
TORO for aircraft production of the future
As part of the EU COMANOID project, a two-week experimental campaign was held under realistic production conditions between February 7 and 21, 2019.
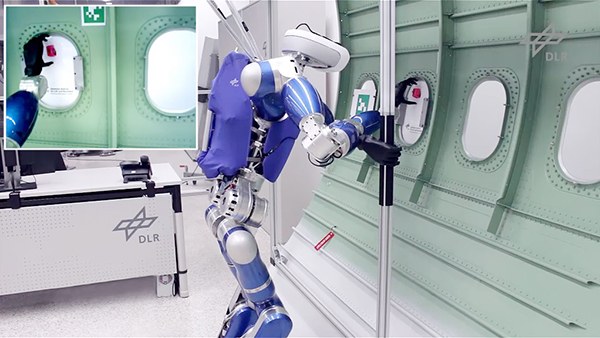
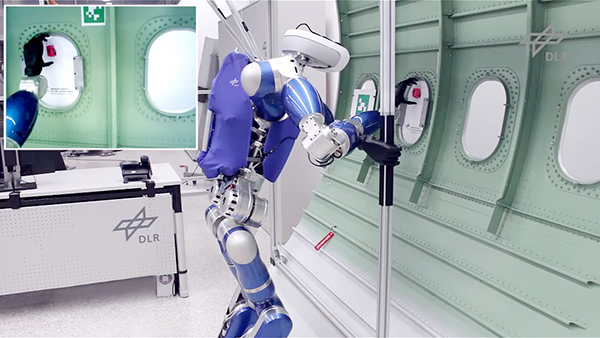
Under the direction of the French research center CNRS, the European cooperation project COMANOID explores the use of biped, humanoid robots for the aircraft industry. In order to reach sometimes difficult-to-access areas in aircraft, they must be able to support themselves during assembly with all their limbs within the aircraft hull. This is difficult for people and not ergonomic. Thanks to the robots, special brackets can be attached to hard-to-reach places. To do this, the robots must be able to find their way around in the aircraft hull using an integrated sensor system and retrieve the brackets completely autonomously and mount them in the aircraft. Since the robots will be working with people in the future, the safety aspects in particular must be taken into account.
“It is the first time ever that complex leg-based humanoid robots are being used for such a task under realistic production conditions in the aircraft industry. A corresponding pioneering spirit can be felt among the participating scientists, and we are pleased about the successful course of the experiment,” reported Christian Ott from the DLR Institute of Robotics and Mechatronics.
For four years, the DLR walking robot team has been collaborating with French and Italian scientists on two humanoid robots: the torque-controlled TORO robot and the position-controlled robot HRP4 by the Japanese manufacturer Kawada. DLR contributes its technology for torque-based multi-contact control and gait stabilization as central research content.

{kind=link}