Perseverance – mobiles Hightech-Labor auf Rädern

{kind=link}

{kind=link}

{kind=link}
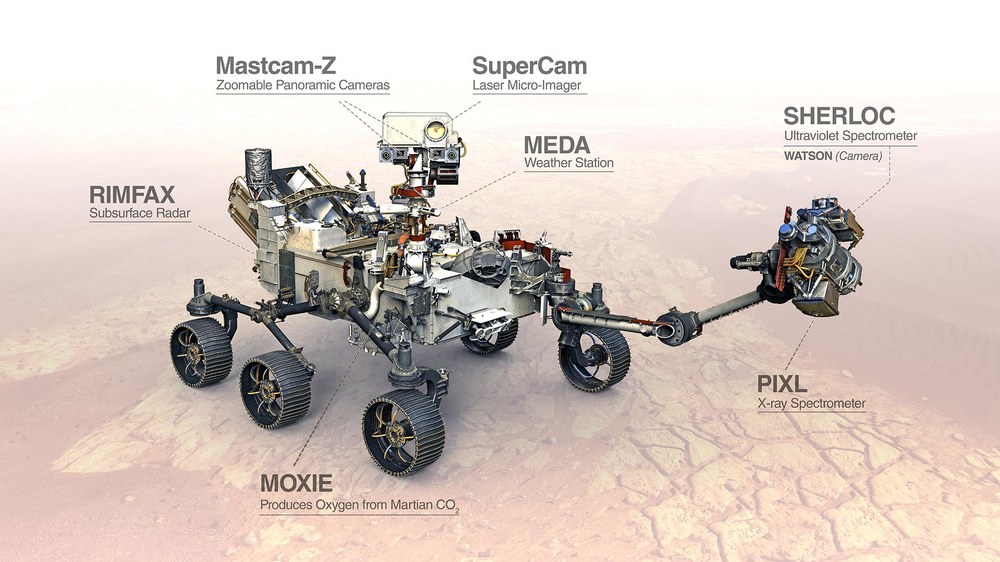
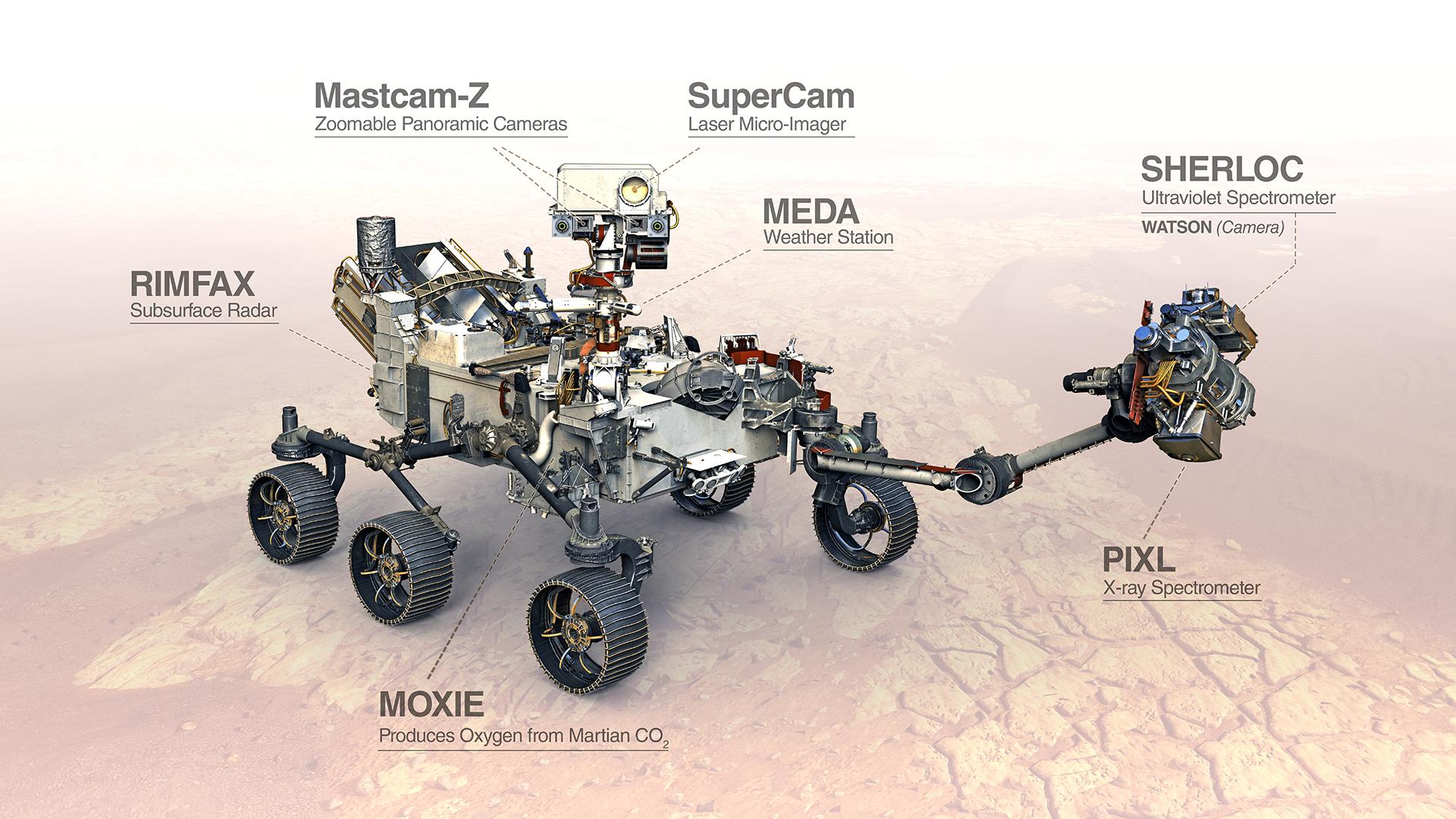
Der Marsrover Perseverance der NASA ist das komplexeste Fahrzeug der Planetenforschung. Der kleinwagengroße Rover ist mit insgesamt sieben Instrumenten und 16 Kameras ausgestattet. Neun Kameras dienen zur Hinderniserkennung und Navigation. Mit sieben wissenschaftlichen Kameras soll der Rover Informationen über die Geologie und die Umweltbedingungen an der Landestelle gewinnen, Proben für einen späteren Transport zur Erde auswählen und vor allem auch Spuren von früherem Leben (Biosignaturen) finden, die in den Sedimenten im Krater Jezero vorhanden sein könnten.
In Aufbau und Größe ähnelt er seinem Vorgänger Curiosity, der 2012 im Marskrater Gale gelandet und noch immer im Einsatz ist. Perseverance ist im Vergleich zu ihm allerdings um einiges komplexer. So wird er mithilfe seines Bohrers erstmals Gesteinsproben entnehmen, diese verkapseln und für eine zukünftige Mission zur Abholung auf der Marsoberfläche deponieren. Viele der Instrumente auf Perseverance, die bereits auf Curiosity zum Einsatz kamen, wurden verbessert und weiterentwickelt. Zum Beispiel wurde Curiositys