Ein Schwarm aus Sensoren, Rovern und Astronauten erkundet den Mond
19. Dezember 2024 | Forschungsprojekt in der LUNA-Halle
Ein Schwarm aus Sensoren, Rovern und Astronauten erkundet den Mond
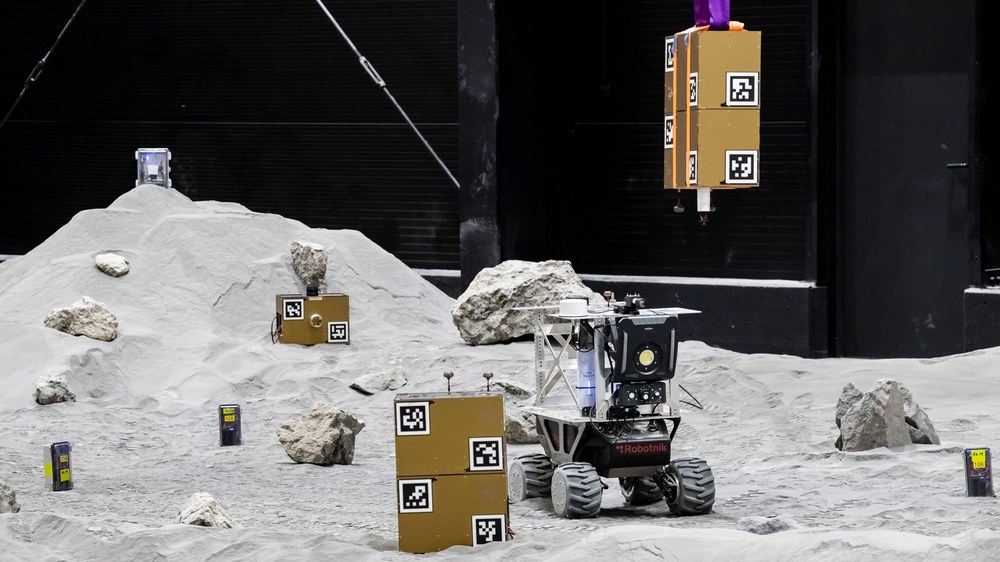
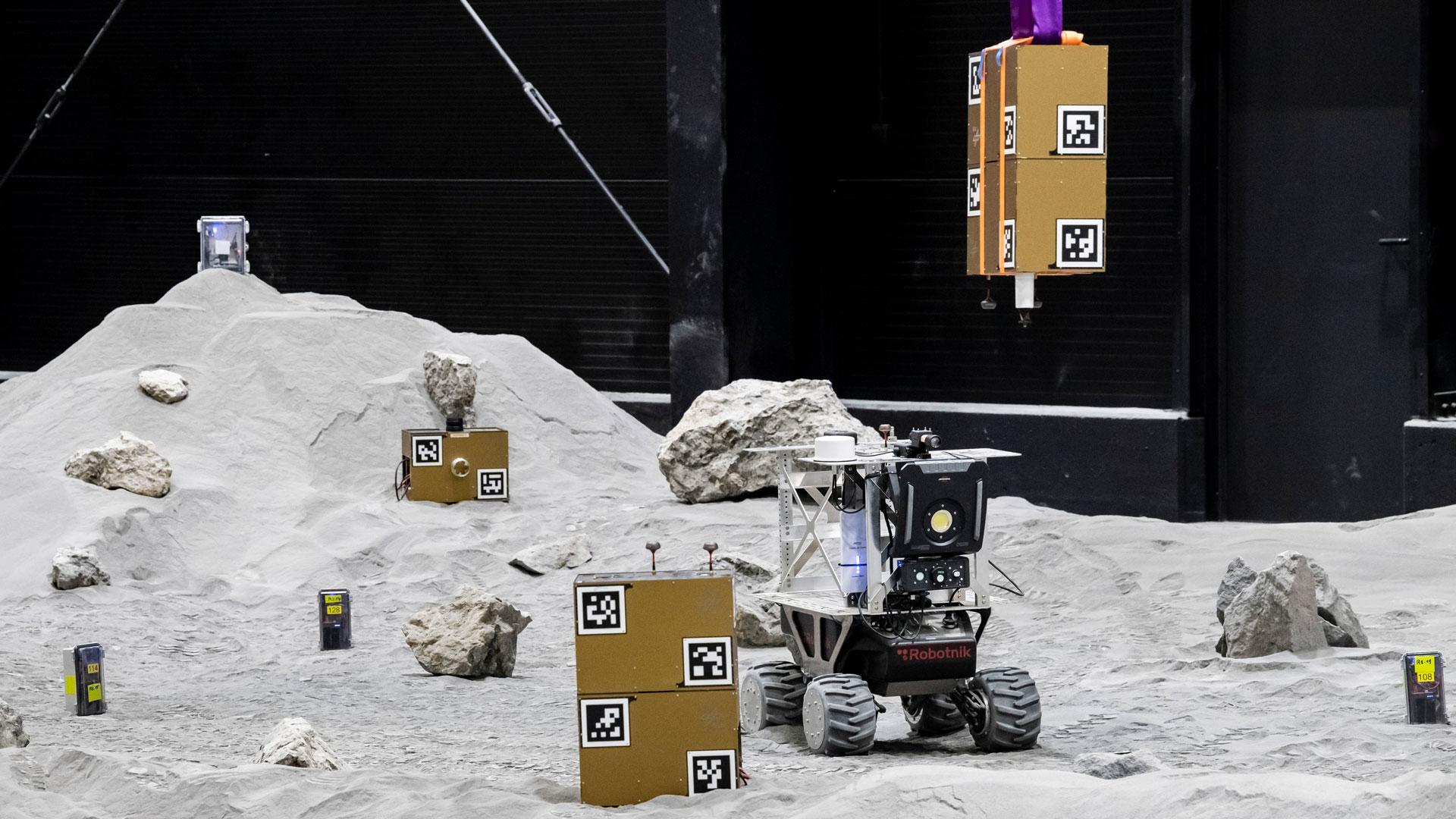
Goldfarbene Pakete in der LUNA-Halle
Das DLR-Institut für Kommunikation und Navigation hat in der LUNA-Halle ein Experiment durchgeführt, bei dem sich Nutzlast-Boxen, Sensoren und Rover zu einem Schwarmnavigationsnetzwerk verbinden. Die Teilnehmer im Netzwerk geben Informationen an die Nachbarn weiter. Darüber werden die genauen Positionen der Teilnehmer bestimmt.
