The research of the team Traffic Systems is focused on the development of technologies for reliable traffic situation assessment using nautical sensors and systems. The primary goal of the team is the provision of an unambiguous description of the traffic situation using cooperative traffic assessment.
In order to achieve the above goal, the team uses data and information from the automatic identification system (AIS), from the navigational sensors of the vessel and from the maritime radar. All systems or sensors have properties which are supporting the nautical personal during the task of traffic situation assessment. Each of these systems can be operated in an autarkic mode on the bridge of the vessel but with restrictions (for example AIS data can be corrupt or wrong or the radar screen might be dominated by sea clutter). These restrictions of single sensor systems explain the need for sensor fusion technologies, which are able to mitigate those limitations.
Before it is possible to fuse systems or sensors it is of crucial importance to know the error behavior of each single system or sensor. Furthermore the rapid growth of computational power as well as the progress in the field of network based systems allows the use of numerical methods and algorithms in real time, which was not feasible just a few years ago.
Insofar, the current research activities of the team is focused on answering the question of, which object tracking procedure is able to reliably track maritime targets in extreme conditions (multiple targets, cluttering). In order to improve the performance of the developed algorithms and processors we use a traffic situation simulation system, which is able to simulate a variety of different scenarios in a reproducible manner. We are continuously working on the improvement of our algorithms in the research harbor Rostock running AIS plausibility monitor focusing on the extension of the AIS for collision avoidance. Our research as well focuses on (multiple) extended target tracking in maritime environments. We also provide a couple of marine radar datasets to the research community. All these activities eventually aim at the development of robust fusion and tracking algorithms for reliable assessment of the traffic situation.
Kalman filter for AIS trajectory smoothing/prediction
AIS – data mining
Radar Image processing
Automatic target extraction
Reliable target tracking
Single and multiple extended target tracking
Radar and AIS Fusion technologies
Particle Filter approach
Target association
Cooperative traffic management
Development of cooperative filter technologies
Verkehrslagesimulationssystem für maritime Navigation
Das maritime Verkehrssimulationssystem ist eine Sammlung von Softwaremodulen, die dazu entwickelt wurden, jede denkbare Verkehrslagesituation - ob sicher oder gefährlich – darzustellen, ohne das Labor zu verlassen. Die Systemkonfiguration beinhaltet eine Schnittstelle zur Definition des Standortes des eigenen Schiffes zusammen mit Fremdschiffen in einem vordefinierten Übungsgebiet.
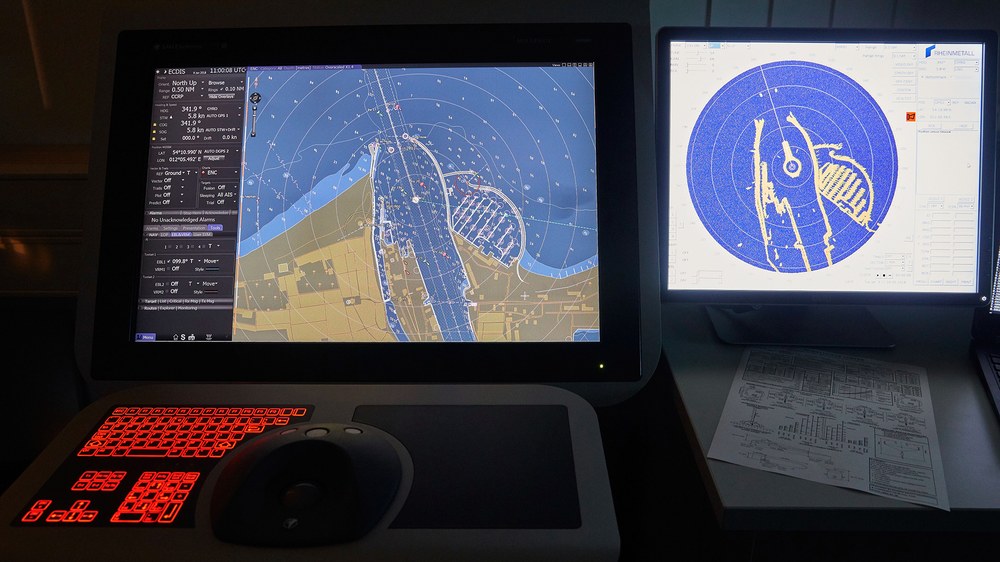
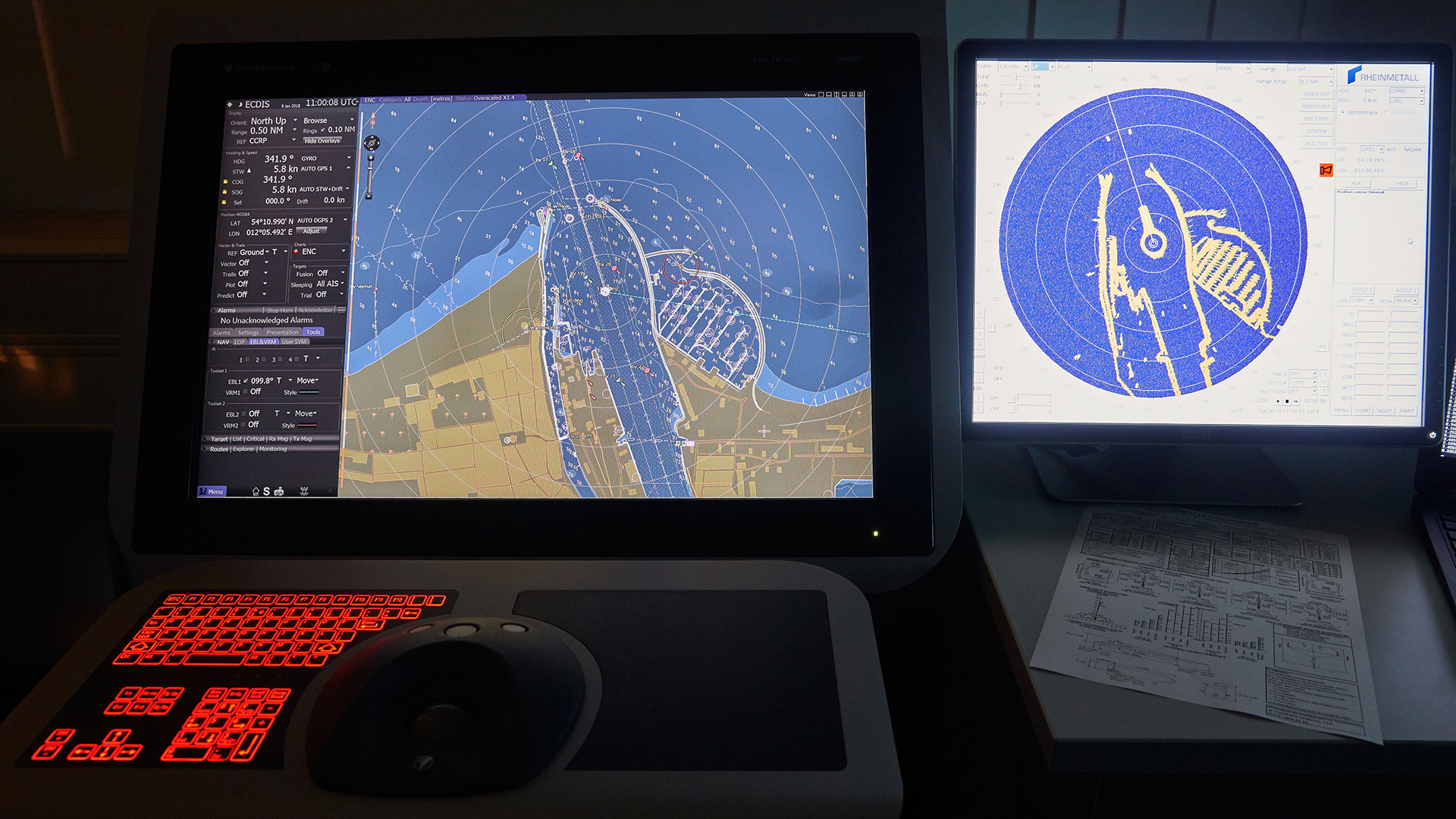
Konsole mit Darstellungen des maritimen Verkehrslagesimulationssystems
Das maritime Verkehrslagesimulationssystem basiert auf offiziellen nautischen Karten. Die Schiffe können kommandiert werden, um jedes Manöver durchzuführen. Im Ergebnis wird ein Radarbild wie auf einem realen Schiff in Echtzeit generiert und kann als Datenquelle für die o.g. Zieldetektionssysteme verwendet werden.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}