
Master student in robotics, computer science or computer graphics (f/m/x): Long-Range Robot Detection for Multi-Robot Outdoor SLAM
What to expect:
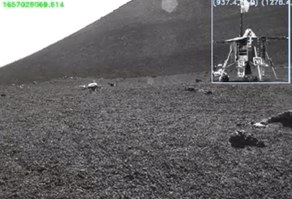
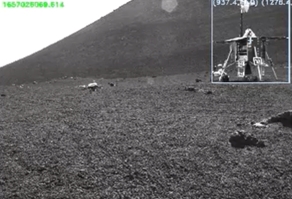
Simultaneous Localization and Mapping (SLAM) is a critical skill for a mobile robotic system to operate autonomously in a GNSS-denied environment, such as planetary bodies. When a team of robots, as opposed to a single agent, is performing collaborative SLAM, a necessary ability is the one to detect the other systems belonging to the team using camera images, and estimate a relative pose between them. This translates directly into the SLAM graph as a pose constraint that allows to join the maps from the respective systems into a combined representation. Traditionally, 6D pose estimation is performed by observing markers (e.g. AprilTag) rigidly attached to each one’s body. This approach severely limits the range at which systems can detect each other, thus introducing the need of “marker-less” solutions.
The objective of this thesis work is to design a “marker-less” inter-robot detection strategy, that makes use of prior knowledge (appearance and geometry) to establish constraints in a 3D-to-2D fashion (e.g. image to shape). To this end, the usage of modern Deep Learning strategies is encouraged, including a first image-based segmentation, followed by shape alignment. This work will result in a software module running onboard a real planetary analogous mobile robot, and will be additionally tested on data recorded during a planetary analogue test campaign.


{kind=link}
{kind=link}
What we expect from you:
- Bachelor’s degree in Computer Science, Electrical Engineering, Robotics Engineering or a similar
- Solid knowledge on visual Simultaneous Localization and Mapping approaches
- Solid knowledge on image processing techniques and pattern recognition (e.g. feature detection and matching)
- Very good Python, and good C++ coding skills
- Knowledge on Deep Learning approaches for image processing, and experience with the PyTorch library
- Fluency with the English language
- Intent to disseminate the results of this work through publications in relevant computer vision or robotics conferences
To apply for this position, please include a resume and transcript of grades.
Further information:
Starting date: Immediate
Duration of contract: 6 months