge Plasma. „Der Dampf wird ionisiert. Das heißt, die Atomkerne verlieren durch die Laserenergie ein oder mehrere Elektronen. Wenn die frei gewordenen Elektronen mit Atomen, Ionen oder Molekülen im Plasma kollidieren, können sie diese zum Leuchten anregen und es zeigt sich eine charakteristische Farbe“, erklärt Fabian Seel vom DLR-Institut für Optische Sensorsysteme. Mit einem Spektrometer lassen sich die Farben ablesen. Weil unterschiedliche Elemente unterschiedliche Farben im Plasma erzeugen, wissen die Forschenden anschließend, welche Elemente sich in dem Stein befinden. Im ÄtnaLavagestein wurden mit dem LIBS-Instrument zum Beispiel die Signale von Kalium, Kalzium, Natrium und Silizium gefunden. Weil die Farben der Elemente bekannt und immer gleich sind – egal ob auf Erde, Mond oder Mars – kann man mit LIBS auch fremde und entlegene Orte auf ihre elementare Zusammensetzung erkunden. Auf dem Mars werden LIBS-Instrumente schon von NASA-Rovern eingesetzt, um die lokale Geochemie und damit die Entstehungsgeschichte zu studieren. „Mit LIBS können wir bei Missionen aber auch gezielt nach Elementen suchen“, ergänzt Dr. Susanne Schröder vom Institut für Optische Sensorsysteme. Zu wissen, was wo besonders häufig vorkommt, ist wichtig, wenn es etwa um einen dauerhaften Aufenthalt von Menschen auf dem Mond geht und Ressourcen vor Ort genutzt werden sollen. LIBS könnte in Zukunft noch viel weiter hinaus als Mond und Mars – die optische Technologie ist für jeden planetaren Körper geeignet, sogar für die Eismonde von Jupiter oder Saturn.