Mastcam zu der neuen Mastcam-Z weiterentwickelt, einer Stereo- und Panoramakamera, die nun zusätzlich über eine Zoomfunktion verfügt. Das Experiment SuperCam, das mithilfe eines gepulsten Lasers die chemische und mineralogische Zusammensetzung sowie die Härte der Gesteine und des Marsbodens bestimmen kann, ist der Nachfolger von Curiositys ChemCam.
Perseverance wird aber auch neue Technologien für zukünftige astronautische Missionen zum Roten Planeten testen. Dazu gehören ein Autopilot zur Vermeidung von Gefahren (Terrain Relative Navigation) und eine Reihe von Sensoren zur Datenerfassung während der Landung (Mars Entry, Descent and Landing Instrumentation 2, MEDLI2). Ein neues autonomes Navigationssystem wird es dem Rover ermöglichen, in schwierigem Gelände schneller voranzukommen. Auch das Demonstrationsexperiment MOXI ist eine Neuheit: Mit diesem Instrument soll aus dem Kohlendioxid der Marsatmosphäre Sauerstoff extrahiert werden, der beispielsweise als Treibstoffbestandteil für spätere Rückflüge zur Erde verwendet oder von Astronauten zur Atmung genutzt werden könnte. Am Rover sind außerdem verschiedene Materialien für Raumanzüge angebracht. Die NASA will wissen, wie diese der unwirtlichen Umgebung auf dem Mars standhalten.
