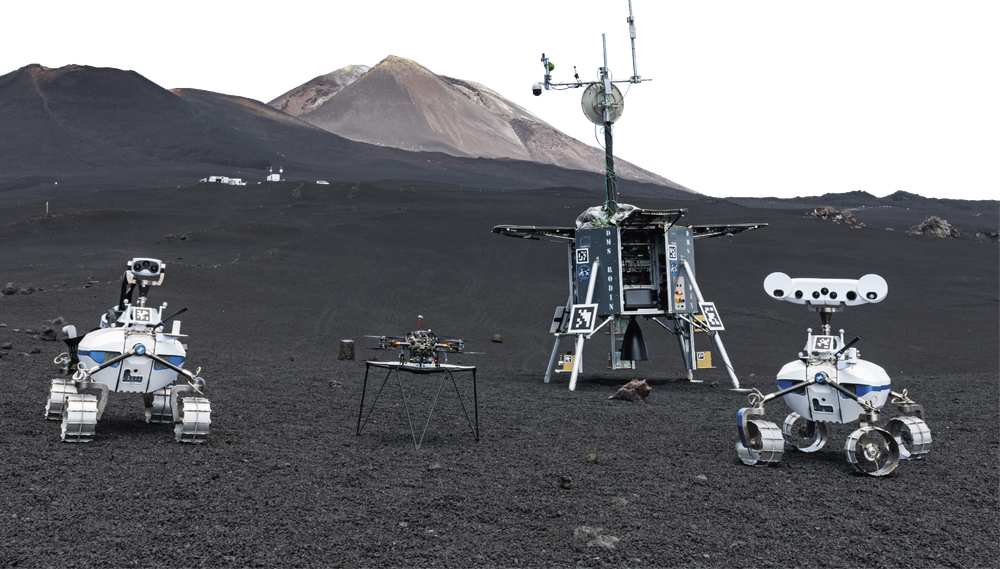
The scientist, the assistant, the pathfinder, the supplier, the cave explorer – the roles are clear. LRU1, LRU2, Ardea, Rodin and Scout share the common goal of exploring uncharted territory. They all do what they are best at, and they always work as a team. The robots and the lander have now practised doing just that in one of the least hospitable places in Europe – Mount Etna.
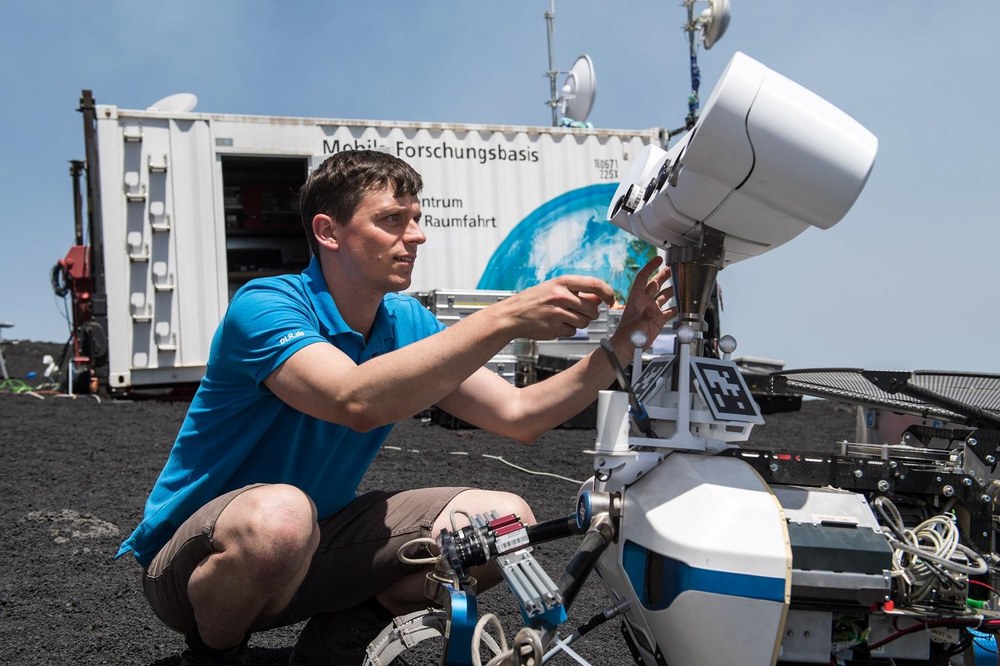
Blackened soil, porous lava rocks that crunch with every step and smoke that rises in the distance. This volcano, on the Italian island Sicily, has been active almost continuously for 60,000 years. On its southern flank, Mount Etna's volcanic activity has created a barren landscape with hills and depressions as far as the eye can see. Here, scientists find similarities between the volcano and the Moon. "The landscape is highly suitable as a test environment," says Armin Wedler of the DLR Institute of Robotics and Mechatronics in Oberpfaffenhofen. "The loose, coarse-grained surface and the solidified lava layers pose remarkably realistic challenges for reconnaissance missions." The Etna mission marks the culmination of the ARCHES project (Autonomous Robotic Networks to Help Modern Societies), which has been developing networked robotic systems since 2018. The time has come for them to show what they can do.
