Die Positionsbestimmung in Gebäuden und anderen Umgebungen, in denen der Empfang von GNSS (Global Navigation Satellite System) schwierig ist, erfordert eine Kombination von Sensoren und anderen Informationen, wie z. B. Gebäudeplänen, um genau zu funktionieren.
Wir verfolgen Ansätze zur Sensorfusion, die GNSS, fußmontierte Trägheitssensoren, elektronische Kompasse, Baro-Höhenmesser, Karten, aktive RFID-Etiketten (Radio Frequency Identification) und Ultrabreitband-Sender und -Empfänger (UWB) kombinieren. Eine besonders leistungsfähige Kombination ist die INS-Schrittmessung in Verbindung mit Karten, die nach weniger als einer Minute Bewegung zur richtigen Position konvergieren kann.
Wir haben eine zweischichtige Architektur für die Sensorfusion entwickelt, die mit einem Kalman-Filter arbeitet, wo dies möglich ist, und andere Sensoren und Karten mit einem Partikelfilter auf höherer Ebene und niedrigerer Rate fusioniert. Darüber hinaus haben wir eine ähnliche Architektur für das gleichzeitige Erlernen begehbarer Bereiche der Umgebung (Foot Mounted Simulatenous Localization and Mapping - FootSLAM) mit einem am Fuß platzierten Inertialsensor entwickelt, wenn keine Karte oder kein Grundriss verfügbar ist. In jüngerer Zeit haben wir andere Sensorpositionen am Körper des Fußgängers untersucht, z. B. in der Tasche (Pocket Navigation und SLAM) und die Kombination mehrerer Sensoren am Körper (Multi-Inertial Navigation).