Alle Roboter tragen „Namensschilder“ mit kleinen schwarz-weißen Quadraten. Über diese erkennen sie sich gegenseitig und wissen genau, wo sich die anderen gerade aufhalten. Boxen mit Antennenelementen wurden am Ätna so exakt platziert, dass sie sich zu einem Teleskop zusammenschalten konnten. Das Szenario heißt LoFar (Low Frequency Array). Auch sie sind mit entsprechenden Schildern ausstaffiert. LRU1 hat die Gegend analysiert, LRU2 die Boxen verteilt. „Auf der erdabgewandten Seite des Mondes könnten Teleskopeinheiten großflächig angeordnet werden. Sie können von dort den Radiobereich des elektromagnetischen Spektrums nach möglichen Anzeichen von außerirdischen Zivilisationen durchsuchen“, erklärt Dr. Emanuel Staudinger vom DLR-Institut für Kommunikation und Navigation.
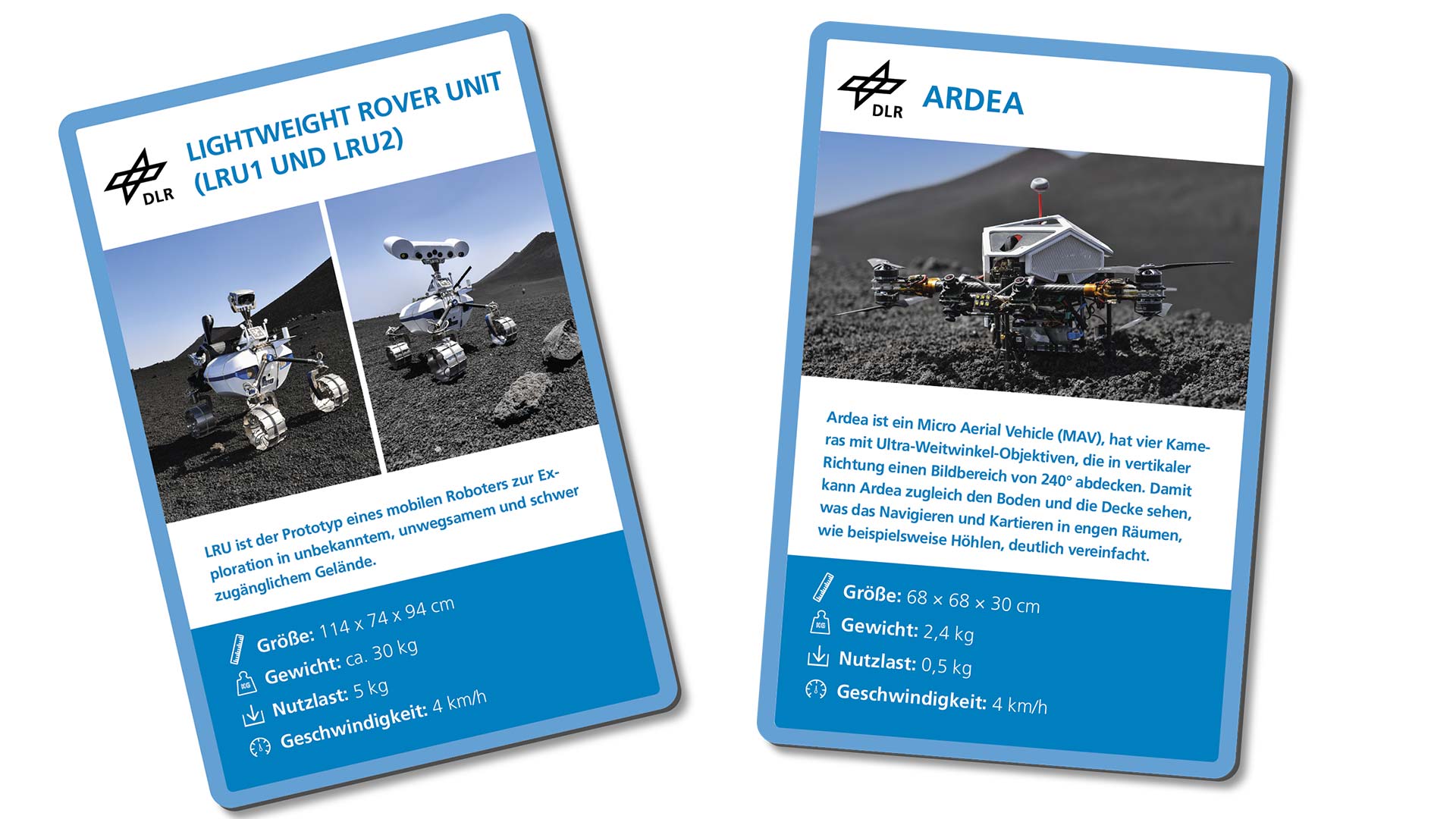
Die Drohne Ardea ist die Schnellste im Team bei der Erforschung des Unbekannten. Sie fliegt gerne in zwei bis drei Metern Höhe, kartiert und analysiert unterwegs, ob die Strecke für die großen Roboter geeignet ist. Die Daten verarbeitet sie in Echtzeit. Wenn Ardea ihr O.K. gibt, folgt das Team. Nachfragen bei Menschen wären bei einem Einsatz etwa auf dem Mars gar nicht möglich: „Es würde viel zu lange dauern, die Daten auf die Erde zu schicken, zu bewerten und Aufträge zurückzusenden“, sagt Marcus Müller vom Institut für Robotik und Mechatronik. In der Zwischenzeit könnte ein Hindernis auftauchen. Oder schlimmstenfalls einer der Kollegen in die Flugbahn geraten. Deswegen fliegt Ardea komplett autonom.
Sie sieht mit vier Kameras, die Stereopaare bilden, und hat einen vertikalen Blickwinkel von 240 Grad. „Das ist nicht nur praktisch für die Erkundung von Oberflächen. Ardea findet sich sogar in Höhlen oder Lava-Tubes zurecht und kann dort 3DKarten erstellen“, erklärt Marcus Müller weiter. Weil ihre Reichweite begrenzt ist, stellt LRU1 ihr eine sichere Landeplattform auf seinem Rücken zur Verfügung.