The scientist
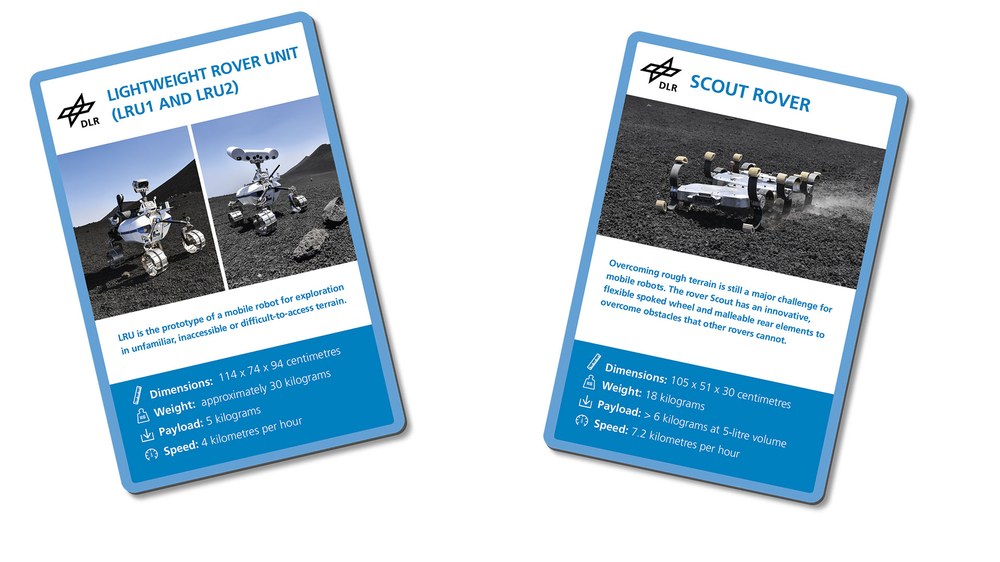
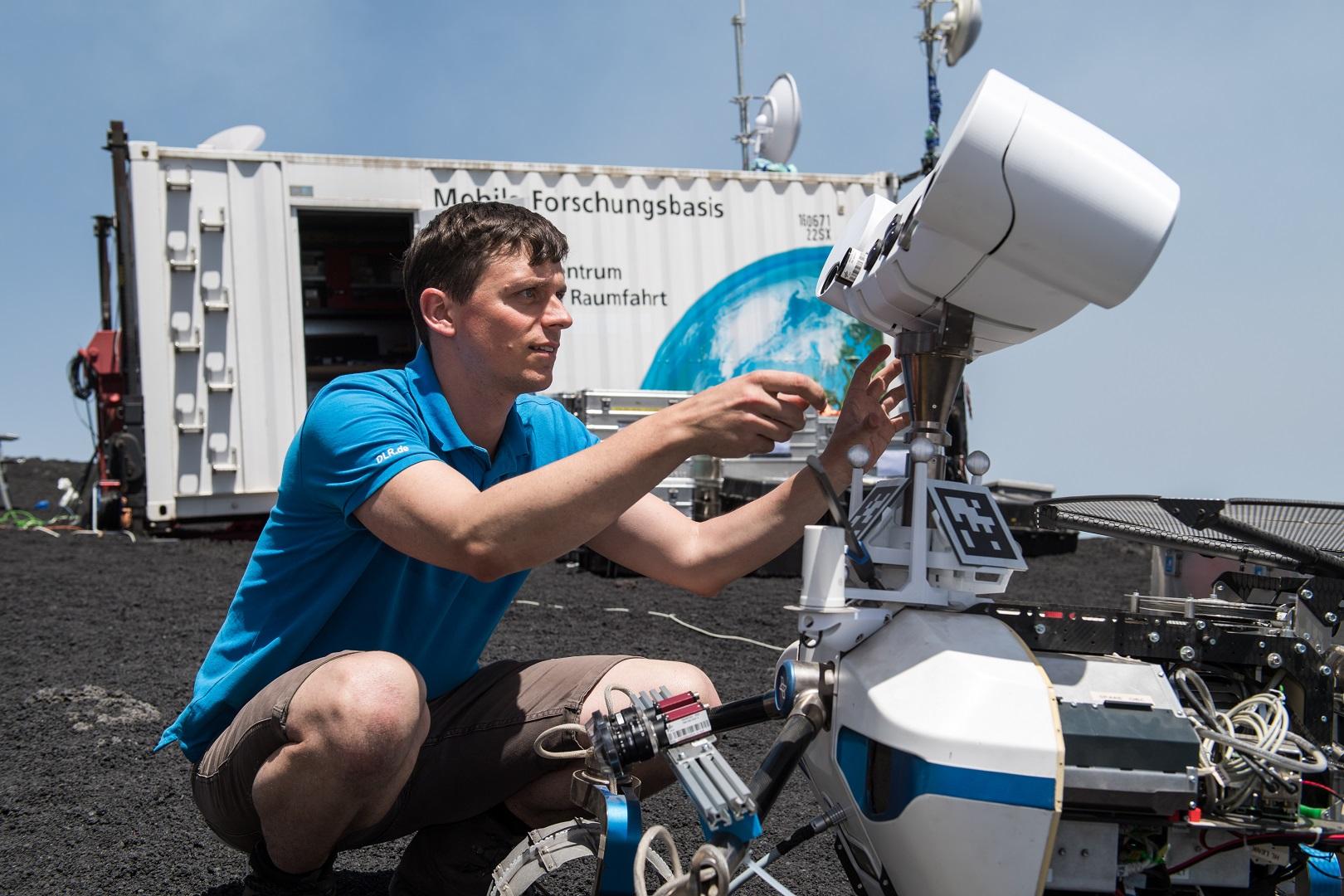
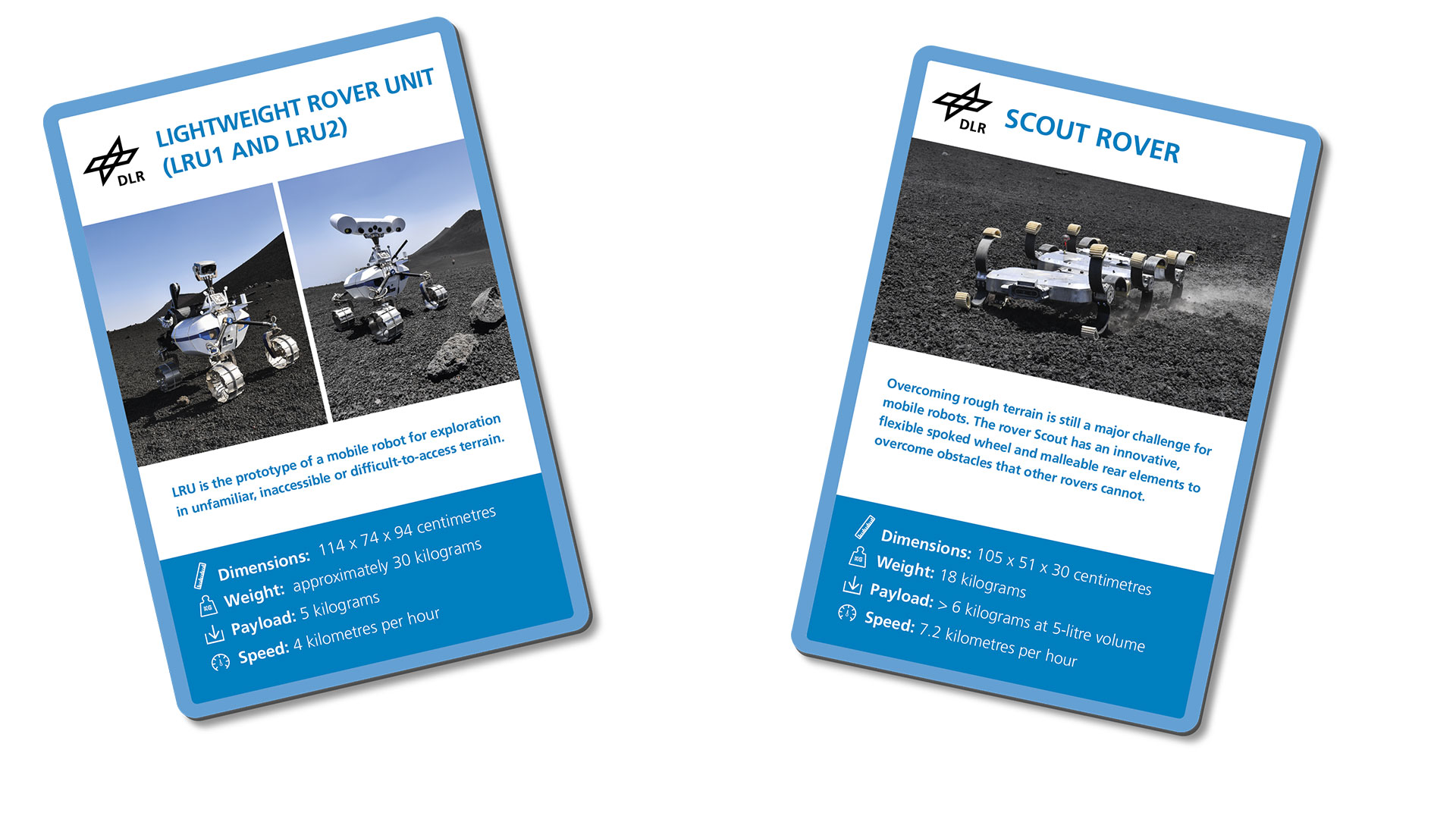
LRU1 (Lightweight Rover Unit 1) takes off. Turning its four wheels into position, it starts rolling along. People have difficulty keeping up with it on foot because the ground is so soft, and, at 2600 metres, the air gets noticeably thinner. Humans do not see as well as LRU1, either, as it has seven 'eyes' in its flat, broad head. In fact, there is not much need for people here at all: LRU1 works independently within its robot team, makes decisions and carries out its mission. A person is still responsible for the process, however: "The robots are and will continue to be an extension of the human arm and eye," says