Helikopter Ingenuity: Erster Motorflug auf einem anderen Planeten
Mit der Helikopterdrohne Ingenuity (Einfallsreichtum) beschreitet die NASA technologisches Neuland. Ingenuity ist eine Technologiedemonstration, um den ersten motorisierten Flug auf dem Mars zu testen. Erstmals in der Geschichte der Raumfahrt wird ein von der Erde mitgeführtes Fluggerät vom Boden eines anderen Planeten in die Atmosphäre aufsteigen, kontrolliert die Gegend überfliegen und auch wieder landen. Dieses Flugexperiment soll mehrere Male wiederholt werden. Da der Luftdruck auf dem Mars weniger als ein Hundertstel des irdischen Luftdrucks beträgt, musste Ingenuity extrem leicht gebaut werden und gleichzeitig sehr großflächige, von einem kleinen Elektromotor (350 Watt Leistung) angetriebene, extrem schnell rotierende Rotorblätter erhalten, um überhaupt aufsteigen zu können. Die Drohne hat eine Masse von 1800 Gramm und Rotorblätter von 120 Zentimetern Spannweite. Eine Minikamera wird Farbbilder aus 10 bis 15 Metern Höhe liefern. Eine weitere Schwarz-Weiß-Kamera liefert Aufnahmen, die der kleinen Drohne zur Navigation dienen.
Die Instrumente des Rovers
Mastcam-Z: hochauflösende Panoramakamera mit Zoom
Mastcam-Z (Mast Camera, Zoom) ist eine multispektrale Panoramakamera mit Stereo- und Zoomfunktion. Sie besteht aus zwei identischen Kameras, die sich im Abstand von 24 Zentimetern am oberen Ende des zwei Meter langen Fernerkundungsmasts des Rovers befinden. Von der erhöhten Position aus kann die Mastcam-Z 360-Grad-Panoramen in 3D, Mosaike, Einzelbilder und Videos der Marsoberfläche in sichtbaren Farben (RGB) aufnehmen. Jede der beiden Mastcam-Z-Kameras besteht aus einem Zoom-, Fokus- und Filterradmechanismus. Die Kombination aus einem CCD-Detektor mit 1600 mal 1200 lichtempfindlichen Pixeln und einer 4:1 Zoom-Optik (f/7 Weitwinkel bis f/10 Telephoto-Optik) sorgt dafür, dass die Kamera bei einzelnen Aufnahmen Objekte von ungefähr drei bis vier Zentimetern Größe über eine Entfernung von etwa 100 Metern hinweg sichtbar machen kann. Im Nahbereich (Arbeitsbereich des Roboterarms) liegt die Auflösung bei circa einem Millimeter. Die Filterräder der Mastcam-Z sind außerdem mit Bandpassfiltern (400 bis 1000nm) ausgestattet, die zur Unterscheidung von nicht-verwittertem und verwittertem Material dienen und wichtige Einblicke in die Mineralogie vieler Silikate, Oxide, Oxyhydroxide und diagnostischer hydratisierter Minerale liefern.
Die beiden Kameras sind sozusagen die „Geologie-Augen“ des Rovers. Die Aufnahmen der Kameras ermöglichen es dem Wissenschaftsteam, die geologische Geschichte des Jezero-Kraters anhand der Stratigraphie von Gesteinsaufschlüssen und Regolith zu erforschen sowie die Art vorhandenen Gesteinsarten (zum Beispiel Sedimentgestein oder vulkanisches Gestein) einzugrenzen. Mithilfe der Aufnahmen können auch texturelle, mineralogische, strukturelle und morphologische Details in Gesteinen, Sedimenten und im Bodenmaterial am Einsatzort des Rovers beobachtet und analysiert werden. Auch dynamische Prozesse wie „Staubteufel“ (kleine Windhosen), Wolkenbewegungen und astronomische Phänomene können aufgenommen und per Video dokumentiert werden. Zusätzlich dienen die Kameras als Ersatzsystem für die Navigationskameras und können im Notfall deren Aufgaben übernehmen.