Sensor-Eier als Netzwerk-Teilnehmer in der LUNA-Halle
Das DLR-Institut für Kommunikation und Navigation hat in der LUNA-Halle ein Experiment durchgeführt, bei dem sich Nutzlast-Boxen, Sensoren und Rover zu einem Schwarmnavigationsnetzwerk verbinden. Die Teilnehmer im Netzwerk geben Informationen an die Nachbarn weiter. Darüber werden die genauen Positionen der Teilnehmer bestimmt. Rund 50 Sensoren, zum Beispiel diese Sensor-Eier, wurden dazu in der LUNA-Halle verteilt.
Das DLR-Institut für Kommunikation und Navigation hat in der LUNA-Halle ein Experiment durchgeführt, bei dem sich Nutzlast-Boxen, Sensoren und Rover zu einem Schwarmnavigationsnetzwerk verbinden. Die Teilnehmer im Netzwerk geben Informationen an die Nachbarn weiter. Darüber werden die genauen Positionen der Teilnehmer bestimmt. Auch die Lichtverhältnisse auf dem Mond können in der LUNA-Halle simuliert werden.
Ein Netzwerk aus unterschiedlichen Teilnehmern, wie zum Beispiel Nutzlast-Boxen, Sensoren oder Rover, ermöglicht die Navigation und Kommunikation in unbekanntem Gelände.
Das dezentrale Funksystem benötigt keine Infrastruktur.
Unterschiedliche Explorations-Szenarien in der LUNA-Halle erstmals erfolgreich getestet.
Goldene Päckchen auf dem Mond? Nicht ganz: Das ist kein außerirdisches Geschenke-Depot, sondern ein Projekt in der LUNA-Halle. Dort hat das Deutsche Zentrum für Luft- und Raumfahrt (DLR) erforscht, wie sich Nutzlast-Boxen, Sensoren, Rover und Astronauten zu einem Netzwerk verbinden. Sie tauschen dabei Signale aus, die für die Kommunikation und die Navigation gleichzeitig verwendet werden können.
„Jeder Roboter, Sensor oder Astronaut wird zum Teilnehmer eines Netzwerks und gibt Informationen an die Nachbarn weiter. Über die Laufzeit des Funksignals zwischen den Teilnehmern bestimmen wir die Abstände untereinander. Mit unserem Verfahren bestimmen wir die exakte Position der Teilnehmer innerhalb des Netzwerks“, erklärt Projektleiter Dr. Emanuel Staudinger vom DLR-Institut für Kommunikation und Navigation. „Das System arbeitet dezentral, benötigt keinerlei Infrastruktur und ist unter anderem auf eine Vielzahl an Teilnehmern ausgelegt.“ Das am Institut entwickelte Schwarmnavigationssystem ermöglicht also zum Beispiel die Erkundung der Oberfläche von Mond und Mars. Es funktioniert aber auch in Lavahöhlen oder komplexen Umgebungen auf der Erde, wo konventionelle Systeme wie zum Beispiel Satelliten-Navigation nicht zur Verfügung stehen.