Wedler, who manages the project. Humans and the robots could end up very far apart: the Moon is 384,400 kilometres from Earth, while Mars is more than 50 million kilometres away.
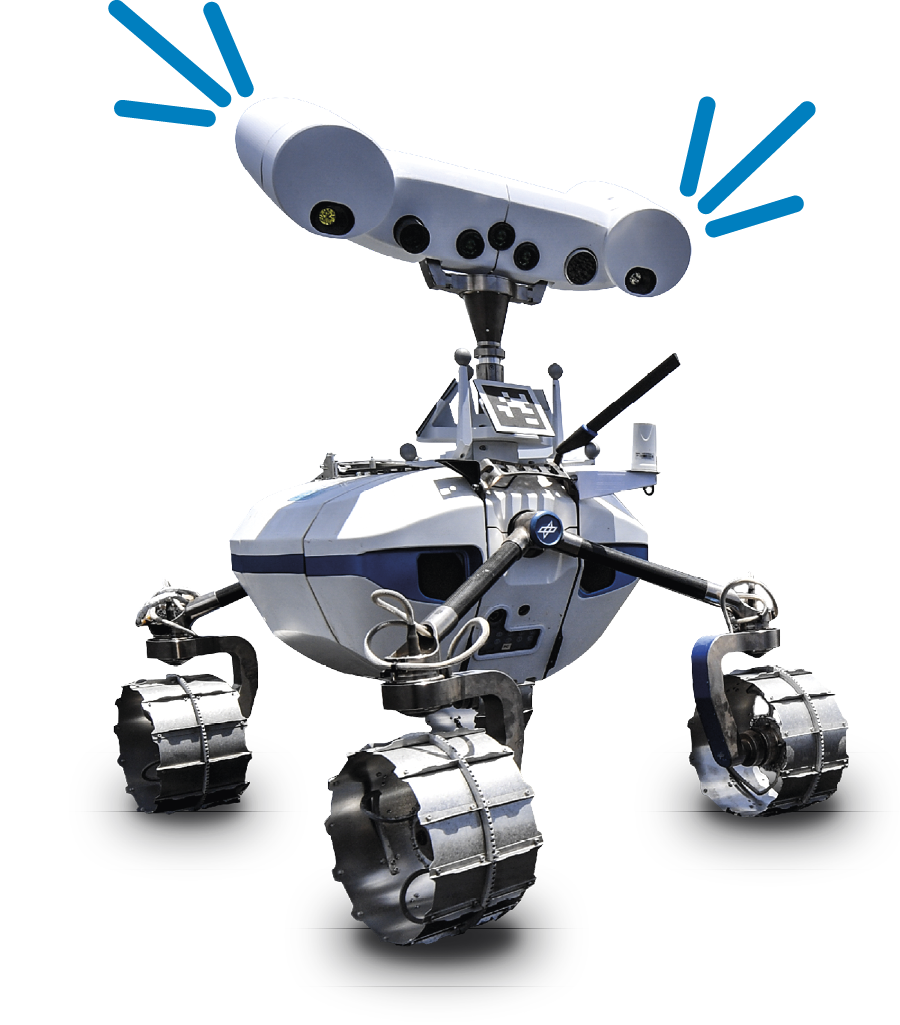
LRU1 – The scientist
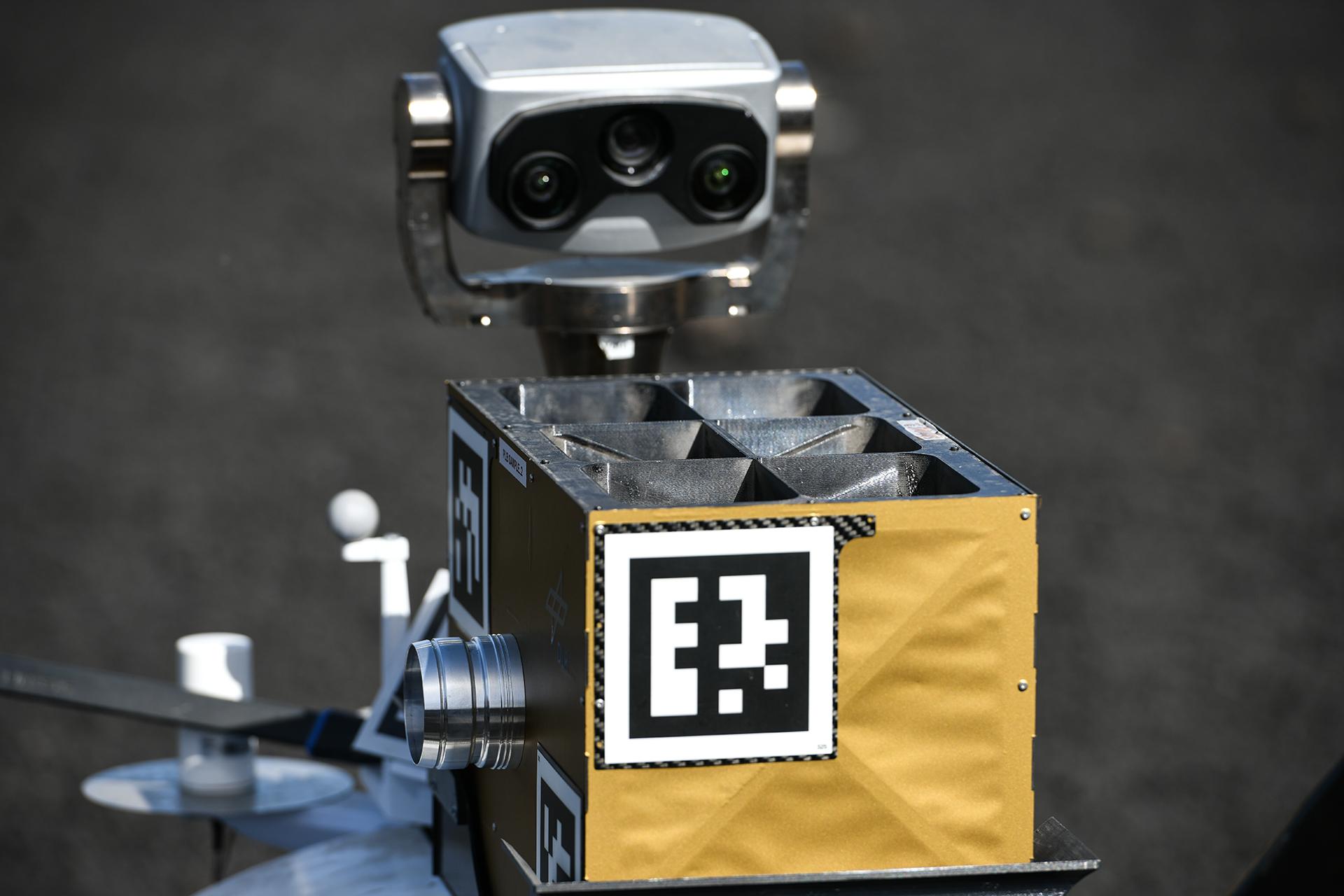
Several camera systems are mounted on its head. With the exterior filter wheels it recognises different frequency ranges.
In this team, LRU1 is the scientist. It begins a mission by looking around, seeking out promising positions. The three cameras in the middle of its head perform a task similar to human eyes. Two of them form a greyscale stereo camera system, while the other is a colour camera. LRU1 uses them to see in three dimensions and pinpoint its location. "One particular challenge is recognising previously visited places in the grey volcanic landscape and orienting itself accordingly," explains Martin Schuster of the Institute of Robotics and Mechatronics. A fourth camera has a telephoto lens for longer distances, while a thermal camera measures temperature differences. The two exterior cameras enable LRU1 to perceive different frequency ranges using filter wheels. "For instance, it can distinguish between rock types that look the same to humans," Schuster says. The large filter wheels give the LRU1 its characteristic head shape.
"The robots act as a team, but remain independent. Having several smaller systems has the advantage that the entire team can go on functioning even if one part fails."
