Positioning in buildings and other environments where GNSS (Global Navigation Satellite System) reception is difficult requires a combination of sensors and other information such as building plans to work accurately.
We are pursuing sensor fusion approaches that combine GNSS, foot mounted inertial sensors, electronic compasses, baro-altimeters, maps, active RFID (Radio frequency identification) tags and Ultra Wideband (UWB) transmitters and receivers. A particularly powerful combination is INS step measurement in conjunction with maps which can converge to the correct position after less than a minute of motion.
We have developed a two-layer sensor fusion architecture that operates with a Kalman filter where possible, and fuses other sensors and maps at a higher-level, lower rate, particle filter. In addition, we developed a similar architecture for simultaneously learning walkable areas of the environment (foot mounted simulatenous localization and mapping - FootSLAM) with an inertial sensor placed at the foot when no map or floor plan is available. More recently, we investigated other sensor locations at the body of the pedestrian like inside the pocket (Pocket Navigation and SLAM) and the combination of multiple sensors placed at the body (Multi-Inertial Navigation).
Indoor Navigation Projects for Professional Use Cases
RESCUER - first RESponder-Centered support toolkit for operation in adverse and infrastruUcture-less EnviRonments
In the project RESCUER a first-responder-centered echnology toolkit will be developed for enhancing the operational capacity and safety of first responders. The toolkit will be especially designed for environmental and infrastructure-wise adverse conditions. It will offer sense augmentation, precise and infrastructure-less self-positioning, cognitive support and multi-sense AR interfaces, and robust ad-hoc intra-team communications for both verbal and data exchanges. DLR's part within RESCUER is to develop a GNSS localization tool for data fusion with inertial and visual navigation tools.
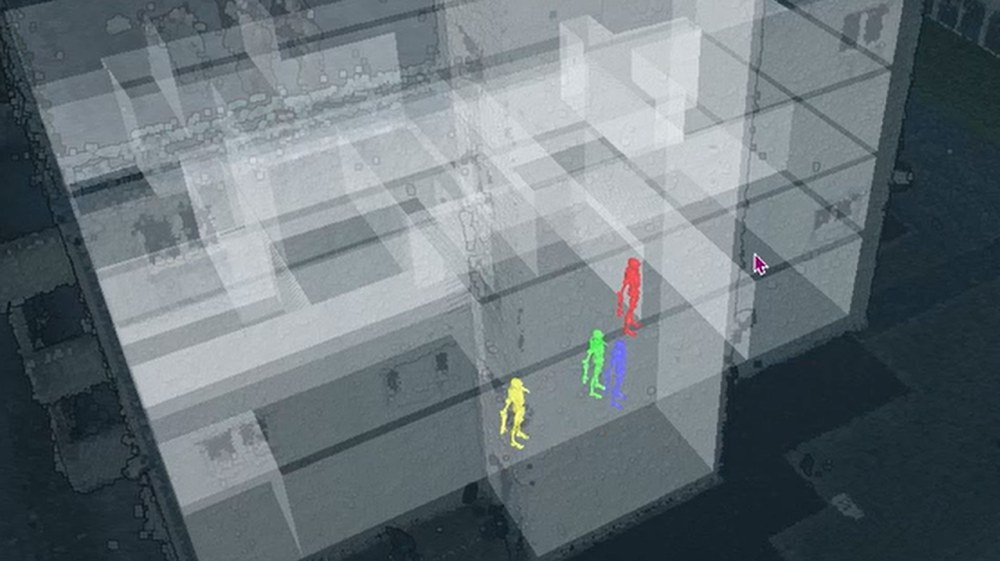
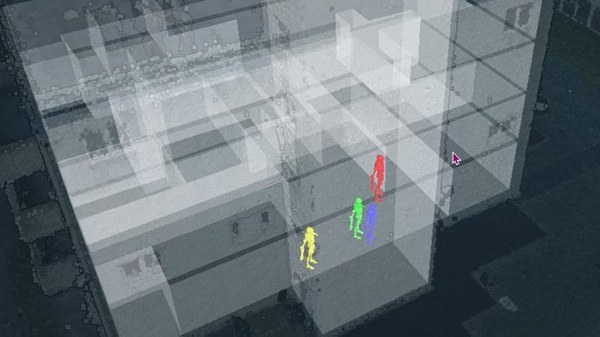
Bei mehreren Tests wurden Einsatzkräfte über ein Tracking-System erkannt. Das Projekt ComInA verknüpft DLR-Technologien zur Ortung und Kartierung. So soll eine effiziente Koordination der Personen umgesetzt werden.
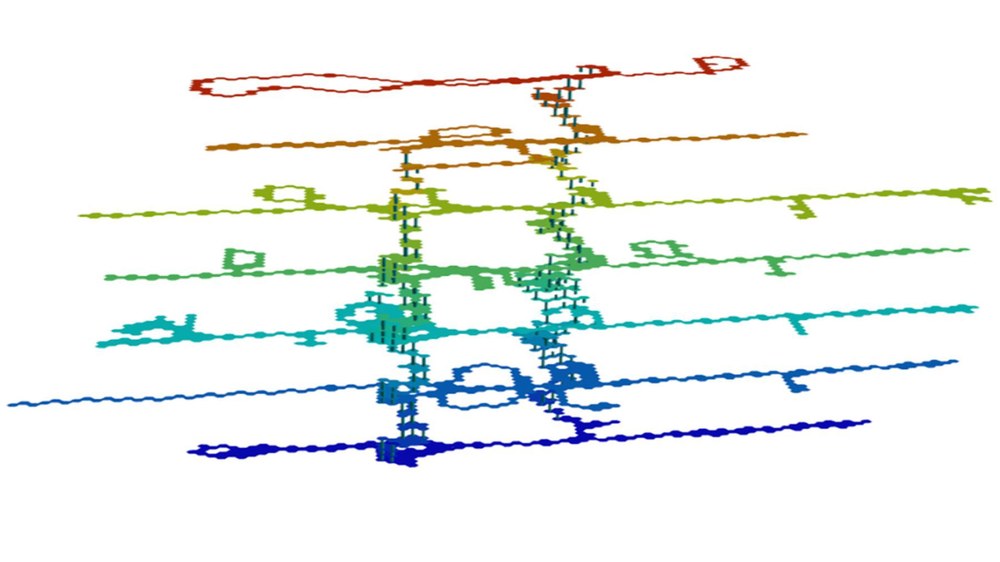
3D-Kartenmaterial unterstützt die Einsatzkoordination
Neben der Lokalisierung von Personen entsteht auch 3D-Kartenmaterial. Die Einsatzleitung kann so zum Beispiel bewerten, ob ein Gebäude vollständig untersucht wurde. Diese Darstellung ist bei einem Test entstanden und zeigt ein DLR-Gebäude.