Autonomous Robotic Networks to Help Modern Societies
ARCHES
Credit:
PR
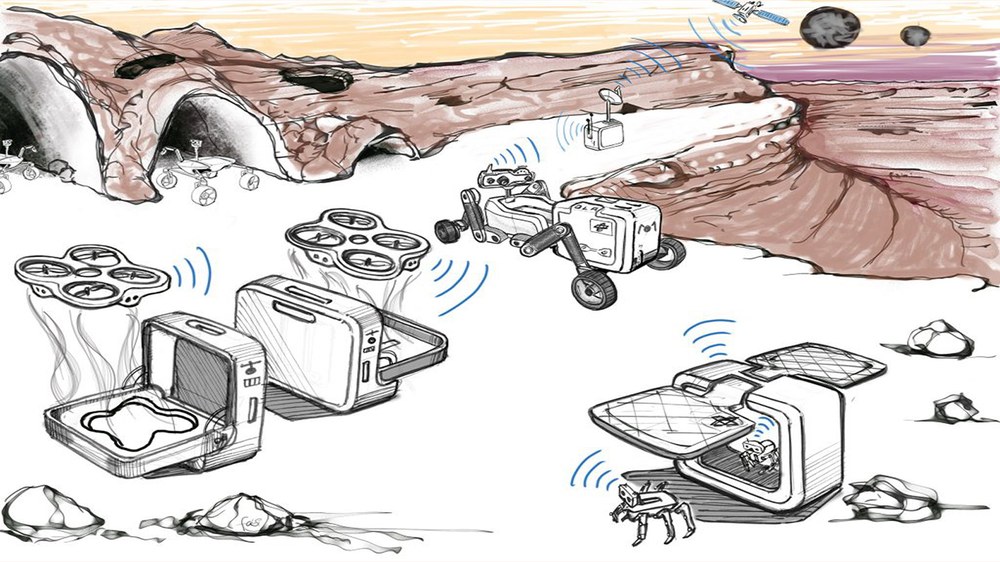
The aim of the ARCHES project (Autonomous Robotic Networks to Help Modern Societies) is to research key robotic systems, for example from space exploration, across domains and disciplines in order to create a basis for overcoming social challenges. The focus is on the development of technological foundations and solutions for looming social challenges that require large-scale monitoring and direct intervention as an extended arm of the human.
Autonomous, networked robotic systems are becoming increasingly important for both industry and science. The joint mission raises questions in particular by the Helmholtz Association of German Research Centers to develop solutions for strategic societal challenges. Whether for system understanding and environmental monitoring of the oceans, technical crisis intervention, the dismantling of nuclear facilities or the exploration of the solar system, continuous, long-term and extensive data acquisition as well as direct manipulation and interaction with the environment are possible only through the use of autonomous, networked robotic systems. There is therefore an urgent need to develop key robotic technologies and methods that enable large-scale monitoring and object manipulation in cross-domain fields of application. With ARCHES, we aim to use a Helmholtz competence network to unite the various and very specific robotic developments of three Helmholtz research divisions (ocean exploration, dismantling of nuclear power plants and space exploration) and thereby achieve a technological leap in Germany and beyond.
ARCHES aims to create robot hardware that can meet the characteristically rigorous requirements for robustness and reliability in all three domains. By developing configurable carrier systems as well as sensor and manipulator modules that can be exchanged between the domains, the aim is to optimally use the synergy potential of the competence network. In addition, there will be a focus on research into methods for the joint analysis and interpretation of data by the robots in the network. The intelligent automation and cooperation of the systems will also play a central role. Both aspects are essential, since independent operation of the robot network is a basic requirement for all three applications considered. This results in the motivation to research approaches for autonomous navigation in unknown territories, intelligent interaction with the environment, self-sufficient energy management and self-organization of communication with mission control and within the network. For interaction with humans, an interface for planning the mission and organizing the robots must be created. Here, too, we strive to develop common solutions and mutually compatible interfaces across domains in ARCHES.
ARCHES is also creating a future foundation with which further fields of application in medicine and therapy, logistics and autonomous urban traffic can be developed. For example, an autonomous robot transport network can contribute in the long term to ensuring the independence of individuals as well as the mobility and supply of provisions to an increasingly aging society.