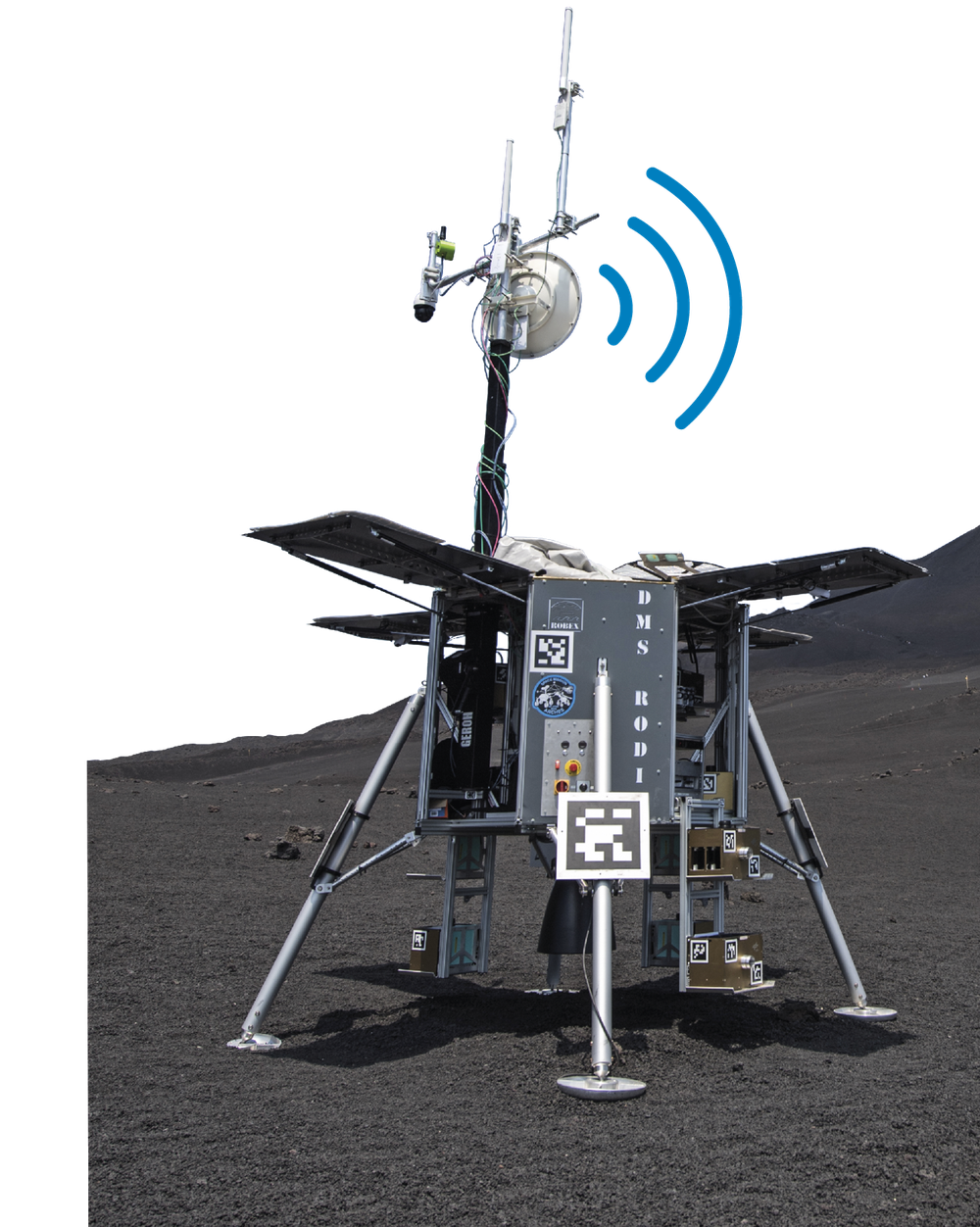
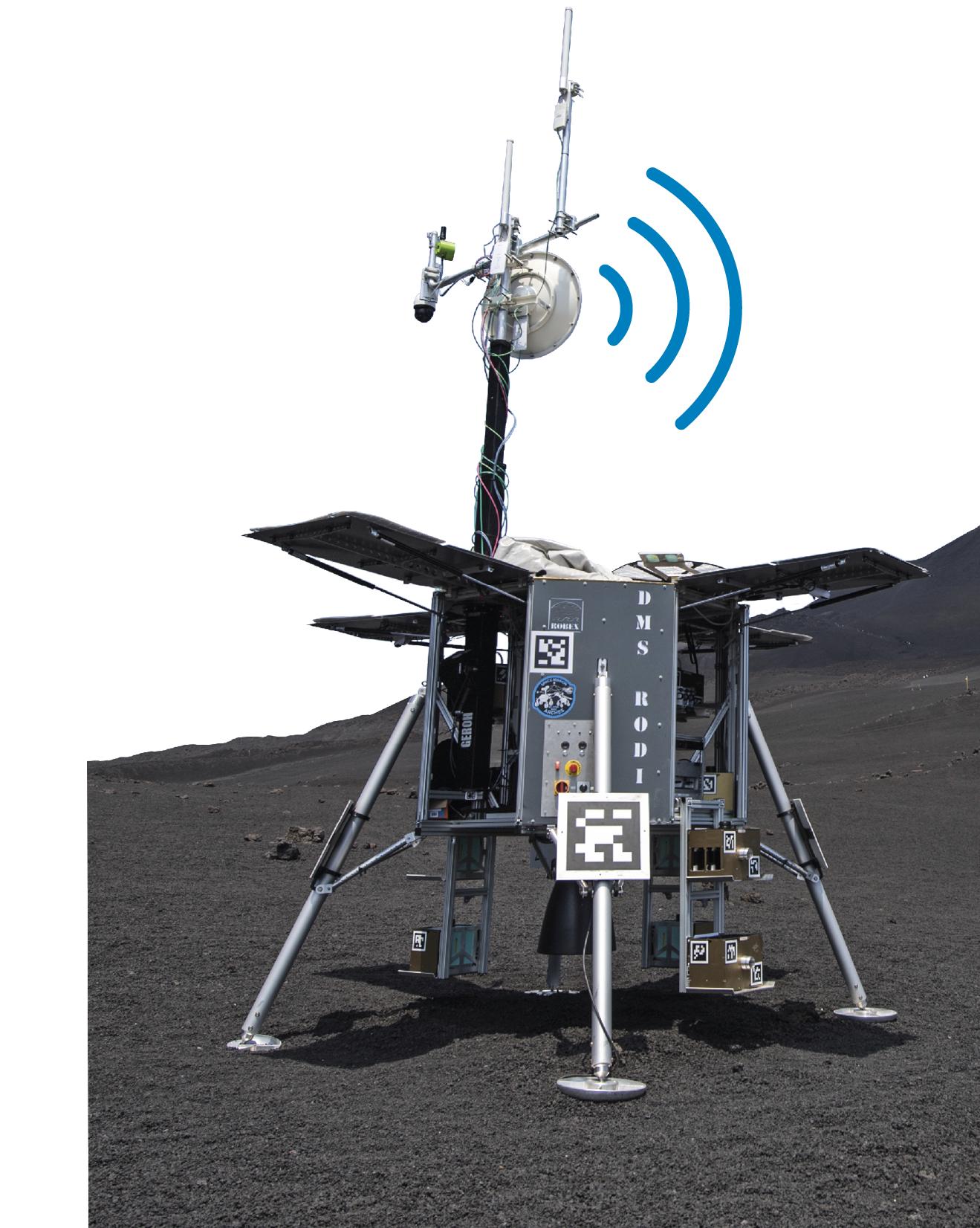
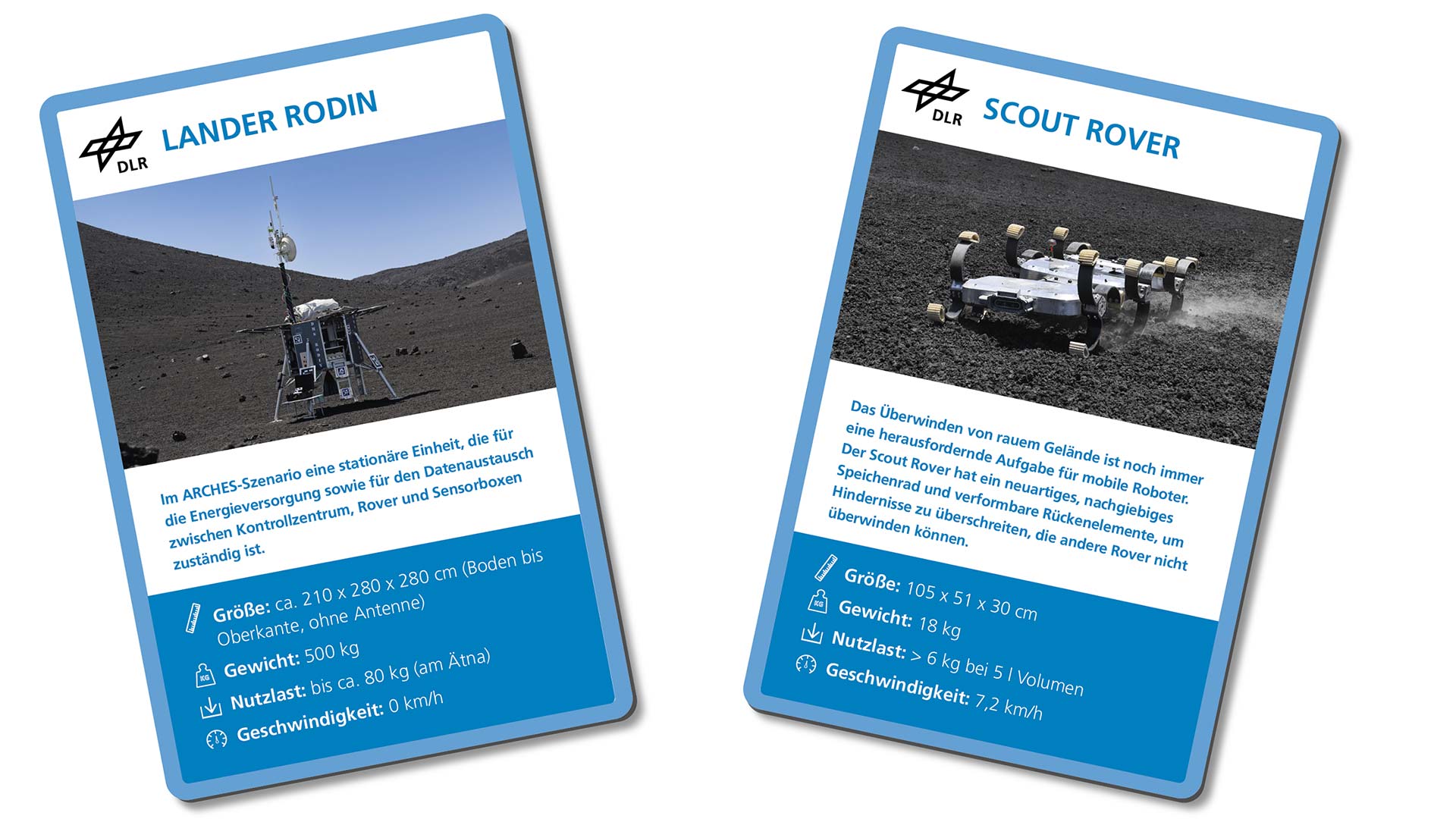
Und wenn sie gemeinsam eine Aufgabe abgeschlossen haben? Wenn der Akku leer ist oder die Box für die Gesteinsproben voll? Dann steht Rodin bereit. Der Lander klappt seine Sonnensegel auf, bietet Energie und Kommunikation, lagert die Boxen. „Rodin ist wie ein großer Bruder, der auf alles aufpasst. Er ist der ruhende Pol und der Mittelpunkt des Teams“, sagt Bernhard Vodermayer vom Institut für Robotik und Mechatronik. Mittelpunkt ist durchaus wörtlich zu nehmen – bei den Erkundungen orientieren sich die Roboter an Rodin, um die Verbindung zu halten. Er ist nicht nur mit seinem Team in Kontakt, sondern auch mit den Wissenschaftlerinnen und Wissenschaftlern auf der Erde beziehungsweise im Basecamp. Ein vergleichbares Modell könnte bei einer Weltraummission eingesetzt werden. Die Düse unter dem Lander würde dann das Aufsetzen auf extraterrestrischem Untergrund abbremsen. Auf den Ätna kam er noch im Container – und mit viel (menschlicher) Muskelkraft.
„Rodin ist wie ein großer Bruder, der auf alles aufpasst. Er ist der ruhende Pol und der Mittelpunkt des Teams.“
Bernhard Vodermeyer, DLR-Institut für Robotik und Mechatronik
Scout sieht aus wie ein Insekt und bewegt sich wie ein Känguru. Er hüpft nicht sehr hoch, aber das Prinzip ist identisch: Federnde Elemente in den Beinen speichern Energie und unterstützen dann aktiv die Fortbewegung. Manche Beobachter oder Beobachterinnen am Ätna finden es „süß“, wie Scout umher„läuft“. Dr. Roy Lichtenheldt vom DLR-Institut für Systemdynamik und Regelungstechnik ist für ihn verantwortlich und erklärt: „Manchmal kommt er einem vor wie ein Haustier.“ Geplant war das nicht – die technischen Möglichkeiten und die Funktionen standen bei der Entwicklung immer im Vordergrund. Es gab Vorbilder: Der dreigeteilte Körper mit sechs Beinen „ist stark von Insekten inspiriert“, sagt Roy Lichtenheldt. Die nachgiebige „Wirbelsäule“ ist eher Säugetieren nachempfunden. Wenn es gefährlich wird, ist Scout in seinem Element. Falls er stürzt und auf dem Rücken landet, dreht er sich oder läuft einfach weiter. Er klettert über Hindernisse, die bis zu 40 Zentimeter hoch sind, und schleppt bis zu sechs Kilo Ladung. Mit diesen Fähigkeiten ist Scout eigentlich ein hervorragender robotischer Höhlenforscher. Am Ätna hatte er einen anderen Spezialauftrag: Er trug bei einem Experiment einen WLAN-Repeater und positionierte sich selbstständig immer so, dass die anderen Roboter problemlos in Verbindung bleiben konnten. Ein echtes Teammitglied eben.
Viele Fähigkeiten vereint
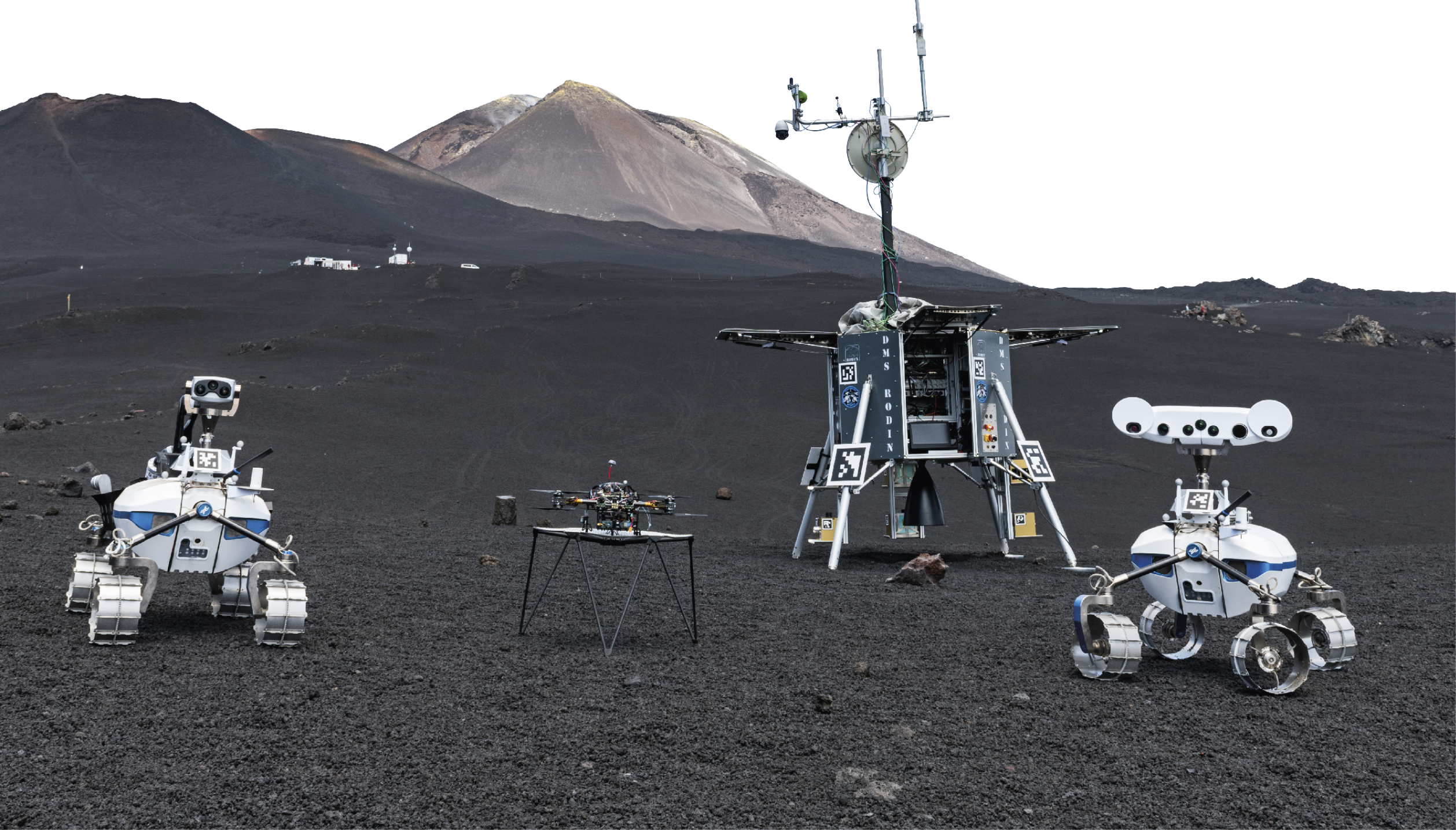
Die karge Landschaft am Ätna hat Ähnlichkeit mit der Mondoberfläche. Hier waren LRU2, Ardea, Rodin, LRU1 (von links) und Scout im Einsatz. Im Hintergrund das Basecamp des DLR, das für die Mission eingerichtet wurde.
Im Helmholtz-Zukunftsprojekt ARCHES (Autonomous Robotic Networks to Help Modern Societies) werden seit 2018 heterogene, autonome, vernetzte robotische Systeme entwickelt. Nicht nur die Roboter sind unterschiedlich, sondern auch die Anwendungsfelder. Neben der Erkundung des Sonnensystems sind zum Beispiel die Umweltüberwachung der Ozeane und die Unterstützung bei Krisen auf der Erde möglich. Die Demomission „Space“, die im Juni und Juli 2022 auf dem Ätna stattfand, musste wegen der Corona-Pandemie mehrmals verschoben werden.
Neben dem DLR-Institut für Robotik und Mechatronik sind die Institute für Systemdynamik und Regelungstechnik, für Kommunikation und Navigation sowie für Optische Sensorsysteme an ARCHES beteiligt. Die DLR Einrichtung Raumflugbetrieb und Astronautentraining hat mit der mobilen Raketenbasis MORABA einen Kommunikationslink zwischen „Bodenstation“ und Ätna hergestellt sowie die Netzwerkinfrastruktur betrieben.