Peter Lehner, DLR Institute of Robotics and Mechatronics
While working, it travels at up to four kilometres per hour. It controls its four light wheels individually with flexible titanium spokes, allowing it to tilt its body and maintain its balance on slopes. Everything that needs to be decided immediately on site is calculated using the onboard computer. Although LRU1 has no arms, it sometimes appears to be waving merrily thanks to the black antenna at its front. The robots connect to each other via WiFi. "They act as a team, but remain independent," says Peter Lehner of the Institute of Robotics and Mechatronics, adding: "Having several smaller systems has the advantage that the entire team can go on functioning even if one part fails."
LRU2 – Lightweight Rover Unit 2 – is a bit tougher. It has the same structure as LRU1, but is more powerful, with sturdier titanium wheels. It has an arm with six degrees of freedom – just one less than a human arm – allowing for a considerable range of movement. Its joints can rotate indefinitely. LRU2 carries instruments or rock samples on its back and can decide whether to use a hand, a gripper or a shovel for a task. It always has a tool at hand. "One factor in reconnaissance missions is the ability to deal with limited resources," says Andreas Dömel of the Institute of Robotics and Mechatronics. "The biggest challenge is to give the robot as many different skills as possible on a mission. You never know exactly what you will be dealing with."
"The biggest challenge is to give the robot as many different skills as possible on a mission."
Andreas Dömel, DLR Institute of Robotics and Mechatronics
LRU2 works with a kind of modular system. Whatever it needs, it gets from the Rodin lander: battery packs, payload boxes for rock samples, elements of an antenna system or the laser-induced breakdown spectroscopy (LIBS) system. LIBS is 'hot stuff'. When LRU2 points the LIBS box at a rock, the pulsed laser shoots a mini hole a few micrometres wide and deep. The material vaporises, creating a small amount of plasma for a fraction of a second. "The steam is ionised, which means that the atomic nuclei lose one or more electrons due to the laser energy," says Fabian Seel of the DLR Institute of Optical Sensor Systems. "When the released electrons collide with atoms, ions or molecules in the plasma, they can excite them to glow, and a distinctive colour appears." The colours can be registered by a spectrometer. As different elements produce different colours in the plasma, the researchers learn which elements are in the rock.
LRU2 works with a kind of modular system. Whatever it needs, it gets from the Rodin lander: battery packs, payload boxes for rock samples, elements of an antenna system or the laser-induced breakdown spectroscopy (LIBS) system. LIBS is 'hot stuff'. When LRU2 points the LIBS box at a rock, the pulsed laser shoots a mini hole a few micrometres wide and deep. The material vaporises, creating a small amount of plasma for a fraction of a second. "The steam is ionised, which means that the atomic nuclei lose one or more electrons due to the laser energy," says Fabian Seel of the DLR Institute of Optical Sensor Systems. "When the released electrons collide with atoms, ions or molecules in the plasma, they can excite them to glow, and a distinctive colour appears." The colours can be registered by a spectrometer. As different elements produce different colours in the plasma, the researchers learn which elements are in the rock.
The LIBS instrument picked up signals for potassium, calcium, sodium and silicon in Etna's lava rock. The colours of the elements are known and always the same whether on Earth, the Moon or Mars, so LIBS can be used to examine the elemental composition of unfamiliar and remote places. NASA rovers are already using LIBS instruments on Mars to study the local geochemistry and thus the history of the planet's formation. "We can also use LIBS to search for specific elements during missions," adds Susanne Schröder of the Institute of Optical Sensor Systems. Knowing what is particularly common where is important if, for instance, people are ever going to stay on the Moon for long periods and use locally available resources. In the future, LIBS could go much farther than the Moon and Mars, as the optical technology is suitable for use on any planetary body – even the icy moons of Jupiter or Saturn.
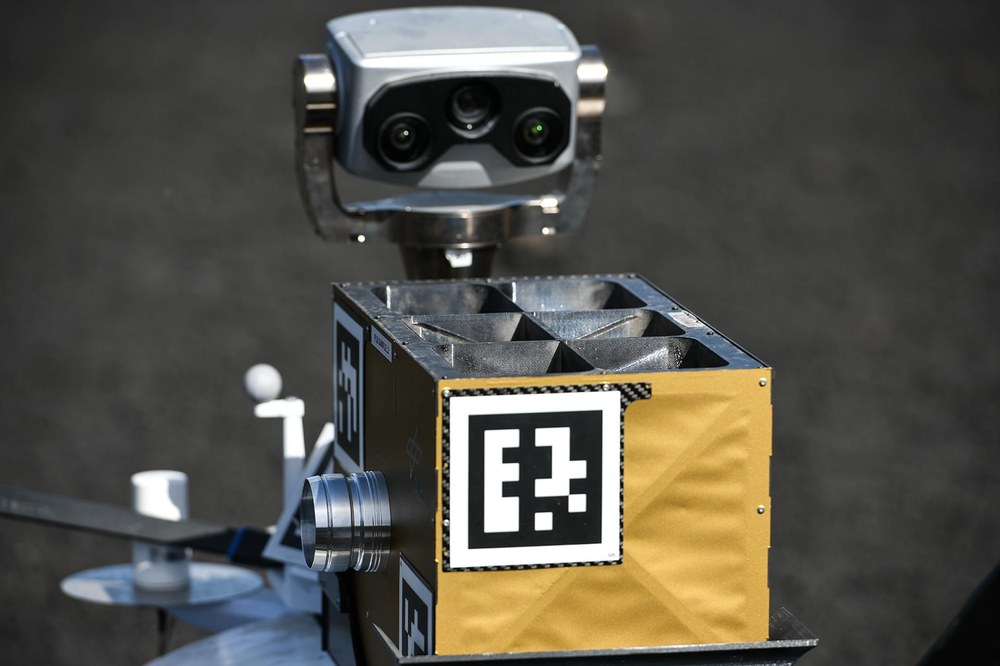
All the robots wear 'name tags' consisting of small black and white squares, which they use to recognise each other and know exactly where the others are at any given time. They placed boxes with antenna elements so precisely on Mount Etna that they could be combined to form a telescope. This set-up is called LoFar (Low Frequency array). The boxes are also equipped with the appropriate labels. LRU1 analysed the area, while LRU2 distributed the boxes. "Telescope units could be arranged over a large area on the far side of the Moon," says Emanuel Staudinger of the DLR Institute of Communications and Navigation. "From there, they could scan the radio portion of the electromagnetic spectrum for possible signs of extraterrestrial civilisations."
