Die Forschungsgruppe Maritime Verkehrslagesysteme forscht an Technologien zur zuverlässigen Erfassung der maritimen Verkehrslage. Primäres Ziel ist es, auf Basis kooperativer Verfahren eine eindeutige Beschreibung der Verkehrssituation (kooperatives Verkehrslagebild) zu erzeugen.
Zur Umsetzung dieses Zieles werden Daten und Informationen genutzt, die seitens des automatischen Identifikationssystems von Schiffen (AIS), von Navigationssensoren eines Schiffes und vom maritimen Schiffsradar bereitgestellt werden. Alle Systeme bzw. Sensoren verfügen über Eigenschaften, die den Schiffsführer oder Nautiker bei der Situationserfassung unterstützen. Jedes dieser Systeme besitzt als autark fungierendes System auf einer Schiffsbrücke aber auch Einschränkungen (z.B. AIS aufgrund der Möglichkeit der Aussendung fehlerbehafteter Werte durch falsche Eingaben oder fehlerbehaftete Sensoren oder Radar im Falle von Clutteringeffekten oder Abschirmungen), die den Bedarf nach einer „Fusion“ von Systemen und Sensoren begründen.
Bevor man Systeme und Sensoren jedoch fusioniert, ist die Kenntnis des eigenen Fehlerverhaltens eines Systems bzw. Sensors von entscheidender Bedeutung. Zudem lässt die rasant wachsende Geschwindigkeit von Computerprozessoren sowie die fortschreitende Entwicklung netzwerkbasierter Systeme es zu, den Einsatz mathematischer Verfahren zu untersuchen, die noch vor einigen Jahren für den Betrieb in Echtzeit ausgeschlossen werden konnten.
Insofern fokussieren sich die aktuellen Forschungsaktivitäten auf die Fragestellunge, welche Objekttrackingverfahren eingesetzt werden müssen, um ein Radarziel dann auch unter schwierigen Bedingungen (z.B. mehrere Ziele im Umfeld, Cluttering) sicher verfolgen zu können. Um die entwickelten Algorithmen bzw. Prozessoren optimieren zu können, setzen wir ein