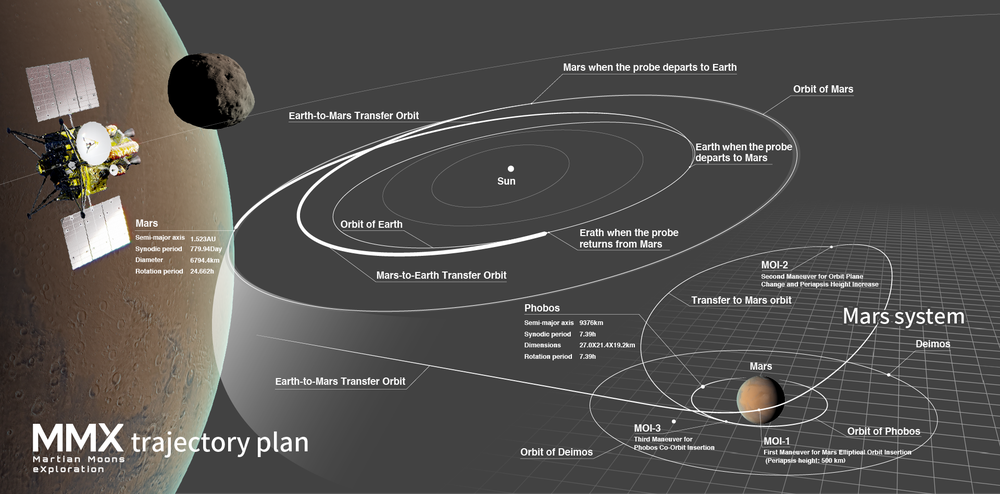
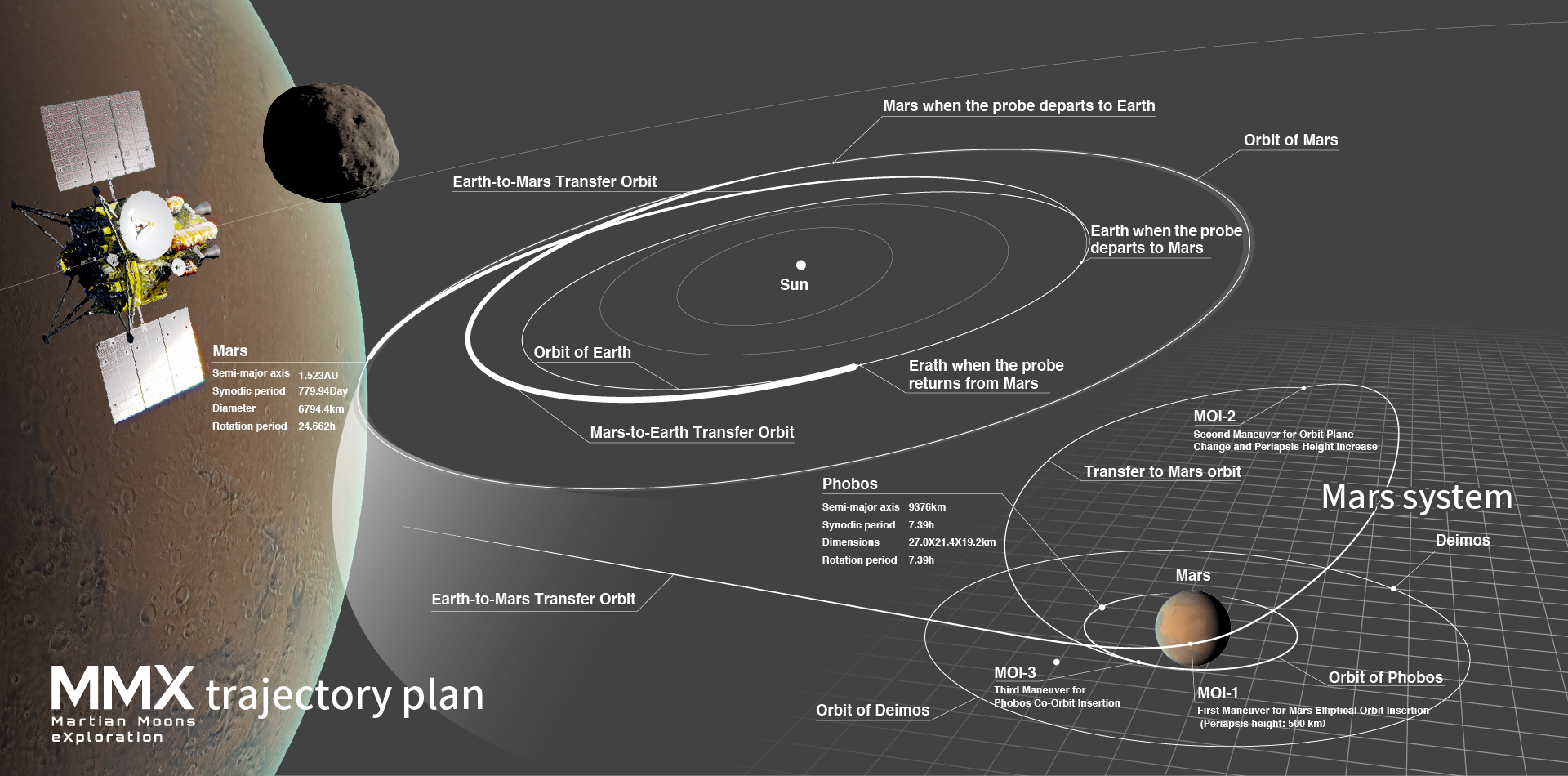
Darstellung des kompletten MMX-Missionsablaufes
Im unteren Teil des Bildes ist der Hinflug der MMX-Raumsonde dargestellt. Wesentliche Meilensteine sind die Manöver zum Einschwenken in die Mars-Umlaufbahn (MOI-1), der Transfer vom Mars- zum Phobos-Orbit (MOI-2) und schließlich das Einschwenken in die Phobos-Umlaufbahn (MOI-3).
Die japanische Mission MMX (Martian Moons eXploration) soll klären, wie die beiden Marsmonde Phobos und Deimos entstanden sind und wie der Prozess der Planetenbildung in unserem Sonnensystem insgesamt abgelaufen ist. Der Fokus der wissenschaftlichen Ziele ist darauf gerichtet, den Entwicklungsprozess der Marssphäre besser zu verstehen. Das DLR liefert zusammen mit CNES mit dem MMX Rover einen wesentlichen Beitrag zur Mission.
Die MMX-Sonde besteht aus: • einem Antriebsmodul mit Treibstofftanks und Raketentriebwerken für den Einschuss in die Marsumlaufbahn • einem Explorationsmodul mit Landebeinen, Probennehmer und Experimenten • einem Rover, gemeinsam entwickelt vom DLR und der französischen Raumfahrtagentur CNES • einem Rückkehr-Modul, in dem neben Experimenten die Sample-Return-Kapsel untergebracht ist.
Basisdaten zur Mission MMX