Roboter arbeiten zusammen
Emanuel Staudinger und sein Team haben das Schwarmnavigationssystem in den vergangenen Jahren auf dem Vulkan Ätna (Italien) oder in einer Lavahöhle auf Lanzarote (Spanien) erprobt. Nun konnte die Schwarmnavigation in der LUNA-Halle in einer realistischen Mondumgebung erstmals erfolgreich getestet werden. Die LUNA-Halle, die im September 2024 am DLR-Standort in Köln eröffnet wurde, simuliert die Verhältnisse auf der Mondoberfläche. „Das Forschungszentrum – ein Gemeinschaftsprojekt von DLR und der Europäischen Weltraumorganisation ESA – kann Astronautinnen und Astronauten oder Roboter für den Einsatz auf dem Mond vorbereiten“, erklärt Dr. Thomas Uhlig von der LUNA-Projektleitung. „Die Kolleginnen und Kollegen des DLR-Instituts für Kommunikation und Navigation gehören zu den Ersten, die in unserer Anlage forschen. Inzwischen haben wir viele Anfragen aus den unterschiedlichsten Gebieten für LUNA. Die Zukunft wird spannend.“
Funkeln in der LUNA-Halle
Das DLR-Institut für Kommunikation und Navigation hat in der LUNA-Halle ein Experiment durchgeführt, bei dem sich Nutzlast-Boxen, Sensoren und Rover zu einem Schwarmnavigationsnetzwerk verbinden. Die Teilnehmer im Netzwerk geben Informationen an die Nachbarn weiter. Darüber werden die genauen Positionen der Teilnehmer bestimmt. Das DLR-Team hat etwa 50 Sensoren verteilt, die mit ihren bunten Lämpchen die Halle funkeln ließen.
Die Wissenschaftlerinnen und Wissenschaftler aus Oberpfaffenhofen haben in der LUNA-Halle mehrere Szenarien dargestellt, unter anderem dieses: Ein Lander kommt auf der Mondoberfläche an und setzt zunächst zwei Rover aus. Der erste Rover hat die Aufgabe, sogenannte Funk-Baken rund um den Lander zu platzieren. Diese Sensor-Einheiten übernehmen sofort erste Navigationsaufgaben. Bei seinen Erkundungsfahrten entdeckt der Rover einen Krater und stellt fest, dass er in diesen nicht hinunterfahren kann. Er muss den zweiten Rover zur Hilfe holen. Der Krater ist in einem Bereich der LUNA-Halle, in dem der Boden um drei Meter abgesenkt ist. Der zweite Rover findet über das Navigationssystem alleine zum Krater und führt seine wissenschaftlichen Untersuchungen durch. Während der Fahrt in den Krater unterstützt der erste Rover vom Kraterrand aus den zweiten Rover bei der Orientierung. In einem anderen Szenario ging es um das Ausbringen von Sensor-Einheiten in einem Bereich, der für Rover zu steil ist. Bis zu 50 Sensoren wurden verteilt und haben sich zu einem Netzwerk für die Navigation verbunden. Auch fliegende Einheiten oder das Abwerfen der Sensoren in einen unzugänglichen Krater wurden getestet.
3D-Modell der Regolith-Oberfläche erstellt
Neben den Navigations-Experimenten hat das Team ein 3D-Modell der Halle und des Bodens für Simulationen und die Überprüfung von Messdaten angefertigt. Ein Großteil der LUNA-Halle ist mit einer Schicht aus Regolith-Simulat („Mondstaub“) bedeckt. Die Mischung hat ähnliche chemische, physikalische und geotechnische Eigenschaften wie der Regolith, der mit den Apollo-Missionen zur Erde gebracht wurde.
Das DLR-Forschungsteam wird nun die Daten detailliert auswerten und das Schwarmnavigationssystem weiterentwickeln. Ziel ist es, dass diese Art der robusten dezentralen Navigation und Kommunikation künftig Astronautinnen und Astronauten sowie Robotern bei der Exploration des Mondes zur Verfügung steht – und gleichzeitig auf der Erde bei der Erkundung von schwierigem Terrain hilft.
In der LUNA Analog Facility in Köln wurden unterschiedliche Explorations-Szenarien erfolgreich getestet. Das DLR-Institut für Kommunikation und Navigation hat dafür in der LUNA-Halle Nutzlast-Boxen, Sensoren und Rover zu einem Schwarmnavigationsnetzwerk verbunden. Diese geben Informationen an die Nachbarn weiter. Darüber werden die genauen Positionen der Teilnehmer bestimmt. Das dezentrale Funksystem benötigt keine Infrastruktur. So wird Navigation und Kommunikation in unbekanntem Gelände, zum Beispiel auf dem Mond oder dem Mars, möglich.
Video: Schwarmnavigation in der LUNA-Halle
Für die Wiedergabe dieses Videos auf Youtube.com ist Ihre Zustimmung zur Speicherung von Daten ('Cookies') erforderlich. Unter Datenschutz-Einstellungen können Sie Ihre Wahl einsehen und verändern.
Video: Schwarmnavigation in der LUNA-Halle
In der LUNA Analog Facility in Köln wurden unterschiedliche Explorations-Szenarien erfolgreich getestet. Das DLR-Institut für Kommunikation und Navigation hat dafür in der LUNA-Halle Nutzlast-Boxen, Sensoren und Rover zu einem Schwarmnavigationsnetzwerk verbunden. Diese geben Informationen an die Nachbarn weiter. Darüber werden die genauen Positionen der Teilnehmer bestimmt. Das dezentrale Funksystem benötigt keine Infrastruktur. So wird Navigation und Kommunikation in unbekanntem Gelände, zum Beispiel auf dem Mond oder dem Mars, möglich.




{kind=link}
{kind=link}
{kind=link}
{kind=link}