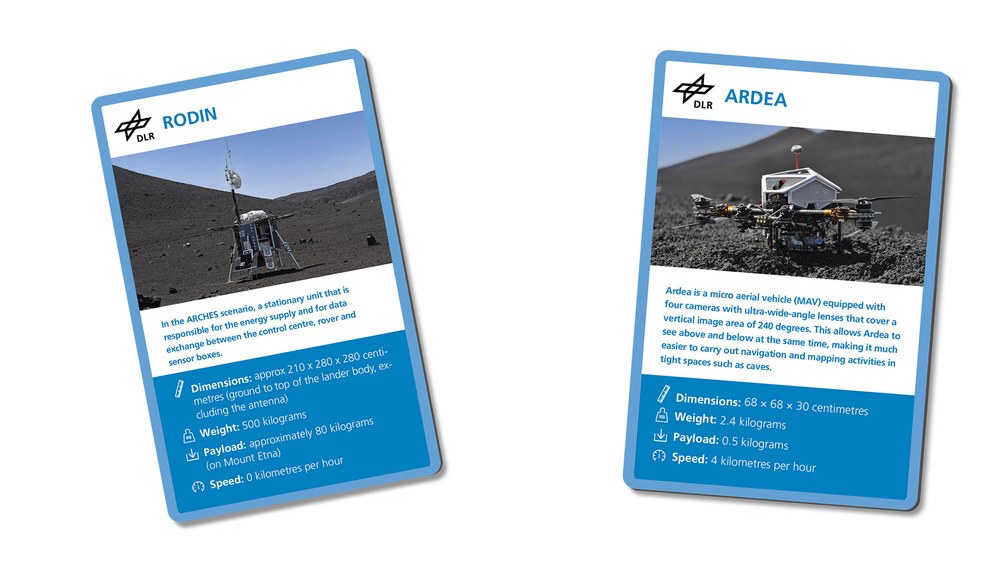
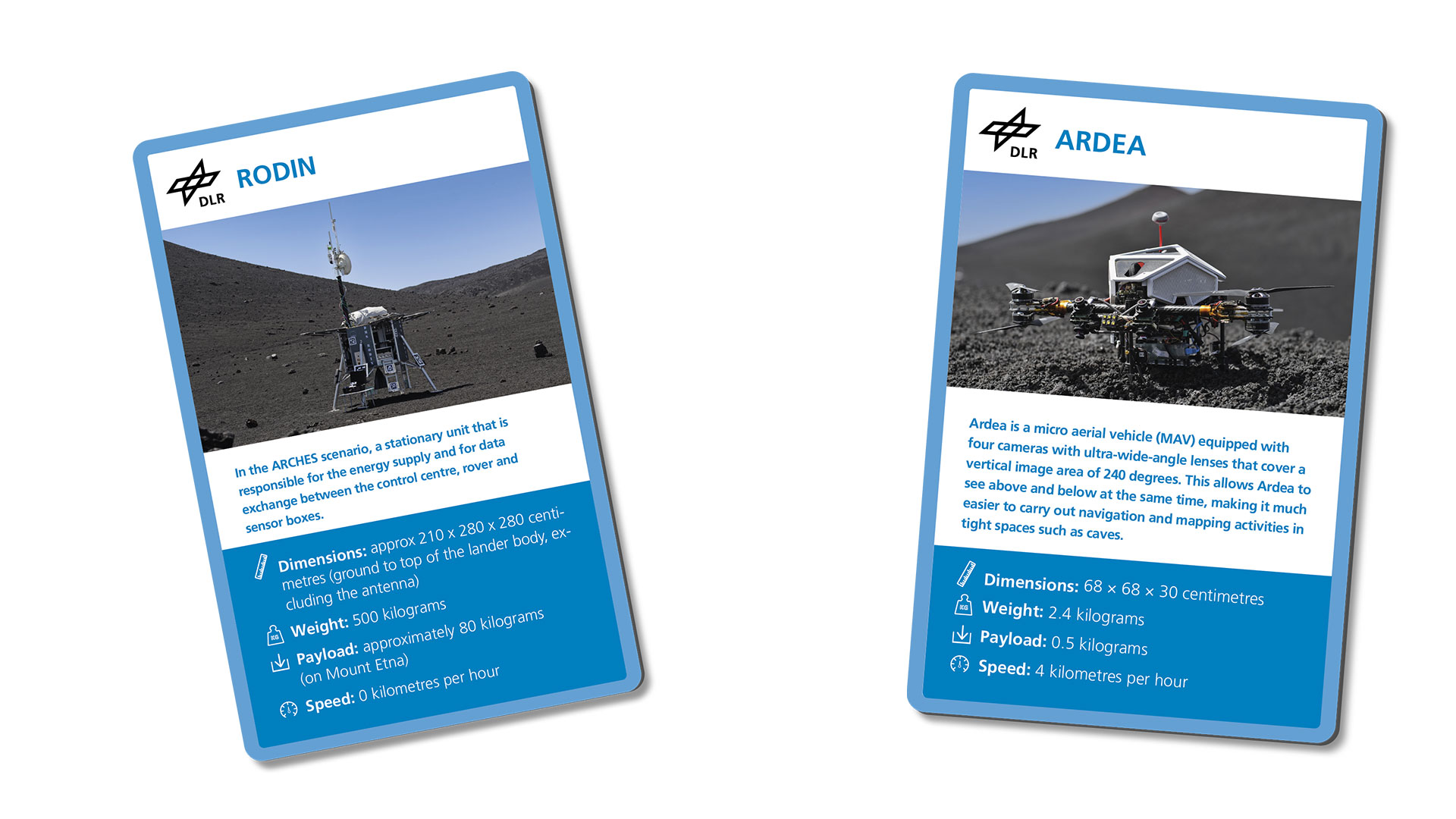
The Ardea drone is the fastest team member in the exploration of uncharted territory. It likes to fly at a height of two to three metres, mapping and analysing whether the route is suitable for the large robots. It processes data in real time – if Ardea gives the OK, the team follows. Consulting with people would be impossible on a mission to Mars. "It would take far too long to send the data to Earth, evaluate it and then send back commands," says Marcus Müller of the Institute of Robotics and Mechatronics. In the meantime, there might be an obstacle, or in the worst-case scenario, one of the team members could become an obstacle in the flight path. That is why Ardea works completely autonomously.
It 'sees' with four cameras that work in stereo pairs, and has a 240-degree vertical angle of view. "It's not just useful for examining surfaces – Ardea can even find its way in caves or lava tubes and create 3D maps there," Müller says. The drone's range is limited, but it always has a safe place to land – LRU1's back doubles as a landing platform.
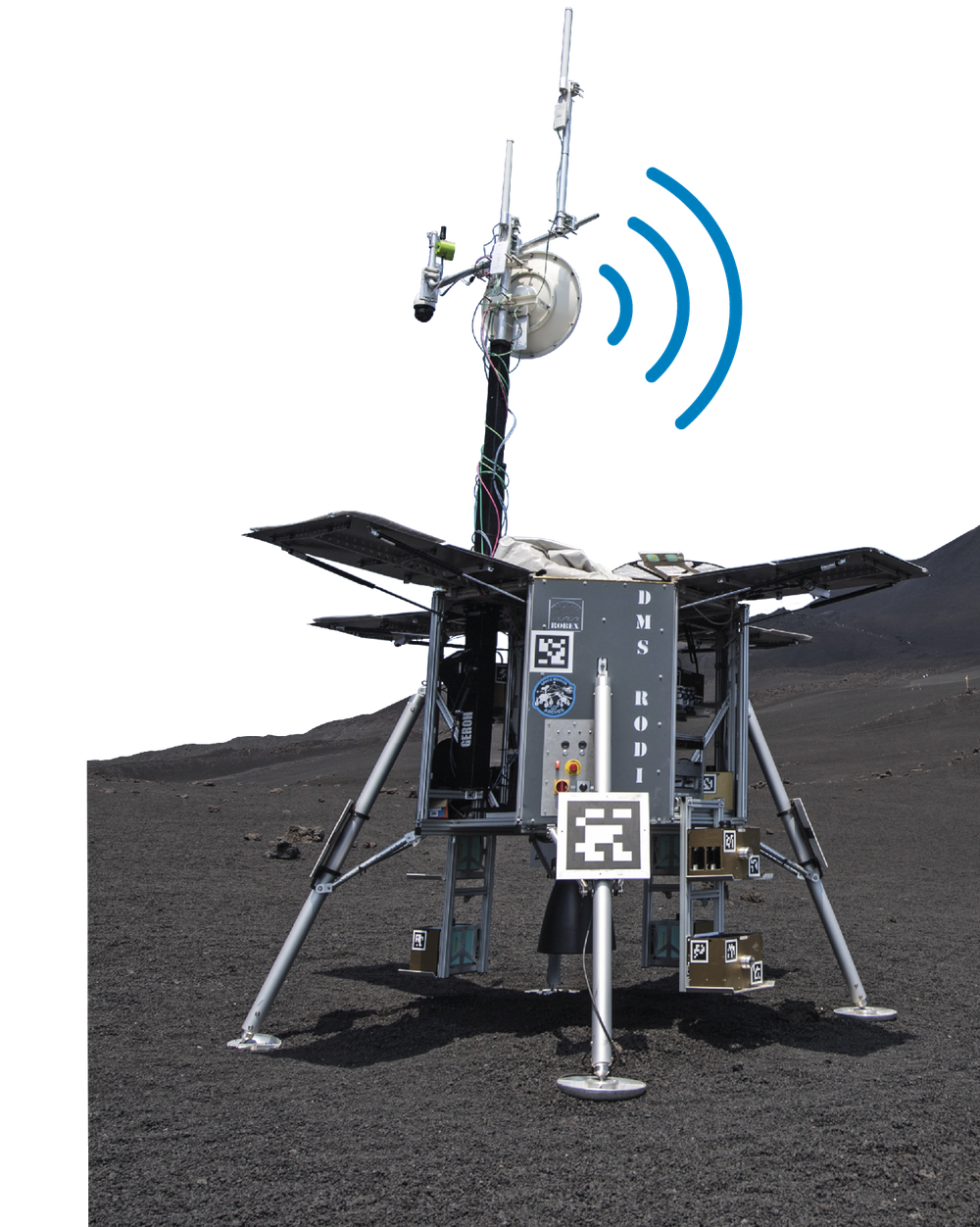
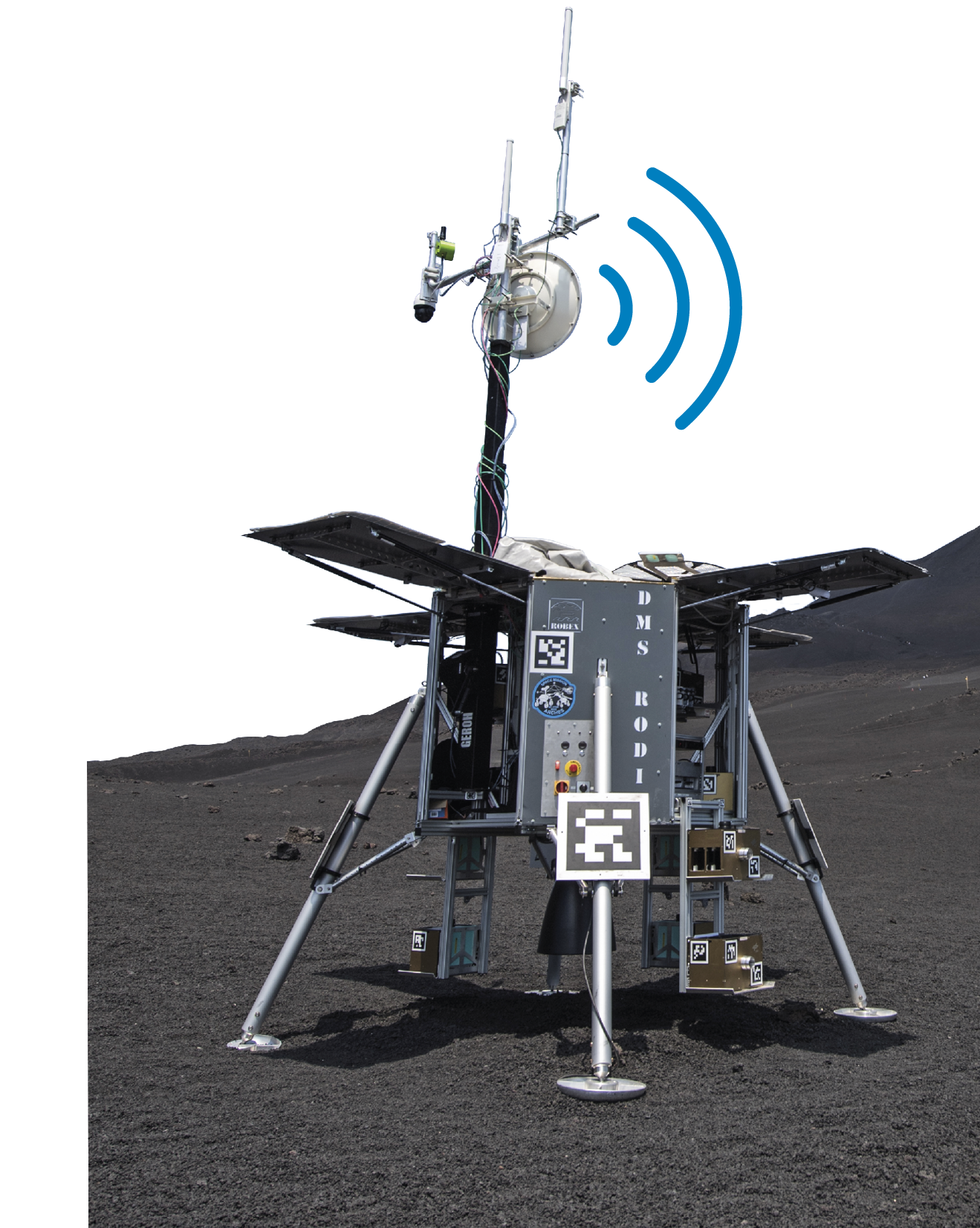
And when the mission has been completed, when batteries are drained and the rock sample box is full, Rodin stands ready and waiting. The lander unfolds its solar panels, provides energy and communications, and stores the boxes. "Rodin is like the big brother who takes care of everything," says Bernhard Vodermayer of the Institute of Robotics and Mechatronics. "It's the 'rock' and heart of the team." Indeed, it is quite literally at the centre of the team – when exploring, the robots orientate themselves to Rodin to stay in contact. The lander maintains contact not only with the team, but also with the scientists on Earth or at a base camp. A comparable model could be used on a space mission, during which the nozzle beneath the lander would slow it down as it touched down on extraterrestrial terrain. On Mount Etna, however, Rodin arrived in a container, thanks to a lot of (human) muscle power.
"Rodin is like the big brother who takes care of everything. It's the 'rock' and heart of the team."
Bernhard Vodermeyer, DLR Institute of Robotics and Mechatronics
Scout, that's its name. It looks like an insect and moves like a kangaroo. It does not jump very high, but the principle is the same: spring elements in its legs store energy and actively support movement. Some observers on Mount Etna exclaimed how cute Scout looks 'hopping about'. Roy Lichtenheldt of