Projekte zur Innenraum-Navigation für professionelle Anwendungen
RESCUER - first RESponder-Centered support toolkit for operation in adverse and infrastruUcture-less EnviRonments
Im Rahmen des Projekts RESCUER wird ein auf Ersthelfer ausgerichtetes Technologie-Toolkit entwickelt, um die Einsatzfähigkeit und Sicherheit von Ersthelfern zu verbessern. Das Toolkit wird speziell für widrige Umwelt- und Infrastrukturbedingungen entwickelt. Es wird Sinneserweiterung, präzise und infrastrukturlose Selbstpositionierung, kognitive Unterstützung und multisensorische AR-Schnittstellen sowie robuste Ad-hoc-Kommunikation innerhalb von Teams für den verbalen und Datenaustausch bieten.
Das DLR wird im Rahmen von RESCUER ein GNSS-Lokalisierungswerkzeug für die Datenfusion mit Trägheits- und visuellen Navigationswerkzeugen entwickeln.
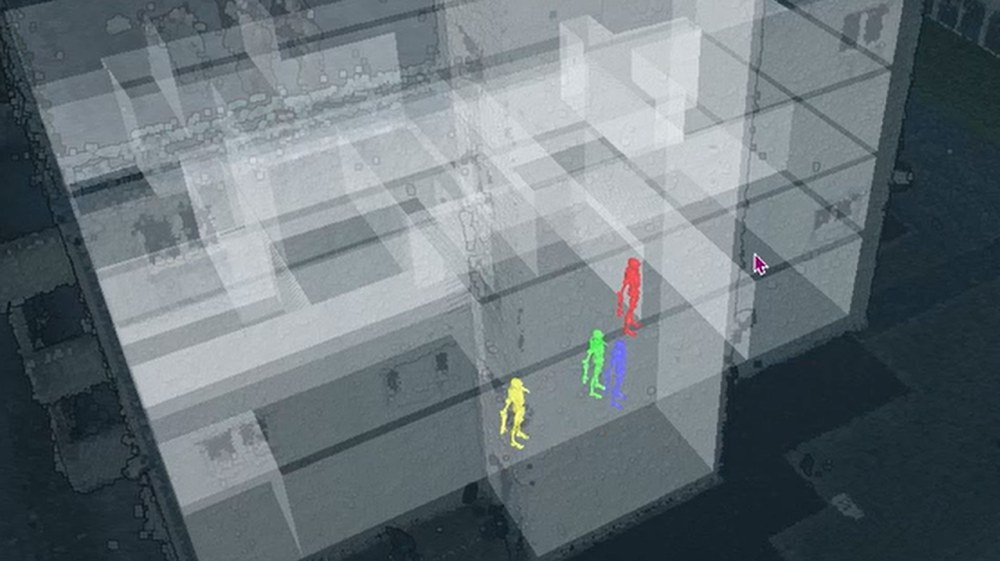
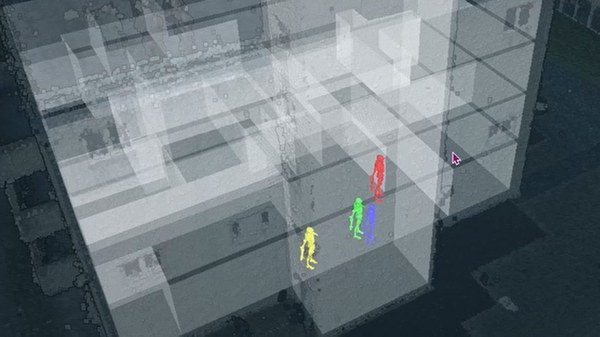
Bei mehreren Tests wurden Einsatzkräfte über ein Tracking-System erkannt. Das Projekt ComInA verknüpft DLR-Technologien zur Ortung und Kartierung. So soll eine effiziente Koordination der Personen umgesetzt werden.
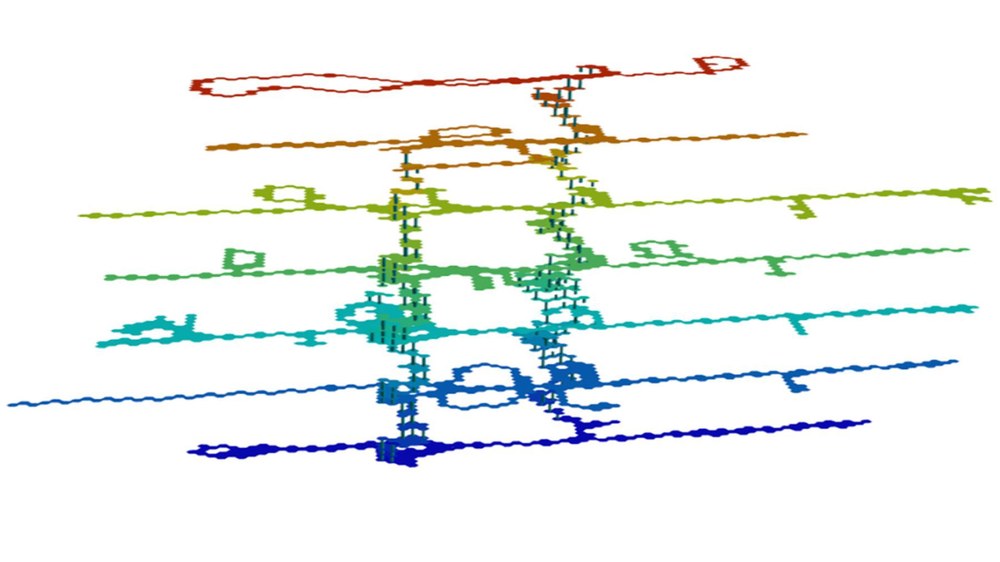
3D-Kartenmaterial unterstützt die Einsatzkoordination
Neben der Lokalisierung von Personen entsteht auch 3D-Kartenmaterial. Die Einsatzleitung kann so zum Beispiel bewerten, ob ein Gebäude vollständig untersucht wurde. Diese Darstellung ist bei einem Test entstanden und zeigt ein DLR-Gebäude.