Perseverance – a high-tech laboratory on wheels
{kind=link}

{kind=link}

{kind=link}
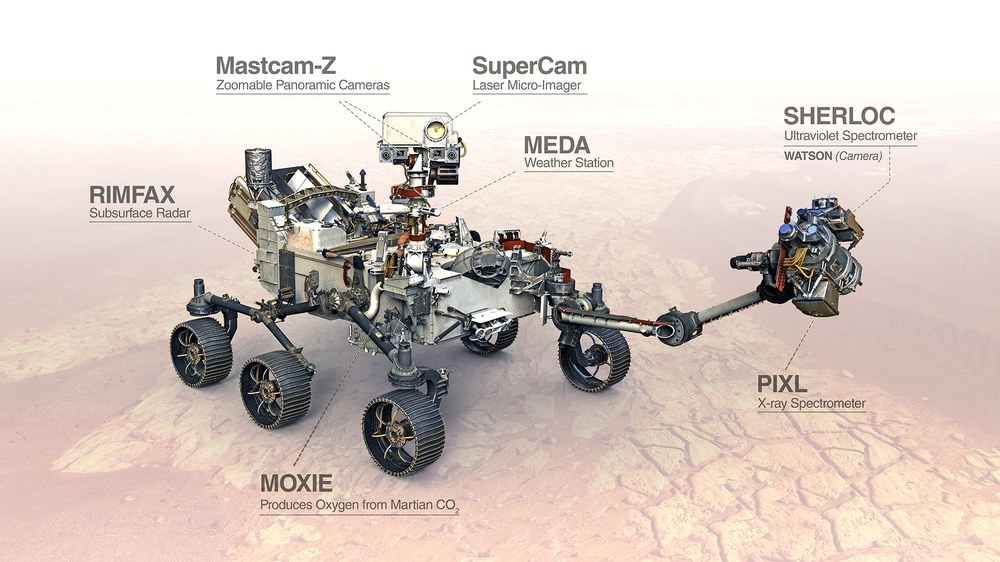
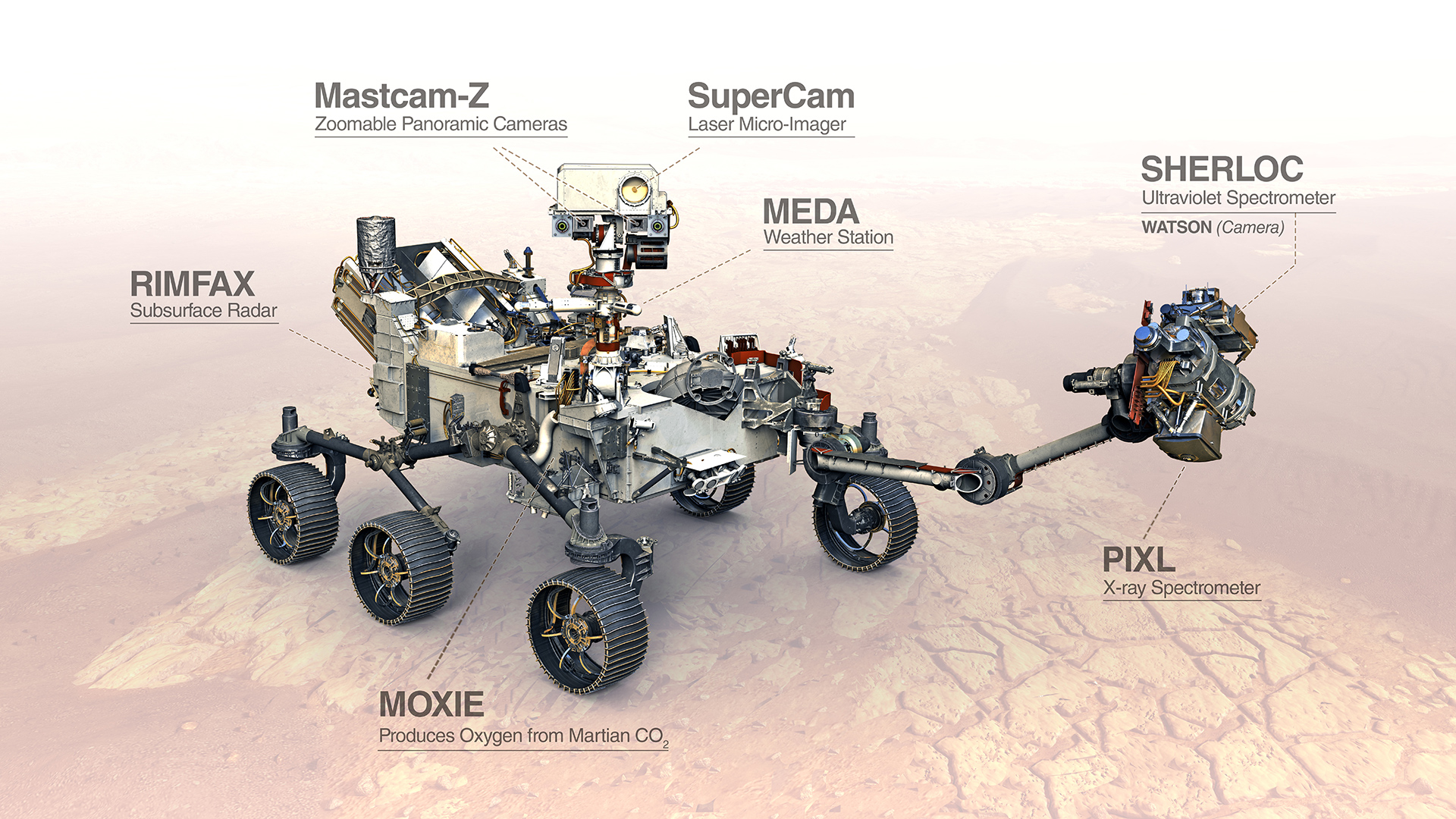
NASA's Perseverance Mars rover is the most sophisticated vehicle ever in the field of planetary research. The rover, which is the size of a small car, is equipped with seven scientific instruments and 16 cameras. Nine of the cameras are used for detecting obstacles and navigation. Using its seven scientific cameras, the rover will gather information about the geology and environmental conditions at the landing site, select samples to be transported back to Earth later, and most importantly, attempt to find traces of past life (biosignatures) that may be present in the sediments in Jezero Crater.
In terms of design and size, this rover resembles its predecessor Curiosity, which landed in Gale Crater on Mars in 2012 and is still in operation. However, Perseverance is a much more sophisticated rover. For example, it will use its drill to obtain rock samples, encapsulate them, and deposit them on the surface of Mars to be collected as part of a future mission to the Red Planet. Many of the scientific instruments on Perseverance that were already used on the Curiosity rover have been improved and enhanced. Curiosity's mast camera has been further developed into the new Mastcam-Z, a stereo and panoramic camera that now features a zoom function. The SuperCam instrument, which uses a pulsed laser to determine the chemical composition, mineralogy and hardness of rocks and the Martian surface, is the successor to Curiosity's ChemCam.
Perseverance will also test new technologies for future human missions to the Red Planet. These include an autopilot system to avoid hazards (Terrain Relative Navigation) and have included a series of sensors for recording data during landing (Mars Entry, Descent and Landing Instrumentation 2, MEDLI2). A new autonomous navigation system will enable the rover to move faster across difficult terrain. The Mars Oxygen In-Situ Resource Utilization Experiment (MOXIE) demonstrator is also a new feature. This will be used to extract oxygen from the carbon dioxide in the Martian atmosphere, which could, for example, be used as a propellant for later return flights to Earth or for life support. Various spacesuit materials have been attached to the rover as well. NASA wants to know how well they withstand the inhospitable Martian environment.
