A swarm of sensors, rovers and astronauts explore the 'Moon'
December 19, 2024 | Research project in the LUNA hall
A swarm of sensors, rovers and astronauts explore the 'Moon'
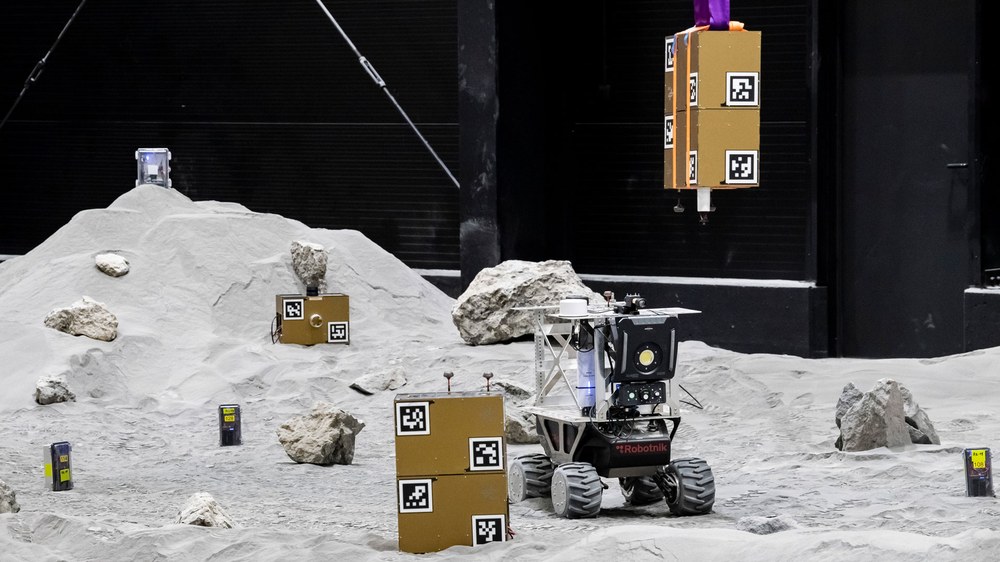
Gold-coloured packages in the LUNA hall
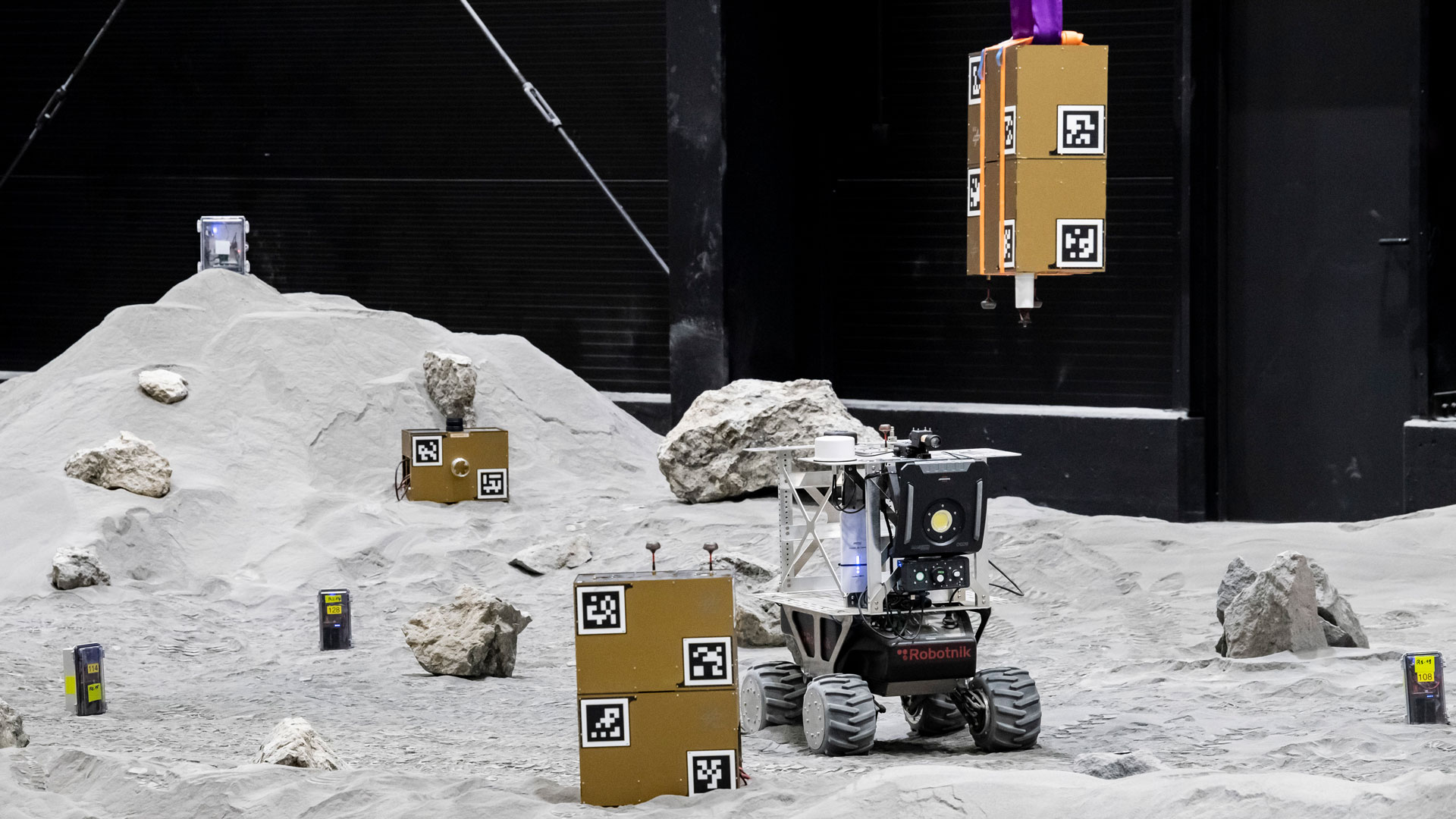
The DLR Institute of Communications and Navigation has carried out an experiment in the LUNA hall, where payload boxes, sensors and rovers connect to form a swarm navigation network. Within the network, participants exchange information with their neighbours, enabling the precise determination of their positions.
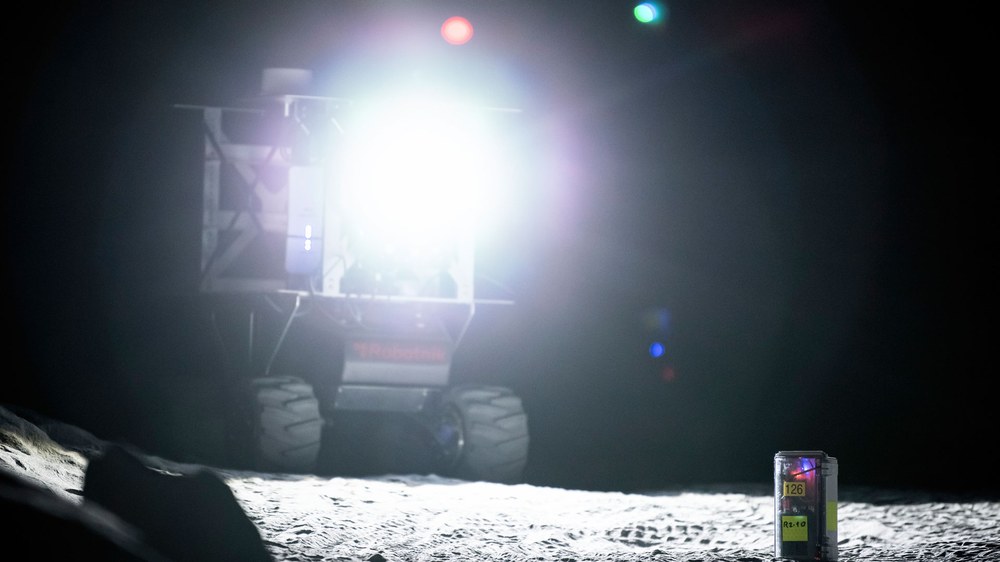
The DLR Institute of Communications and Navigation has carried out an experiment in the LUNA hall, where payload boxes, sensors and rovers were integrated into a swarm navigation network. Within the network, participants exchange information with their neighbours, enabling the precise determination of their positions. Around 50 sensors, including these 'sensor-eggs', were distributed across the LUNA hall for this purpose.
The DLR Institute of Communications and Navigation has carried out an experiment in the LUNA hall, in which payload boxes, sensors and rovers were integrated into a swarm navigation network. Within the network, participants exchange information with their neighbours, enabling the precise determination of their positions. The LUNA hall can also simulate the lighting conditions found on the Moon.
A network of varying devices enables navigation and communication in uncharted terrain.
The decentralised radio system requires no infrastructure.
Various exploration scenarios have been successfully tested in the LUNA hall for the first time.
