The DLR MiroSurge is a molular system for minimally invasive robotic telesurgery. It combines several robotic components, including three robot arms MIRO and at least two instruments MICA. In 2010 MiroSurge was presented to the public for the first time.
3 × MIRO robot arms, each with 7 degrees of freedom
at least 2 × MICA instruments, each with 3 degrees of freedom
operating table with 7 degrees of freedom
2 × Sigma7 input devices, each with 7 degrees of freedom
Specifics:
Wolf stereo endoscope
≥ 10 real time QNX computers
System description
The telesurgery system DLR MiroSurge includes a surgeon console with a 3D-display and two haptic input devices and three MIRO robot arms. Two MIROs move the laparoscopic instruments MICA, the third MIRO guides a stereo endoscope. Both the video stream from the stereo endoscope and the workspace limits of the robotic instruments can be displayed to the surgeon at the surgeon console. Therefore the surgeon can not only see the situation in the operating field but thanks to force feedback also partially feel it at the haptic input devices.
Laboratory setup of the MiroSurge system 1
The DLR MiroSurge Research platform for minimally invasive surgery: Two Robot arms carry robotic instruments DLR MICA, the third arm the endoscope (black). Due to their low weight, the MIROs can be attached directly to the side rails of the OR table.
Laboratory setup of the MiroSurge system, seen from the head of the “patient”: The three robot arms are attached to the side rails of the operating room table, the tips of the endoscope (middle) and the two MICA instruments are inserted into the patient via trocars.
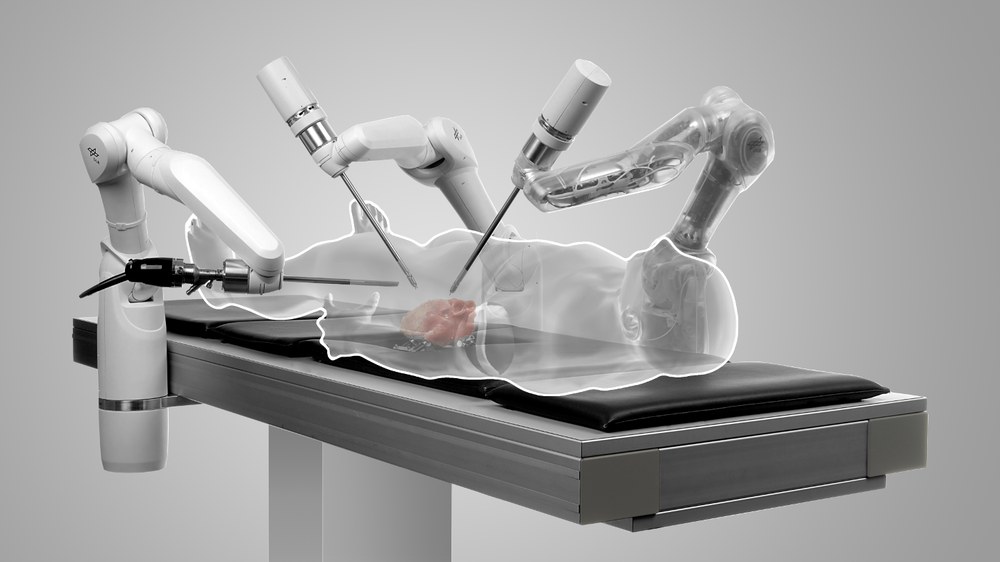
Artwork of a minimally invasive intervention with the DLR MiroSurge system: The left DLR MIRO holds the endoscope and each of the two MIROs on the right a DLR MICA instrument for minimally invasive surgery.
Tobergte et al., "The sigma.7 haptic interface for MiroSurge: A new bi-manual surgical console" in Proc. of the IEEE International Conference on Intelligent Robots and Systems (IROS), San Francisco, USA, pp. 3023-3030, September 2011.
Tobergte et al., "MiroSurge - Advanced User Interaction Modalities in Minimally Invasive Robotic Surgery", MIT Press Journals: PRESENCE - Teleoperators and Virtual Environments, vol. 19, no. 5, pp. 400-414, October 2010.
Hagn et al., "DLR MiroSurge - A Versatile System for Research in Endoscopic Telesurgery", International Journal of Computer Assisted Radiology and Surgery, vol. 5, no. 2, pp. 183-193, March 2010.





{kind=link}
{kind=link}
{kind=link}