Ingenuity helicopter – first powered flight on another planet
NASA is breaking new technological ground with the Ingenuity helicopter drone. Ingenuity is a technology demonstration to test the first powered flight on Mars. For the first time in the history of space exploration, a craft carried from Earth will ascend from the ground of another planet into the atmosphere, fly over the surrounding area in a controlled manner and land again. This flight experiment will be repeated several times. Since the atmospheric pressure on Mars is less than one hundredth of the air pressure on Earth, Ingenuity had to be extremely light and at the same time be equipped with extremely fast-rotating rotor blades having a large surface area – driven by a small electric motor (350 watts) in order to be able to ascend at all. The drone weighs 1800 grams and has rotor blades with a wingspan of 120 centimetres. A small camera will provide colour images from a height of 10 to 15 metres. Another black-and-white camera will provide images that will be used by the small drone for navigation.
The rover's instruments
Mastcam-Z – high-definition panoramic camera with zoom
Mastcam-Z (Mast Camera, Zoom) is a multi-spectral panoramic camera with stereoscopic and zoom capabilities. It comprises two identical cameras located 24 centimetres apart on the upper end of the rover's two-metre-long remote sensing mast. From its elevated position, Mastcam-Z can capture 360-degree panoramas in 3D, mosaics, single images and videos of the Martian surface in visible colours (RGB). Each of the two Mastcam Z cameras has a zoom, focus and filter wheel mechanism. The combination of a CCD detector with 1600 by 1200 photoactive pixels and 4:1 zoom optics (f/7 wide-angle to f/10 telephoto optics) allows the camera to make objects of about three to four centimetres in size visible at a distance of about 100 metres in individual images. At close range (working range of the robot arm), the resolution is about one millimetre. The filter wheels of Mastcam-Z are also equipped with bandpass filters (400 to 1000 nanometres) that are used to distinguish unweathered and weathered materials and to provide important insights into the mineralogy of many silicates, oxides, oxyhydroxides and diagnostic hydrated minerals.
The two cameras are the rover's 'geological eyes'. The images from the cameras will allow the science team to explore the geologic history of Jezero Crater via the stratigraphy of rock outcrops and the regolith, as well as to narrow down the types of rocks present (for example, sedimentary versus igneous). The images can also be used to observe and analyse textural, mineralogical, structural and morphological details in rocks, sediments and soil material at the rover’s deployment site. Dynamic processes such as dust devils (small whirlwinds), cloud motions and astronomical phenomena can be recorded and documented on video. The cameras also serve as a backup system for the navigation cameras and can perform their tasks in the event of an emergency.
Tasks:
- Characterising the geomorphology, geological history and formation processes of the Martian surface in Jezero Crater, particularly with regard to current and past environmental conditions and habitability (suitability to sustain life over time).
- Performing contextual image surveys to select sites for the collection of rock and sediment samples (for later examination on Earth).
- Carrying out atmospheric investigations such as the observation of clouds and dust devils on Mars, the study of aerosols in the atmosphere, the investigation of aeolian transport processes in the formation of dunes, the characterisation and representation of ice- and frost-forming processes as well as documenting dynamic atmospheric processes through video recordings.
- Supplying images to support the rover operation (determination of important position data for navigation, for the exact positioning of the robot arm, etc.)
Arizona State University is responsible for the scientific management of Mastcam-Z. The science team also includes representatives from the German Aerospace Center (DLR), who are involved in the tactical and strategic image capture planning as well as the scientific evaluation and processing of data. The processing of the stereo camera's images draws on the many years of expertise of DLR's planetary researchers in Berlin, which they have acquired with camera technologies on the Mars Express, Dawn, MASCOT/Hayabusa2 and Philae/Rosetta missions.
SuperCam – remote-sensing laser to identify chemical composition
The SuperCam instrument is a combination of a camera and various spectrometers. It is an improved version of ChemCam that is installed on the Curiosity Mars rover. In addition to its camera function, which enables high-resolution contextual images in colour, SuperCam can identify the chemical composition and mineralogy of rocks, sand and dust in the rover's surroundings without contact by means of a laser (LIBS – Laser-Induced Breakdown Spectroscopy). In addition, the instrument has the capability to perform analyses using Raman and infrared spectroscopy techniques. SuperCam also features a microphone. The instrument is managed by the Los Alamos National Laboratory (LANL) in New Mexico and the Institut de Recherche en Astrophysique et Planétologie (IRAP) in Toulouse, supported by the French space agency (Centre national d’études spatiales; CNES). The Berlin-based DLR Institute of Optical Sensor Systems is involved in the analysis of these measurements.