Focus: Space, the Moon, navigation, exploration, robotics
Golden packages on the Moon? Not exactly. This is no extraterrestrial gift depot, but a cutting-edge project in the LUNA hall. Here, the German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt; DLR) has been researching how payload boxes, sensors, rovers and astronauts can connect to form an integrated network. These participants, or nodes within the network, exchange signals that facilitate both communication and navigation.
"Every robot, sensor or astronaut becomes a participant in the network, passing on information to its neighbours. We calculate the distances between participants by measuring the time it takes for radio signals to travel between them. Using this method, we can determine the exact positions of all participants within the network," explains Emanuel Staudinger, project manager at the DLR Institute of Communications and Navigation. "The system is decentralised, requires no infrastructure and is designed to accommodate a large number of participants." The swarm navigation network developed by the institute could be used to explore the surfaces of the Moon and Mars. It is also effective in environments on Earth where conventional systems such as satellite navigation are not available, for example in lava caves or other complex terrains.
Robots working together
Staudinger and his team have spent recent years testing the swarm navigation network in diverse terrains, including Mount Etna in Italy and a lava cave on Lanzarote, Spain. Now, for the first time, the swarm navigation network has been successfully tested in the LUNA hall, which simulates a realistic lunar environment. Opened at the DLR site in Cologne in September 2024, LUNA simulates conditions on the lunar surface. "The research centre – a joint project between DLR and the European Space Agency (ESA) – is designed to prepare astronauts and robots for Moon missions," explains Thomas Uhlig from the LUNA project management team. "Our colleagues from the DLR Institute of Communications and Navigation are among the first to conduct research here. We’ve already received numerous requests from a wide range of fields for access to LUNA. The future looks exciting."
Twinkling in the LUNA hall
The DLR Institute of Communications and Navigation has carried out an experiment in the LUNA hall, in which payload boxes, sensors and rovers were integrated into a swarm navigation network. Within the network, participants exchange information with their neighbours, enabling the precise determination of their positions. The DLR team distributed around 50 sensors throughout the hall, their colourful lights making the space sparkle.
In the LUNA hall, scientists from the institute in Oberpfaffenhofen demonstrated several scenarios, including one in which a lander arrives on the lunar surface and deploys two rovers. The first rover was tasked with placing radio beacons around the lander. These sensor units immediately then assumed navigation tasks. During its exploratory trips, the rover discovered a crater but realised it could not descend into it, so called for assistance from the second rover. This crater is located in a section of the LUNA hall where the floor has been lowered three metres. Using the navigation system, the second rover found its way to the crater on its own and carried out scientific investigations. As it descended, the first rover assisted from the crater's edge, guiding the second rover with navigation data. Another scenario involved deploying sensor units in an area too steep for a rover to traverse. Here, up to 50 sensors were distributed and interconnected to form a navigation network. The team also tested flying units or dropping the sensors into an inaccessible crater.
3D model of the regolith surface created
In addition to the navigation experiments, the team developed a 3D model of the LUNA floor to support simulations and validate measurement data. A significant portion of the hall is covered with a layer of regolith simulant, or 'Moon dust'. This material mimics the chemical, physical and geological properties of the regolith samples brought back to Earth by the Apollo missions.
The research team from the DLR institute will now analyse the data in detail and continue refining the swarm navigation network. The ultimate goal is to provide robust, decentralised navigation and communication capabilities for astronauts and robots exploring the Moon. These advancements could also prove invaluable for terrestrial missions in challenging and inaccessible environments.
Various exploration scenarios were successfully tested for the first time in the new LUNA analogue facility in Cologne. To this end, the DLR Institute of Communications and Navigation connected various participants, such as payload boxes, sensors and rovers, to a swarm navigation network in the LUNA hall. These pass information on to their neighbours. The exact positions of the participants are determined using this information. The decentralised radio system requires no infrastructure. This makes navigation and communication possible in unknown terrain, such as on the Moon or Mars.
Video: Swarm Navigation in LUNA Facility
Your consent to the storage of data ('cookies') is required for the playback of this video on Youtube.com. You can view and change your current data storage settings at any time under privacy.
Video: Swarm Navigation in LUNA Facility
Various exploration scenarios were successfully tested for the first time in the new LUNA analogue facility in Cologne. To this end, the DLR Institute of Communications and Navigation connected various participants, such as payload boxes, sensors and rovers, to a swarm navigation network in the LUNA hall. These pass information on to their neighbours. The exact positions of the participants are determined using this information. The decentralised radio system requires no infrastructure. This makes navigation and communication possible in unknown terrain, such as on the Moon or Mars.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