MMX
Details
Start
2026
Startort
Tanegashima/Japan
Trägerrakete
H-3
Missionsdauer
6 Jahre
Erreichen des Mars-Orbits
2027
Landung des Rovers auf Phobos
2029
Probenentnahme durch Explorermodul
2029
Beginn Rückflug Rückkehrmodul
2030
Landung des Rückkehrmoduls auf der Erde
2031
Basisdaten zum MMX-Rover
MMX-Rover
Details
Abmessungen
231 x 376 x 415 Millimeter
Bruttogewicht
25 Kilogramm
Gewicht der wissenschaftlichen Nutzlast
2,5 Kilogramm
Maße der vier Sonnenkollektoren
415 x 363 Millimeter
Energieproduktion
mindestens 60 Wattstunden pro Phobos-Tag (Dauer: sieben Stunden)
kooperative Projektleitung mit CNES, System Engineering, autonome Navigation, mechatronisches Fahrwerk (Lokomotionsystem) zusammen mit dem Institut für Systemdaynamik und Regelungstechnik
mechatronisches Fahrwerk (Lokomotionsystem) zusammen mit dem Institut für Robotik und Mechatronik (Unterarbeitspakete MMX-Rad und MMX-Software), Simulation der Fortbewegung auf Phobos
Betrieb des Rovers (gemeinsam mit CNES), wissenschaftliche Co-Leitung, Payload Management
Wissenschaftliche Experimente des DLR auf dem Rover:
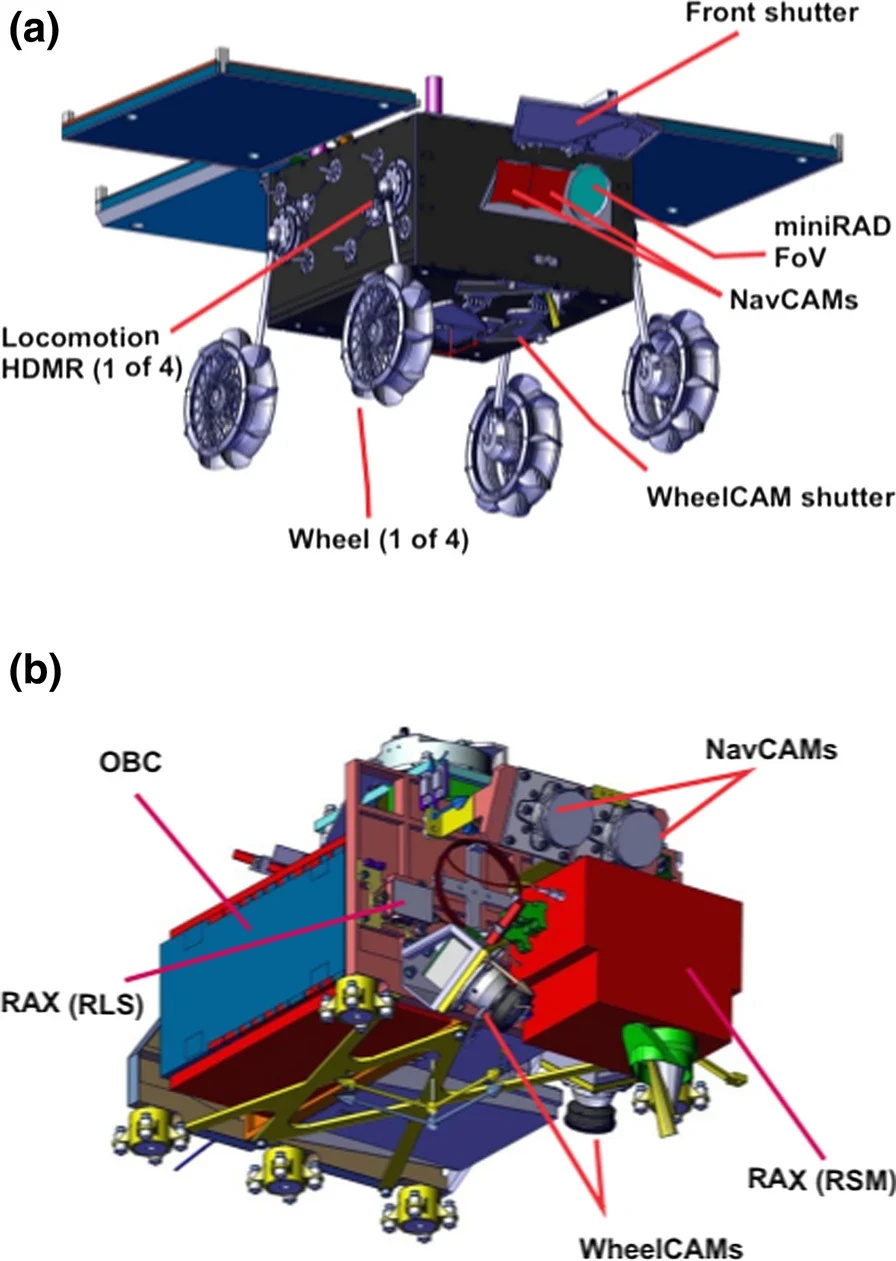
Technische Zeichnung des MMX-Rovers