MEDA – the Mars weather station on Perseverance
The MEDA (Mars Environmental Dynamics Analyzer) instrument consists of a number of sensors. These measure temperature, wind speed and direction, atmospheric pressure, relative humidity and, if applicable, their exchange with the Martian soil, as well as the size and shape of dust in the atmosphere. The Centro de Astrobiología in Madrid, Spain, is responsible for MEDA's scientific management. The DLR Institute of Planetary Research is involved in the calibration of the humidity sensors and data analysis. The MEDA measurements are intended to show to what extent local weather influences the functioning of Perseverance and the experiments, but also to support the preparations for future human missions to Mars.
SHERLOC – Raman spectrometer for detecting organic compounds
The SHERLOC (Scanning Habitable Environments with Raman & Luminescence for Organics & Chemicals) instrument is mounted on the rover’s robotic arm. It is a Raman spectrometer coupled to a camera and a UV laser (wavelength: 248.6 nanometres; spot size diameter of 100 micrometres) that can, among other things, identify biosignatures and organic compounds from a short distance without contact or destruction. SHERLOC has a 'visual reconnaissance partner' – the high-resolution colour camera (WATSON) to capture microscopic images of the Martian surface. This camera is based on the principles of the MAHLI magnifying camera, which is located on the robotic arm of the precursor rover Curiosity. NASA's Jet Propulsion Laboratory (JPL) in Pasadena, California, has the scientific lead for this instrument. The name is inspired by the famous detective Sherlock Holmes, who tried to solve criminal cases with forensic methodology. Noted for his magnifying glass, John H. Watson was Holmes' partner in investigating cases.
PIXL – spectrometer and camera analysis of the smallest particles
PIXL (Planetary Instrument for X-ray Lithochemistry) is an X-ray spectrometer for fine-scale analysis of the chemical composition of material on the surface of Mars. Its sensitivity can measure low concentrations of only a few ppm (parts per million) of a wide range of substances. The instrument is mounted on the turret of the robotic arm so that the X-ray measuring beam has the flexibility of a hand-held laser pointer. PIXL is also equipped with a high-resolution camera that takes close-up pictures of rock and soil textures in the same way as a powerful magnifying glass. It can see features as small as a grain of salt. The experiment is led by NASA's Jet Propulsion Laboratory (JPL) in Pasadena, California.
RIMFAX – radar for characterising the Martian subsurface
RIMFAX (Radar Imager for Mars' Subsurface Experiment) is a ground-penetrating radar mounted on the rear of Perseverance and detects the geological structure as well as ice lenses and even saline water beneath the surface of Mars. With frequencies between 150 and 1200 megahertz, the radio waves transmitted can penetrate to a depth of 10 metres or deeper, depending on the nature of the ground. After several radar experiments in orbit, RIMFAX is the first ground-penetrating radar instrument to be deployed on the surface of Mars. The scientific investigation is being led by the University of Oslo, Norway. This experiment takes its name from Hrímfaxi, the horse in Norse mythology that brings night over the land.
MOXIE – generating oxygen for future human missions to Mars
The MOXIE (Mars Oxygen In-Situ Resource Utilization Experiment) instrument is a technology demonstrator that is designed to split up to 10 grams of oxygen per hour from the carbon dioxide molecules (CO2) in the Martian atmosphere using solid oxide electrolysis. This could be used by future astronauts on Mars, for example, as a fuel component for return flights to Earth or for life support. The instrument is the size of a car battery and located inside the rover at the front, on the right. This experiment is being led by the Massachusetts Institute of Technology (MIT) in Cambridge, Massachusetts.