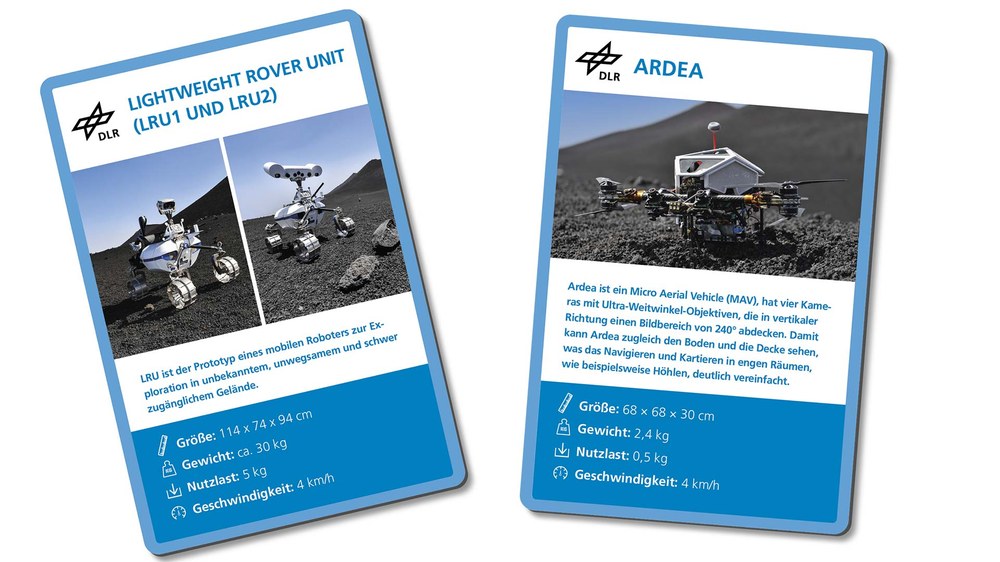
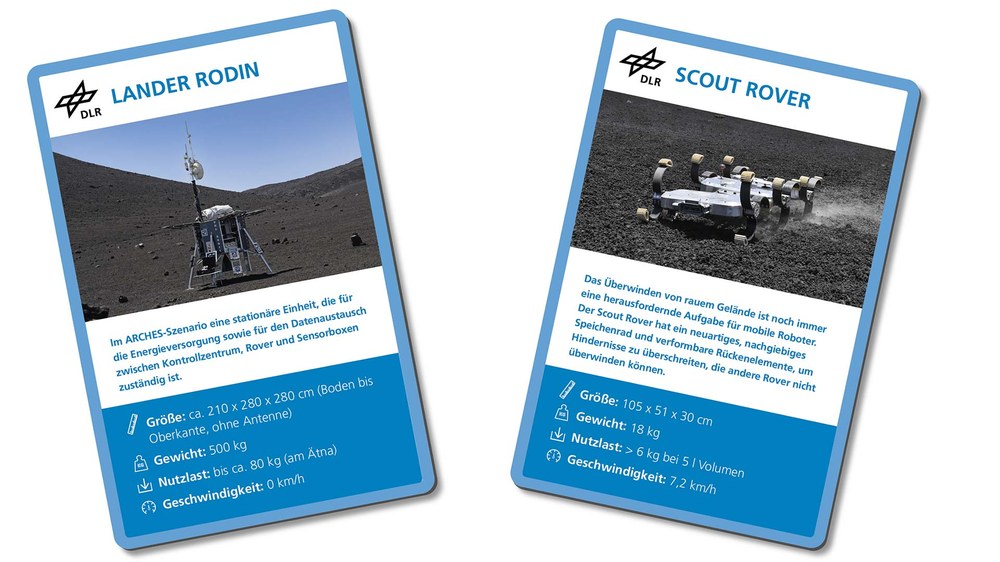
Daten und Fakten zu Roboter, Drohne und Lander
LRU1, LRU2 und Ardea im Überblick
Mit den Quartett-Karten lassen sich die Merkmale der ARCHES-Roboter leicht merken.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}