Oben: Rover in vollständig ausgefahrener Konfiguration mit Positionen des Radiometers MiniRad und der Lokomotionsysteme für jedes Rover-Rad. Unten: Innenansicht mit Position der Instrumente - unter anderem des Spektrometers RAX - und des Bordcomputers (OBC).
Hauptziel ist die Bestimmung der Oberflächentemperatur. Durch Messung der Wärmeabstrahlung im Infrarot können Rückschlüsse auf Materialeigenschaften von Gestein und von losem Material – Korngröße, Porosität und mechanische Festigkeit – an verschiedenen Stellen gezogen werden. Die Messwerte können so direkt mit Proben von Asteroiden und Meteoriten verglichen werden. Auch optische Eigenschaften können mit miniRAD bestimmt werden. Der Strahlungsgrad von Proben erlaubt eine erste mineralogische Charakterisierung der Oberfläche.
Mit RAX bestimmen die Forschenden, aus welchen Materialien die Oberfläche zusammengesetzt ist. Untersucht wird, welche Gesteinsarten in welcher Häufigkeit vorkommen. Dies lässt Rückschlüsse auf die geochemischen, thermischen oder Strahlungsprozesse zu, die zur Bildung der Minerale geführt haben. Die Messungen werden mit Analysen von Marsgestein verglichen. Ergänzend werden Proben, die zur Erde zurückgebracht werden, untersucht. So können die verschiedenen Theorien zur Entstehung von Phobos und Deimos überprüft werden.