the DLR Institute of System Dynamics and Control, who is responsible for the robot, acknowledges that "Sometimes it is as though Scout was a pet." That was not planned – the technical possibilities and the functions were always at the forefront during development. In some ways, however, the design was influenced by nature: Its tripartite, six-legged body "is heavily inspired by insects," according to Lichtenheldt. Its flexible 'spine' is more mammalian. Scout is in its element in hazardous situations. If it falls and lands on its back, it simply turns over or keeps going. It can climb over obstacles up to 40 centimetres high and drag or haul loads of up to six kilograms. These abilities make Scout an excellent robotic cave explorer. On Etna it had another special assignment: in one experiment, it wore a WiFi repeater and positioned itself autonomously so that the other robots could stay in touch constantly without any issues. In other words, a real team player.
Many skills combined
Mount Etna's barren landscape bears a resemblance to the surface of the Moon. LRU2, Ardea, Rodin, LRU1 (from left) and Scout were deployed here. In the background is DLR’s Base Camp, which was set up for the mission.
Heterogeneous, autonomous, networked robotic systems have been developed since 2018 as part of the Helmholtz future project ARCHES (Autonomous Robotic Networks to Help Modern Societies). This involves an array of robots and fields of application. In addition to exploring the Solar System, the project paves the way for environmental monitoring of the oceans and disaster relief on Earth. The space demonstration mission, which took place on Mount Etna in June and July 2022, had been postponed several times due to the COVID-19 pandemic.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}