Aufgaben:
- Charakterisierung der Geomorphologie, der geologischen Geschichte und der Entstehungsprozesse der Marsoberfläche im Jezero-Krater, insbesondere im Hinblick auf derzeitige und frühere Umweltbedingungen und Habitabilität (Eignung, Leben über einen längeren Zeitraum hinweg aufrecht zu erhalten)
- Kontextaufnahmen zur Auswahl von Stellen für die Entnahme von Gesteins- und Sedimentproben (für spätere Untersuchung auf der Erde)
- Durchführung atmosphärischer Untersuchungen wie die Beobachtung von Wolken und Staubteufeln auf dem Mars, die Untersuchung von Aerosolen in der Atmosphäre, die Untersuchung von aeolischen Transportvorgängen bei Dünen, die Charakterisierung und Darstellung eis- beziehungsweise frostbildender Prozesse sowie die Dokumentation dynamischer atmosphärischer Prozesse durch Videoaufnahmen
- Bereitstellung von Aufnahmen zur Unterstützung des Roverbetriebs (Ermittlung wichtiger Positionsdaten zur Navigation, zur genauen Positionierung des Roboterarms, etc.)
Die wissenschaftliche Leitung der Mastcam-Z liegt bei der Arizona State University. Im Wissenschaftsteam sind auch Mitarbeitende des Deutschen Zentrums für Luft- und Raumfahrt (DLR) vertreten, die an der taktischen und strategischen Aufnahmeplanung sowie an der wissenschaftlichen Auswertung und Prozessierung der Daten beteiligt sind. In die Prozessierung der Bilder der Stereokamera fließt die langjährige Expertise der Berliner DLR-Planetenforscherinnen und -forscher ein, die sie bereits mit Kameratechnik bei den Missionen Mars Express, Dawn, MASCOT/Hayabusa2 und Philae/Rosetta gesammelt haben.
SuperCam: Laser ermittelt berührungslos chemische Zusammensetzung
Das Instrument SuperCam ist eine Kombination aus einer Kamera und verschiedenen Spektrometern. Es ist eine Weiterentwicklung der ChemCam, die sich auf dem Rover Curiosity befindet. Neben der Kamerafunktion, mit der hochauflösende Kontextaufnahmen in Farbe möglich sind, kann SuperCam mittels eines Lasers kontaktlos die chemische Zusammensetzung und Mineralogie von Gesteinen, Sand und Staub in der Umgebung des Rovers bestimmen (LIBS – Laser-Induced Breakdown Spectroscopy). Zusätzlich besitzt das Instrument die Fähigkeit, ebenfalls mit der Methode der Raman- und der Infrarotspektroskopie Analysen durchzuführen. Auch ein Mikrofon ist Bestandteil der SuperCam. Die Leitung des Instruments liegt beim Los Alamos National Laboratory (LANL) in New Mexico und dem von der französischen CNES getragenen Institut de Recherche en Astrophysique et Planétologie (IRAP) in Toulouse. Das Berliner DLR-Institut für Optische Sensorsysteme ist an der Analyse von Messungen mit dem Instrument beteiligt.
MEDA: Die Mars-Wetterstation auf Perseverance
Das Instrument MEDA (Mars Environmental Dynamics Analyzer) besteht aus einer Reihe von Sensoren. Diese messen Temperatur, Windgeschwindigkeit und Windrichtung, Atmosphärendruck, relative Luftfeuchtigkeit und gegebenenfalls deren Austausch mit dem Marsboden sowie die Größe und Form von Staub in der Atmosphäre. Die wissenschaftliche Leitung von MEDA liegt beim Centro de Astrobiología in Madrid, Spanien. Das DLR-Institut für Planetenforschung ist in die Kalibrierung der Feuchtesensoren und Datenanalyse eingebunden. Die MEDA-Messungen sollen zeigen, inwieweit das lokale Wetter die Funktionsfähigkeit von Perseverance und den Experimenten beeinflusst, dienen aber auch der Vorbereitung zukünftiger astronautischer Missionen zum Mars.
