
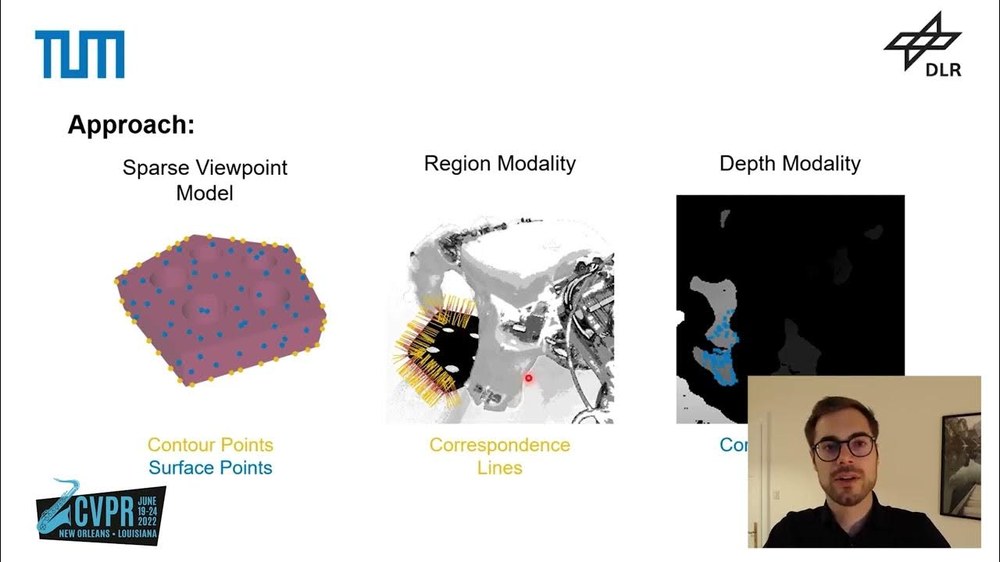
Iterative Corresponding Geometry: Fusing Region and Depth for Highly Efficient 3D Tracking of Textureless Objects
For more details, please check the paper and our source code: https://openaccess.thecvf.com/content/CVPR2022/papers/Stoiber_Iterative_Corresponding_Geometry_Fusing_Region_and_Depth_for_Highly_Efficient_CVPR_2022_paper.pdf https://github.com/DLR-RM/3DObjectTracking/tree/master/ICG
Iterative Corresponding Geometry - Presentation CVPR 2022
Iterative Corresponding Geometry - Presentation CVPR 2022
For more details, please check the paper and our source code: https://openaccess.thecvf.com/content/CVPR2022/papers/Stoiber_Iterative_Corresponding_Geometry_Fusing_Region_and_Depth_for_Highly_Efficient_CVPR_2022_paper.pdf https://github.com/DLR-RM/3DObjectTracking/tree/master/ICG
Credit:
For more details, please check the paper and our source code: https://github.com/DLR-RM/3DObjectTracking
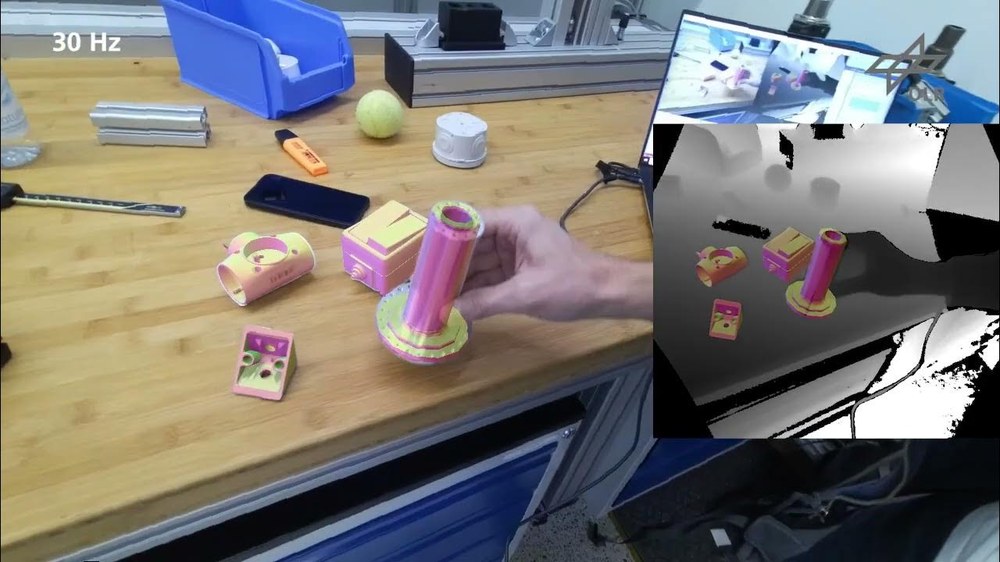
Iterative Corresponding Geometry (ICG) - Highly Efficient 3D Object Tracking - CVPR 2022
Iterative Corresponding Geometry (ICG) - Highly Efficient 3D Object Tracking - CVPR 2022
For more details, please check the paper and our source code: https://github.com/DLR-RM/3DObjectTracking
Credit: