Utilizing Natural Dynamics for Reliable Legged LocomotionNatDyReL
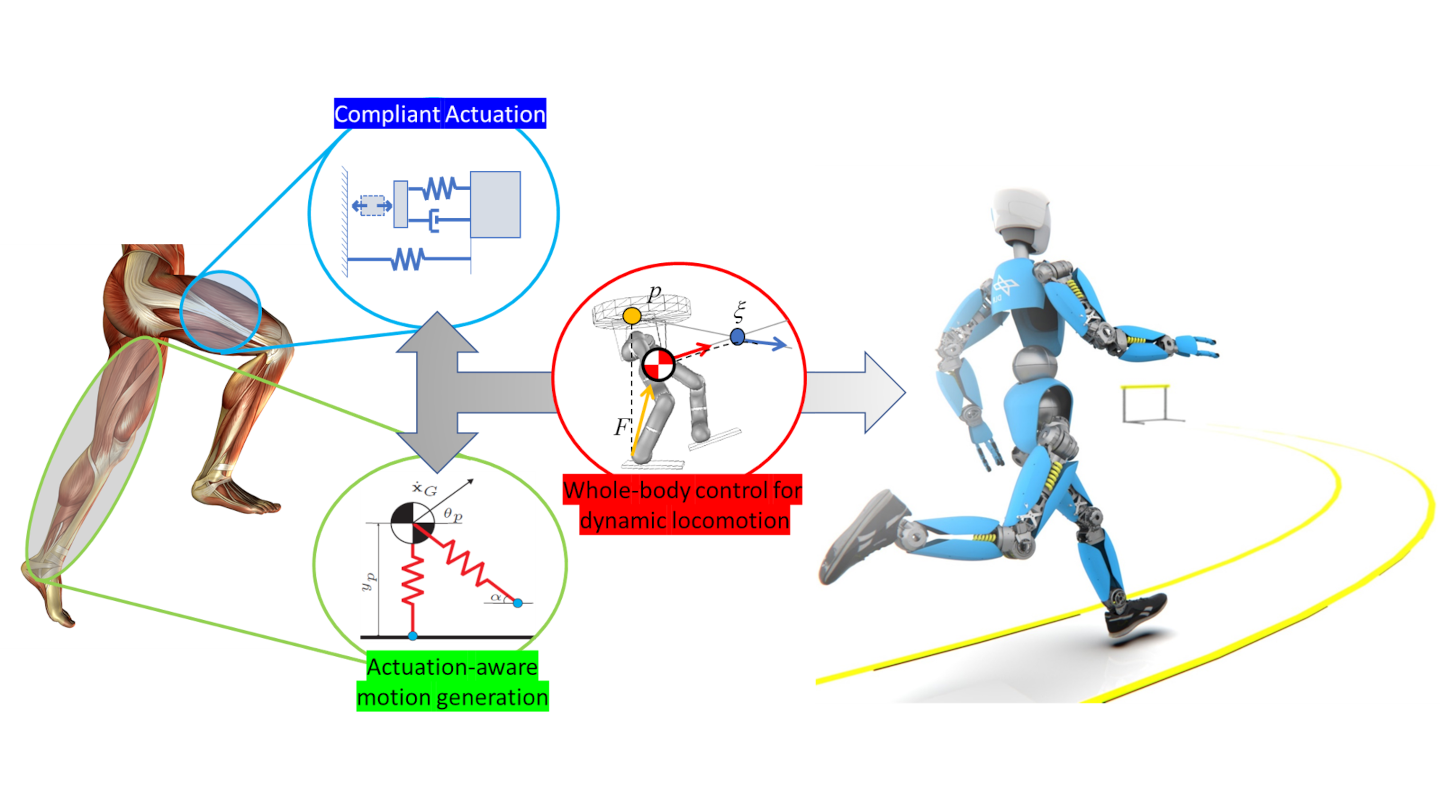
The NatDyReL (Utilizing Natural Dynamics for Reliable Legged Locomotion) project aims at a fundamental paradigm shift in the design and control of humanoid robots. This paves the way for a new generation of intrinsically compliant robots that are capable of adjusting their open loop actuator impedance in real-time to the task. Most importantly, the developed methods will allow for their use and adaptation in other morphologies, including multi-limbed walking or climbing robots.
| | |
|---|
Runtime | 2019-04-01 until 2024-09-30 |
Fields of Application | Humanoid Robots |
Funding | European Research Council (ERC) |
Project Details
In contrast to the now mature technology of torque-controlled drives, the robots developed in NatDyReL will allow an active adaptation of the dynamic drive characteristics (e.g. stiffness & damping). Thereby the robot can adapt its dynamic behaviour at runtime to the current ground conditions or the desired walking speed. In addition, part of the kinetic energy can be temporarily stored in the elastic drives at each step, thus enabling energy-efficient execution of dynamic walking movements. In order to successfully implement these concepts in practice, it is necessary to take the yielding drive dynamics fully into account in the planning of the overall body movement as well as in the real-time control. The project therefore requires close interdisciplinary cooperation between experts from different disciplines, especially from robotics, control engineering and mechatronics.



{kind=link}