SHERLOC: Raman-Spektrometer spürt organische Verbindungen auf
Das Instrument SHERLOC (Scanning Habitable Environments with Raman & Luminescence for Organics and Chemicals) befindet sich am beweglichen Arm des Rovers. Es ist ein mit einer Kamera gekoppeltes Raman-Spektrometer mit UV-Laser (Wellenlänge: 248,6 nm; Trefferfläche: Ø 100 Mikrometer), das unter anderem Biosignaturen und organische Verbindungen berührungs- und zerstörungsfrei aus kurzer Distanz identifizieren kann. SHERLOCs „Partner für visuelle Aufklärung“ ist die hochauflösende Farbkamera (WATSON) für mikroskopische Aufnahmen der Marsoberfläche. Diese Kamera entspricht im Prinzip der Lupenkamera MAHLI, die sich am beweglichen Arm des Vorgänger-Rovers Curiosity befindet. Die wissenschaftliche Leitung liegt beim Jet Propulsion Laboratory (JPL) der NASA in Pasadena, Kalifornien. Der Name ist an den berühmten Detektiv Sherlock Holmes angelehnt, der mit forensischem Gespür Kriminalfälle zu lösen versuchte. John H. Watson war mit seiner Lupe Holmes’ Partner bei der Untersuchung seiner Fälle.
PIXL: Analyse kleinster Teile mittels Spektrometer und Kamera
PIXL (Planetary Instrument for X-ray Lithochemistry) ist ein Röntgenspektrometer zur feinskaligen Analyse der chemischen Zusammensetzung von Material auf der Marsoberfläche. Seine Empfindlichkeit kann geringe Konzentration von nur wenigen ppm (parts per million) unterschiedlichster Substanzen messen. Das Instrument befindet sich am Instrumentenkopf des Roboterarms, sodass der Röntgen-Messstrahl die Flexibilität wie bei einem in der Hand gehaltenen Laserpointer hat. PIXL ist zusätzlich mit einer hochauflösenden Kamera ausgestattet, die wie eine starke Lupe Nahaufnahmen von Gesteins- und Bodentexturen macht. Dabei kann sie sogar Strukturen von der Größe eines Salzkorns erfassen. Geleitet wird das Experiment vom Jet Propulsion Laboratory (JPL) der NASA in Pasadena, Kalifornien.
RIMFAX: Radar zur Charakterisierung des Marsuntergrunds
RIMFAX (Imager for Mars' Subsurface Experiment) ist ein am Heck von Perseverance angebrachtes Bodenradar, mit dem die geologische Struktur und gegebenenfalls auch Eislinsen oder sogar salzhaltiges Wasser unter der Marsoberfläche erfasst werden. Die Radarwellen haben Frequenzen zwischen 150 und 1200 Megahertz und können, je nach Beschaffenheit des Bodens, bis in eine Tiefe von zehn Metern oder tiefer vordringen. Nach mehreren Radarexperimenten im Orbit ist RIMFAX das erste bodendurchdringende Radarinstrument, das auf der Marsoberfläche eingesetzt wird. Die wissenschaftliche Leitung liegt bei der Universität Oslo, Norwegen. Der Name des Experiments leitet sich von Hrímfaxi ab, dem Pferd, das in der norwegischen Mythologie die Nacht über das Land bringt
MOXIE: Sauerstoff gewinnen für zukünftige astronautische Missionen zum Mars
Das Experiment MOXIE (Mars Oxygen In-Situ Resource Utilization Experiment) ist eine Technologiedemonstration, die nach dem Prinzip der Photosynthese bis zu zehn Gramm Sauerstoff pro Stunde aus den Kohlendioxidmolekülen (CO2) in der Marsatmosphäre abspalten soll. Dieser könnte von zukünftigen Astronauten auf dem Mars beispielsweise als Treibstoffbestandteil für Rückflüge zur Erde verwendet oder zur Atmung genutzt werden. Das Instrument hat etwa die Größe einer Autobatterie und ist vorne rechts im Körper des Rovers angebracht. Die Leitung des Experiments liegt beim Massachusetts Institute of Technology (MIT) in Cambridge, Massachusetts.