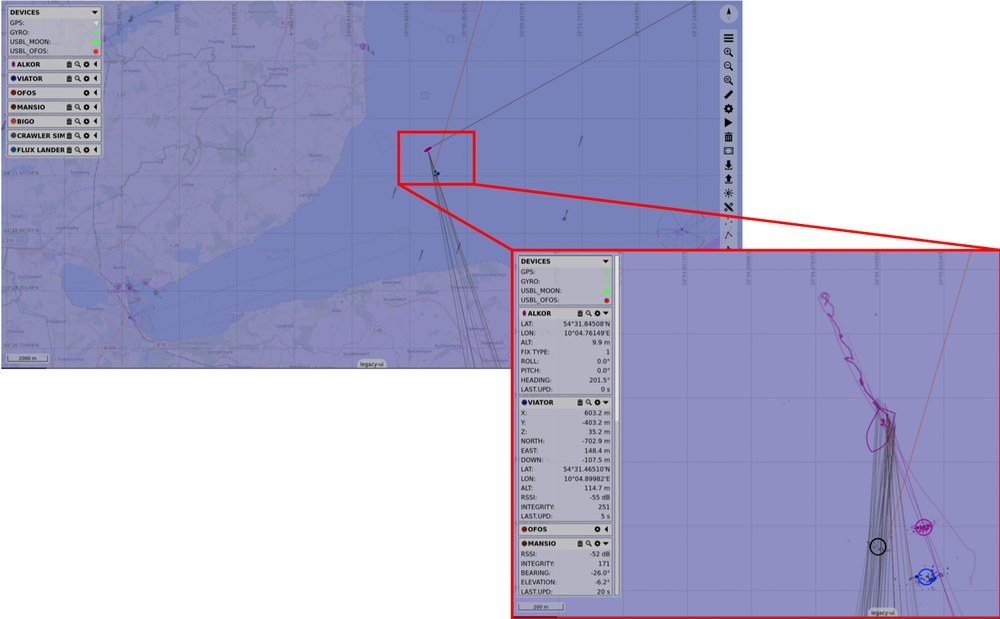
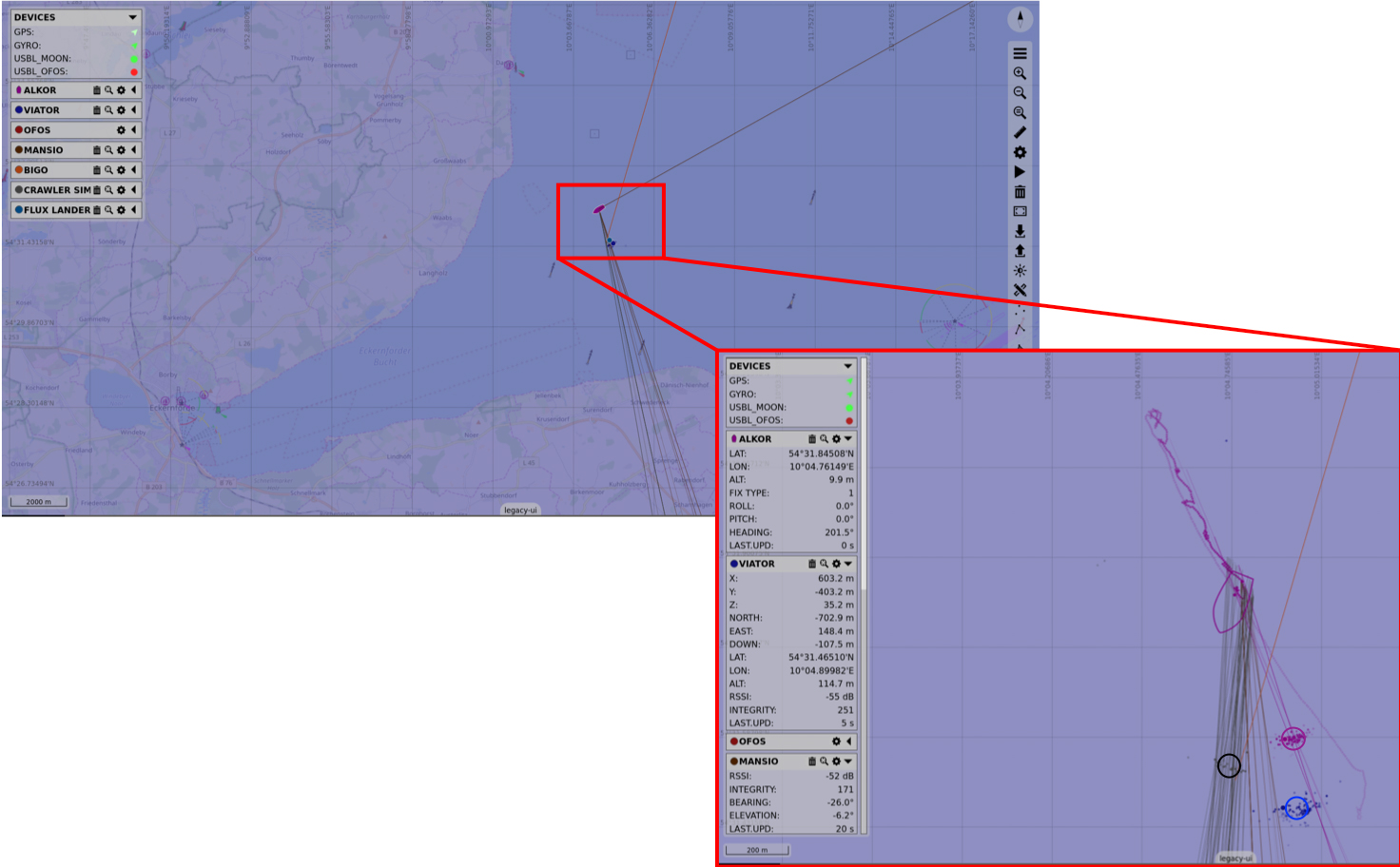
Research project ARCHES: Successful mission on the high sea
The future project ARCHES financed by the Helmholtz Association culminates in the development of a heterogeneous, autonomously interacting robotic network for underwater use, the applicability of which was tested during a demo mission in October 2020. The aim was to show that the different measurement platforms can communicate with each other and that the measurement network reacts autonomously to environmental changes and changes its measurement strategy according to a given protocol.



{kind=link}
{kind=link}