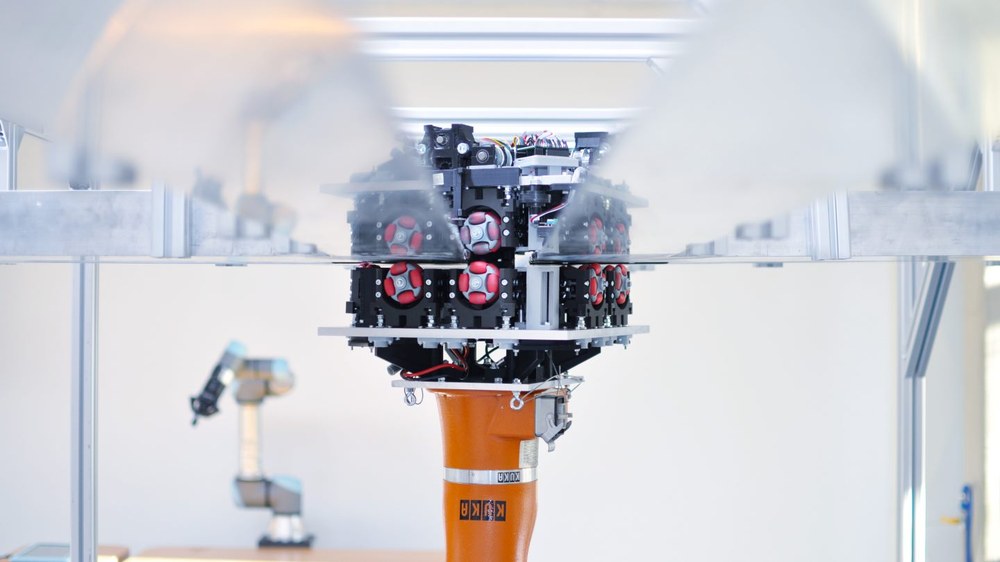
SwarmRail is a novel solution for overhead manipulation from a mobile unit driving in an above-ground rail structure.
The system was presented to the public for the first time at the ICRA 2020.
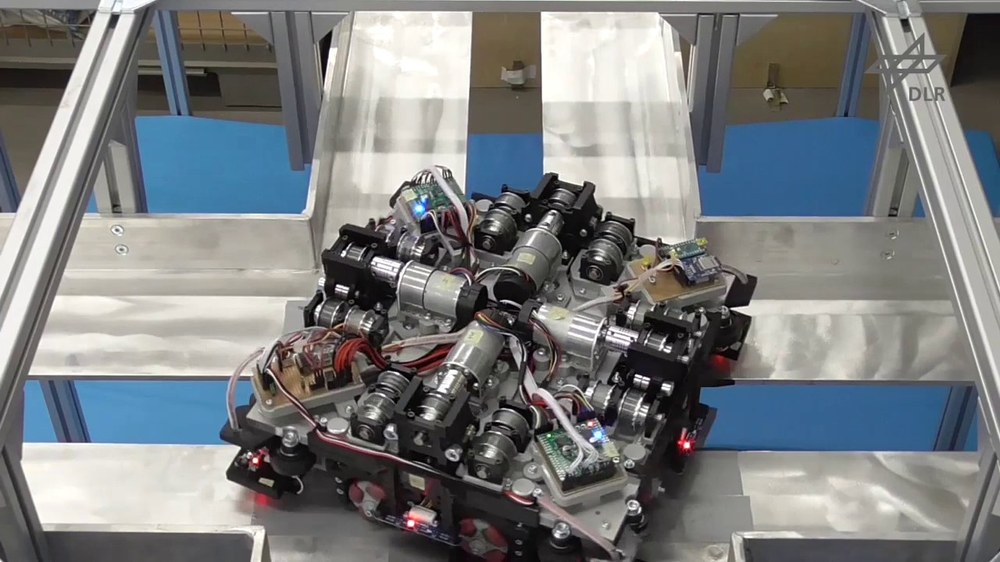
Specifications of the Functional Demonstrator
size:
362 mm × 362 mm × 263 mm (l × w × h)
mass:
~ 17.5 kg
max. speed:
0.5 m/s
payload:
10 kg
motors:
4 x brushed DC gearmotor (Pololu 4752)
sensors:
4 × IR gap detection (EXP-R63-145) 8 × IR edge detection (Iduino ST1081) 1 × IMU (6DOF MPU6050)
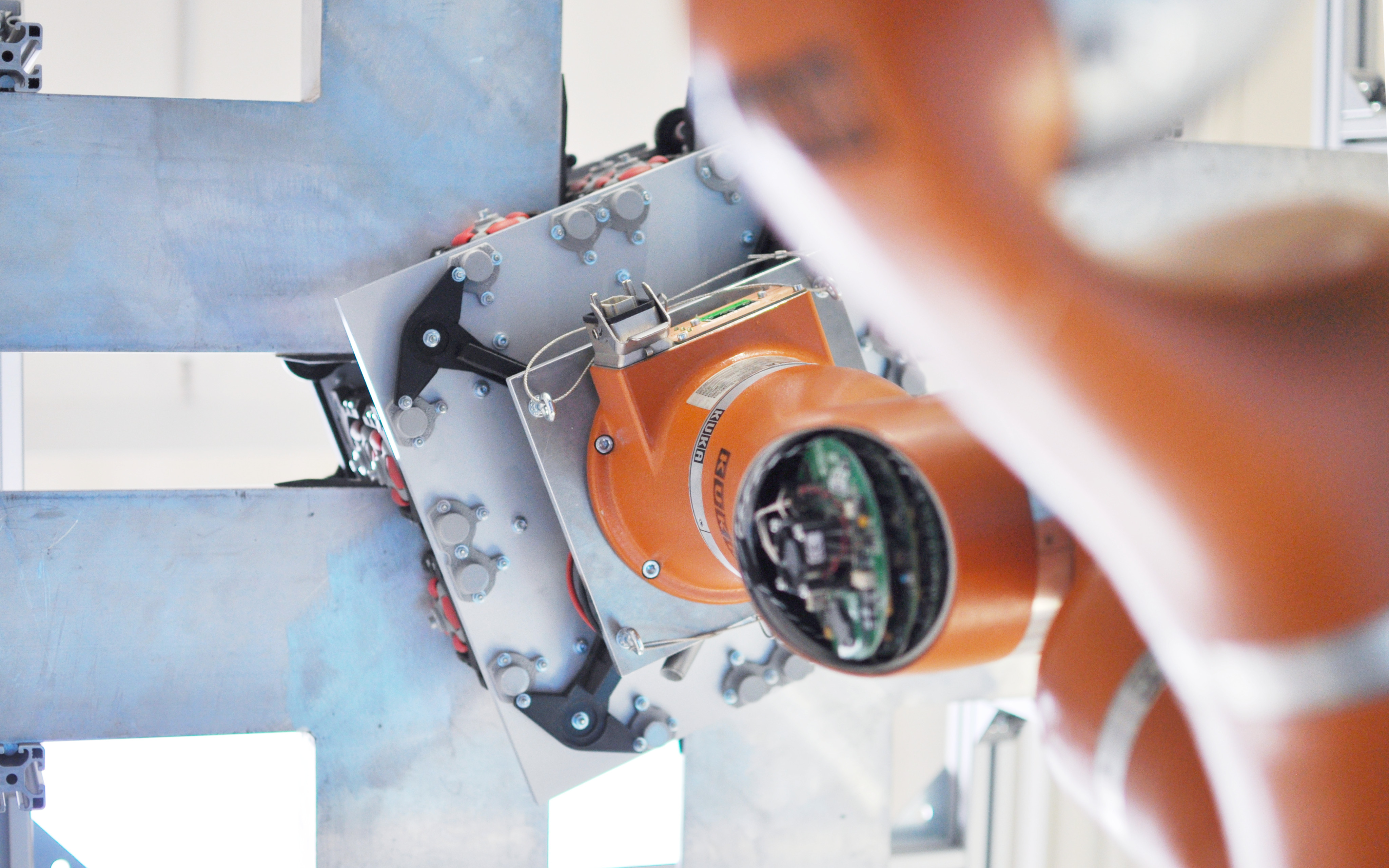
wheels:
8 × driven omni-wheels (Rotacaster R2-0504-60) 8 × passive omni-wheels on lower part
CPU:
Arduino Mega 2560
control frequency:
100 Hz
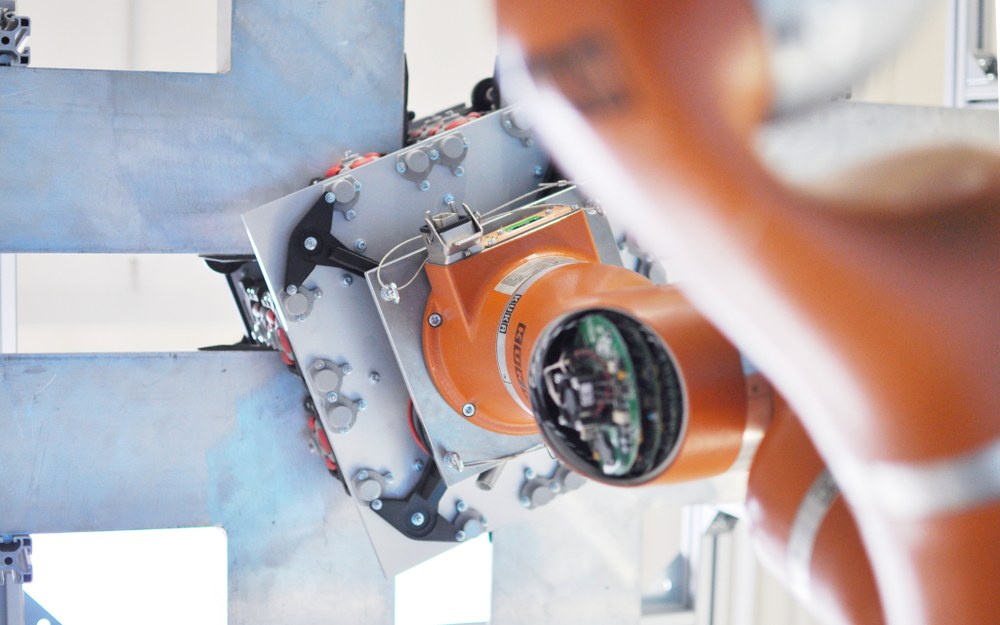
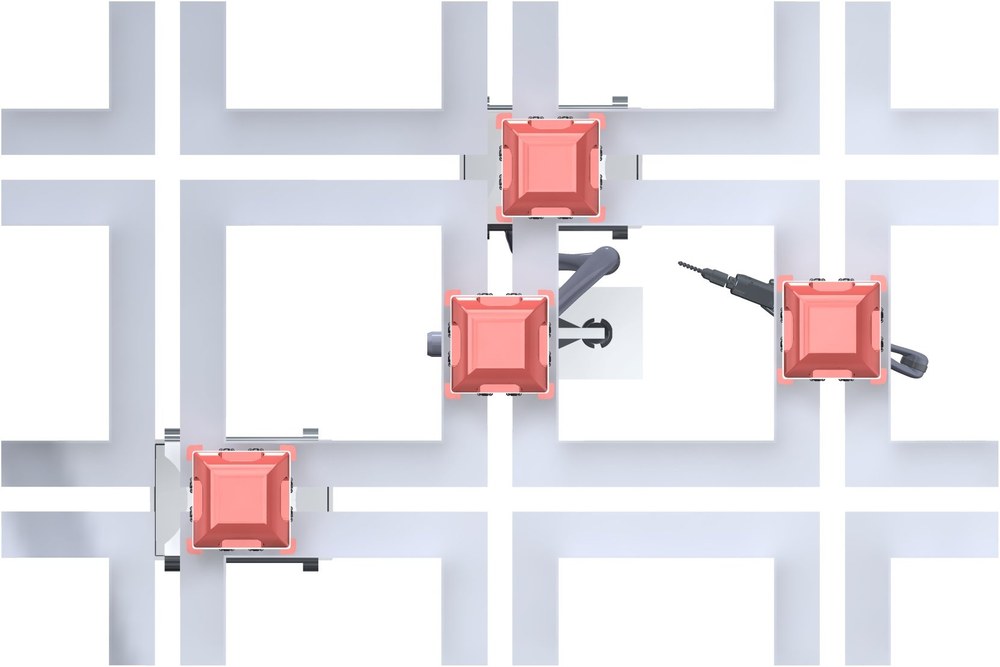
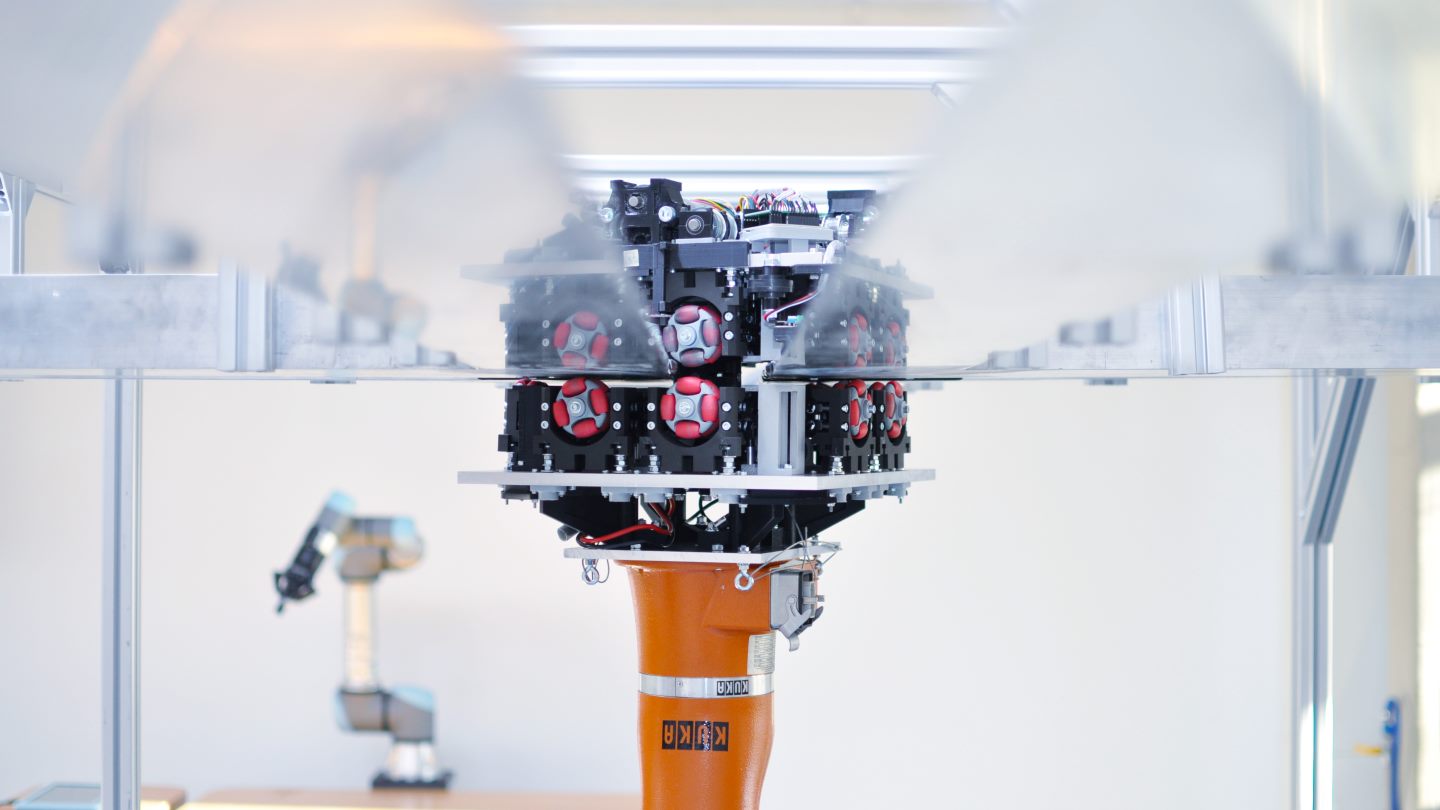
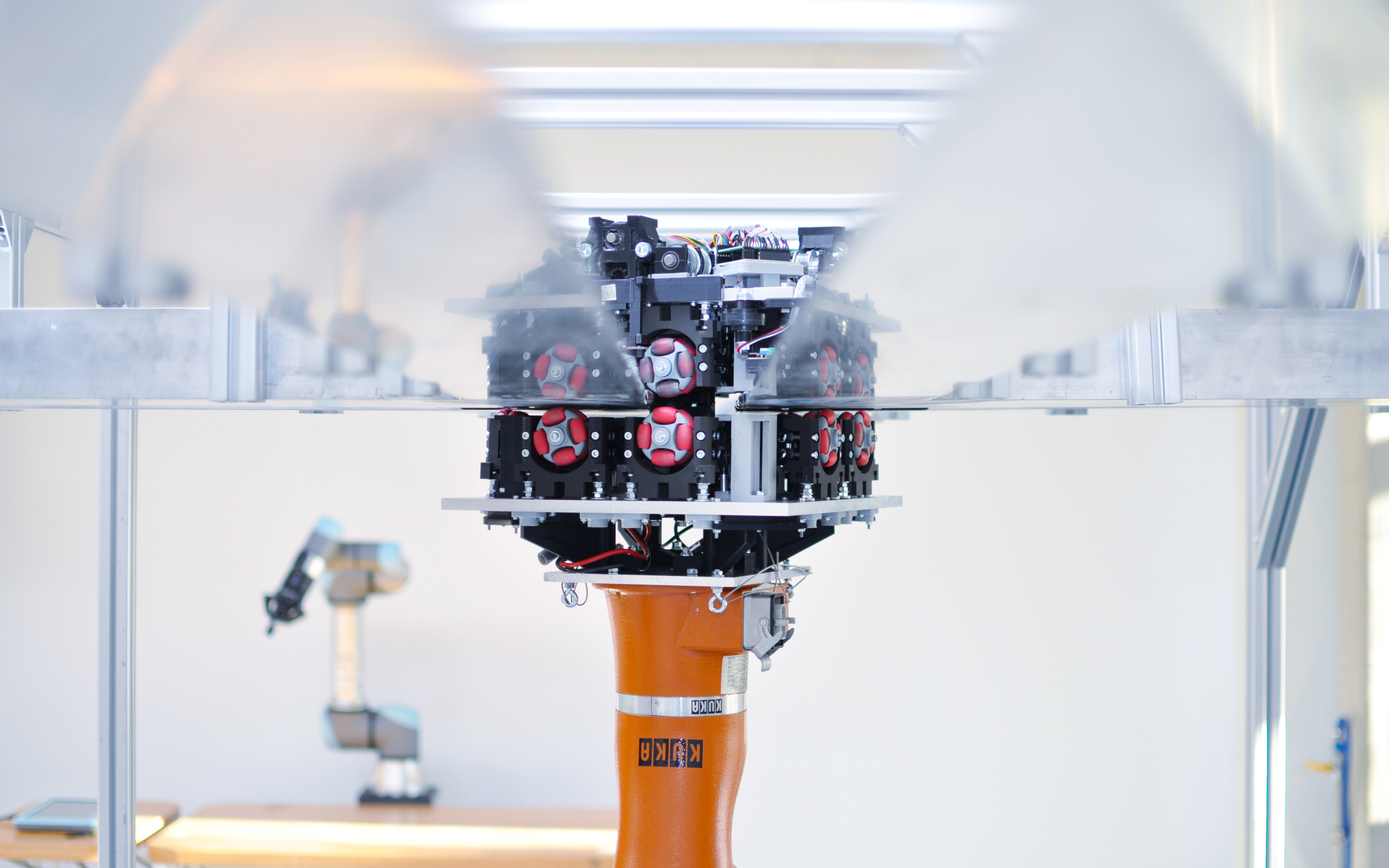
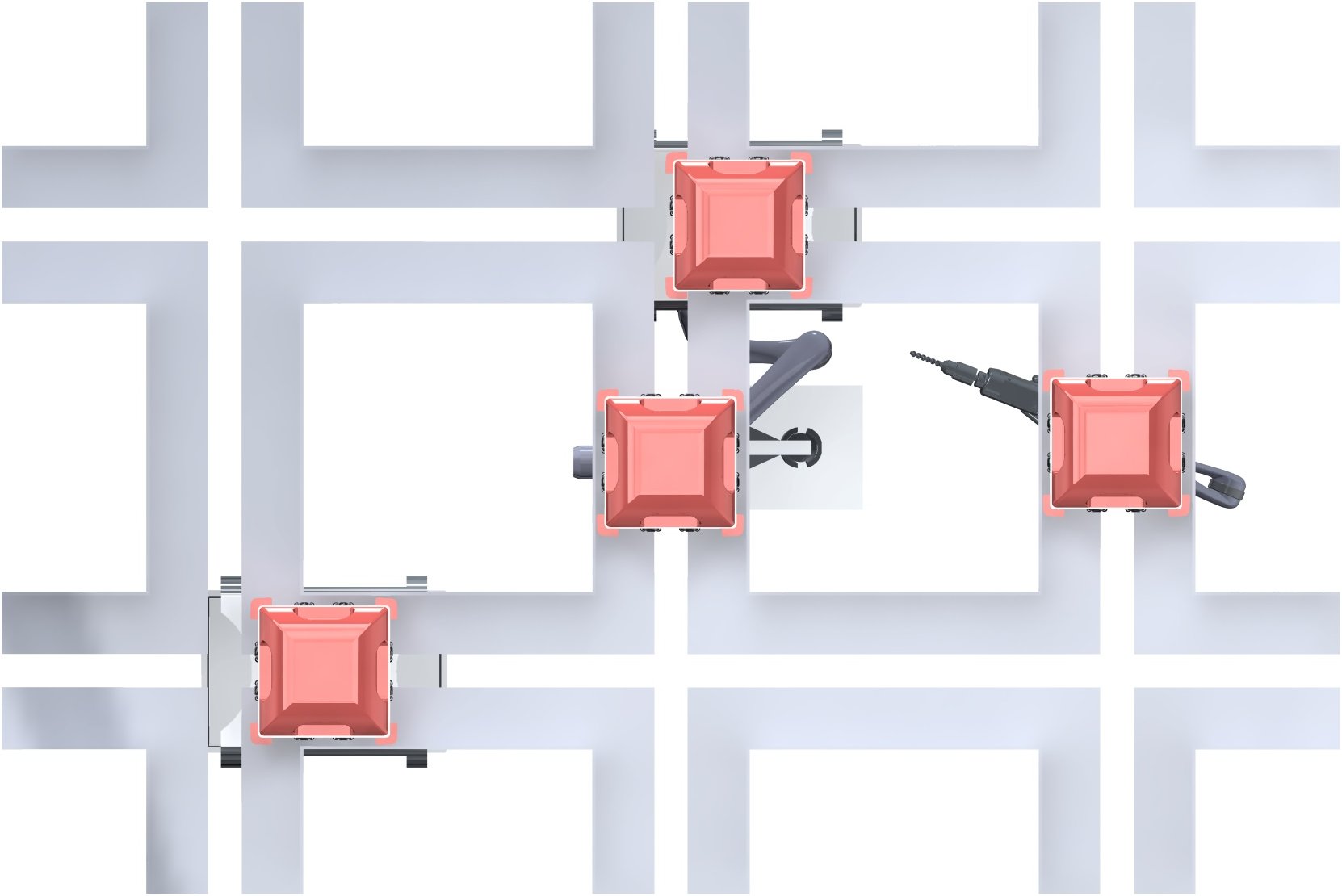
System description
The SwarmRail-concept is based on the combination of omnidirectional mobile platform and L-shaped rail profiles that form a through-going central gap. This gap makes possible mounting a robotic manipulator arm overhead at the underside of the mobile platform. Compared to existing solutions, SwarmRail enables continuous overhead manipulation while traversing rail crossings. It also can be operated in a robot swarm, as it allows for concurrent operation of a group of mobile SwarmRail units inside a single rail network. Experiments on a first functional demonstrator confirm the functional capability of the concept. Potential fields of applications reach from industry over logistics to vertical farming.
Video
Your consent to the storage of data ('cookies') is required for the playback of this video on Youtube.com. You can view and change your current data storage settings at any time under privacy.



{kind=link}
{kind=link}
{kind=link}
{kind=link}