Verkehrslagesimulationssystem ein, auf dessen Basis sich eine Vielzahl von Verkehrslageszenarien generieren und stetig reproduzieren lassen. Für die erweiterte Nutzung von AIS im Sinne der Kollisionsverhütung arbeiten wir zudem daran, unseren im Forschungshafen Rostock bereits operationell laufenden AIS-Plausibilitätsmonitor stetig durch neue Modelle im Sinne der Fehlerprädiktion zu verbessern. Unsere Forschung konzentriert sich auch auf die (mehrfach) erweiterte Zielverfolgung in maritimen Umgebungen.
Kalman-Filter für AIS Trajektorien Bestimmung (Glättung / Vorhersage)
AIS – data mining
Radarbild-bearbeitung
Automatische Zielextraktion
Verlässliche Radarzielverfolgung
Verfolgung einzelner und mehrerer ausgedehnter Radarziele
Radar und AIS Fusionstechnologien
Partikelfilter Ansatz
Zielassoziation
Kooperative Verkehrslage-bestimmung
Entwicklung von Filter Technologien
Verkehrslagesimulationssystem für maritime Navigation
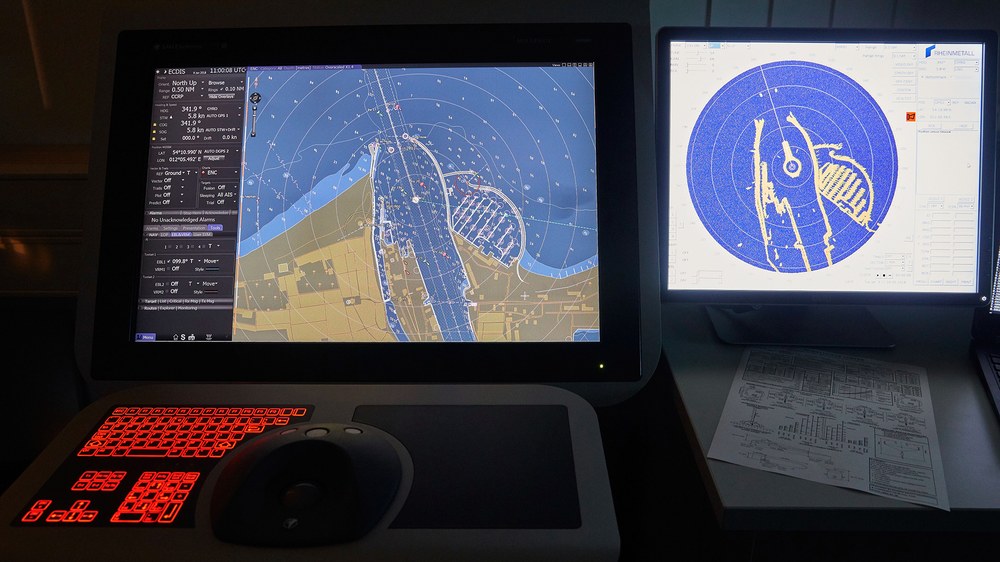
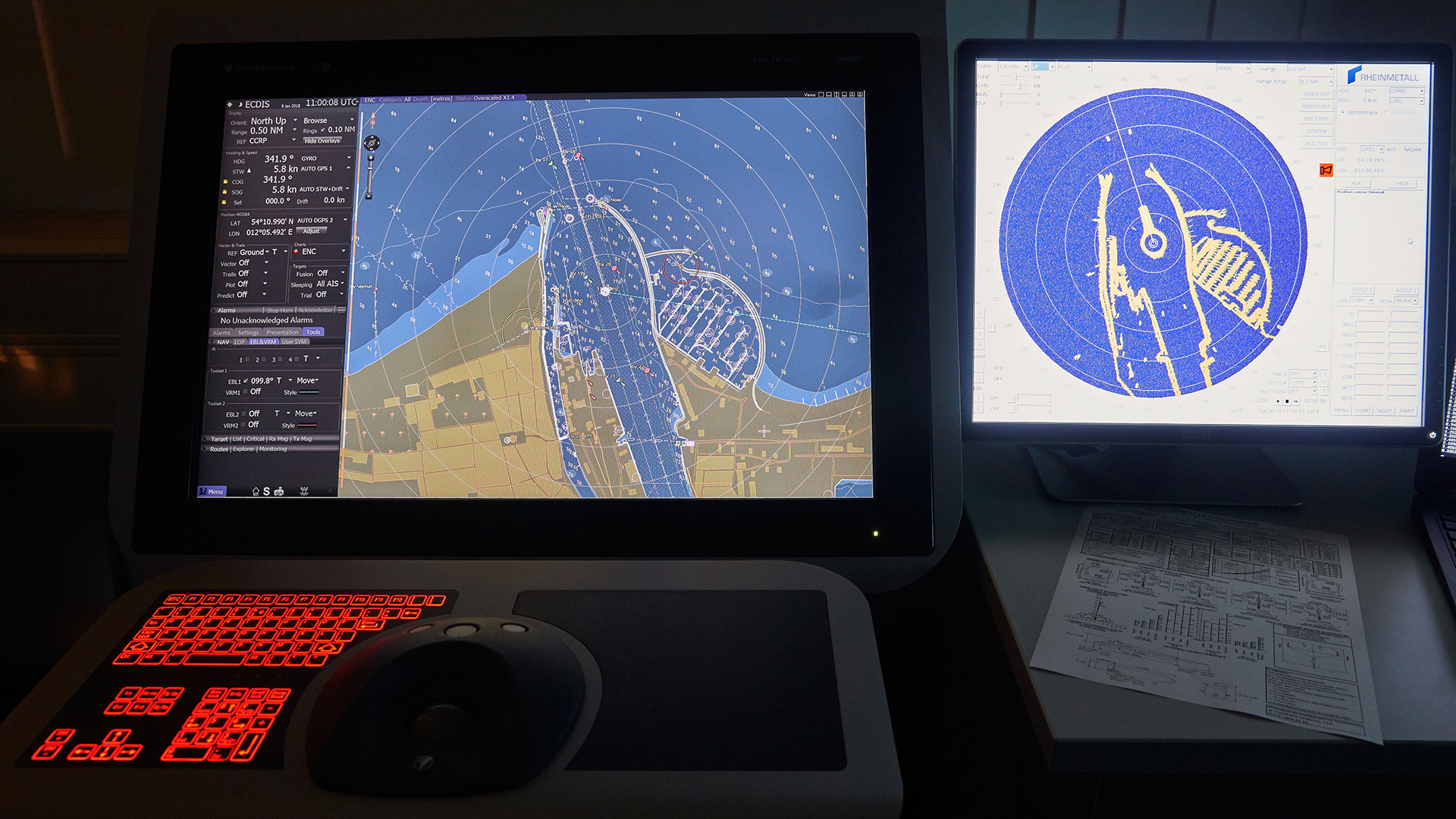
Das maritime Verkehrssimulationssystem ist eine Sammlung von Softwaremodulen, die dazu entwickelt wurden, jede denkbare Verkehrslagesituation - ob sicher oder gefährlich – darzustellen, ohne das Labor zu verlassen. Die Systemkonfiguration beinhaltet eine Schnittstelle zur Definition des Standortes des eigenen Schiffes zusammen mit Fremdschiffen in einem vordefinierten Übungsgebiet.
Konsole mit Darstellungen des maritimen Verkehrslagesimulationssystems
Das maritime Verkehrslagesimulationssystem basiert auf offiziellen nautischen Karten. Die Schiffe können kommandiert werden, um jedes Manöver durchzuführen. Im Ergebnis wird ein Radarbild wie auf einem realen Schiff in Echtzeit generiert und kann als Datenquelle für die o.g. Zieldetektionssysteme verwendet werden.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}