Beiträge der CNES zum Rover:
Nach vorne schauende Navigationskameras zur räumlichen Orientierung und Erkundung auf der Oberfläche
Nach unten schauende Kameras zur Untersuchung der mechanischen Bodeneigenschaften (unter anderem zur Vermessung der Spurtiefe)
zentrales Service-Modul inklusive des Onboard-Computers und des Energie- und Kommunikationssystems sowie Solarkollektoren, Zusammenbau und Test des Proto-Flight-Model des Gesamtrovers
Betrieb des Rovers (gemeinsam mit DLR)
2. Explorationsmodul
Bezeichnung
Art des Instrumentes
Ziel
C-SMP (JAXA)
Probenentnehmer (Bohrkern)
Sammlung von Material aus einer Tiefe von über 2 cm
P-SMP (JAXA)
Pneumatischer Probenentnehmer
Sammlung von losem Material an der Oberfläche
LIDAR (JAXA)
Laser-Altimeter
Erfassung/Darstellung der Oberfläche
MSA (JAXA)
Ionen-Massenspektrometer
Nachweis möglicher Eisvorkommen
OROCHI (JAXA)
Multispektrale Weitwinkelkamera
Fotos der Oberfläche, mineralogische Informationen
TENGOO (JAXA)
Teleskopkamera
Hochaufgelöste Fotos der Oberfläche
MEGANE (NASA)
Gamma-/Neutronen-Spektrometer
Bestimmung der Zusammensetzung der Elemente
MiRS (CNES)
Nah-Infrarot-Spektrometer
Bestimmung von Gestein, Wasser und organischem Material
3. Return-Modul
Bezeichnung
Art des Instrumentes
Ziel
CMDM (JAXA)
Staubzähler
misst Staub in der Umgebung
IREM (JAXA)
Strahlungssensor
misst Strahlung in der Umgebung
SHV (JAXA)
Outreach-Kamera
Fotos und Videos
SRC (JAXA)
Sample Return-Kapsel
Transport der Proben zur Erde
MMX – Martian Moons eXploration
MMX ist eine Mission der japanischen Weltraumorganisation JAXA mit Beiträgen von NASA, ESA, der französischen Raumfahrtagentur CNES und dem Deutschen Zentrum für Luft- und Raumfahrt (DLR). CNES und DLR steuern zusammen einen 25 Kilogramm schweren Rover bei. Der deutsch-französische MMX-Rover wird unter gemeinsamer Leitung der beiden Partner entworfen und gebaut. Das DLR übernimmt dabei insbesondere die Entwicklung des Rover-Fahrwerks samt Carbonstruktur sowie des gesamten Aufricht- und Fortbewegungssystems. Zudem steuert das DLR das Verbindungs- und Separationssysten zur Muttersonde bei und stellt ein Raman-Spektrometer sowie ein Radiometer als wissenschaftliche Experimente. Diese werden die Oberflächenzusammensetzung und -beschaffenheit auf Phobos messen. Die CNES leistet wesentliche Beiträge mit Kamerasystemen zur räumlichen Orientierung und Erkundung auf der Oberfläche sowie zur Untersuchung der mechanischen Bodeneigenschaften. Darüber hinaus entwickelt die CNES das zentrale Service-Modul des Rovers inklusive des Onboard-Computers sowie des Energie- und Kommunikationssystems. Nach dem Start der MMX-Mission wird der Rover von Kontrollzentren der CNES in Toulouse (Frankreich) und des DLR in Köln betrieben.
Seitens des DLR sind unter der Leitung des Instituts für Robotik und Mechatronik zudem die Institute für Systemdynamik und Regelungstechnik, für Faserverbundleichtbau und Adaptronik, für Raumfahrtsysteme, für Optische Sensorsysteme, für Planetenforschung, für Softwaretechnologie sowie das Nutzerzentrum für Weltraumexperimente (MUSC) beteiligt.
Die Mission MMX steht in der Tradition einer bereits langjährigen erfolgreichen Kooperation der Partner JAXA, CNES und DLR. Sie knüpft an die Vorgängermission Hayabusa2 an, bei der die JAXA eine Raumsonde zum Asteroiden Ryugu schickte mit dem deutsch-französischen Lander MASCOT an Bord. Am 3. Oktober 2018 landete MASCOT auf Ryugu und sendete spektakuläre Bilder einer faszinierenden zerklüfteten Landschaft aus Geröll und Steinen. Hayabusa2 nahm Proben von Ryugu und brachte diese am 6. Dezember 2020 zurück zur Erde.
Kontakt
Falk Dambowsky
Leitung Media Relations, Presseredaktion
Deutsches Zentrum für Luft- und Raumfahrt (DLR)
Kommunikation
Linder Höhe, 51147 Köln
Tel: +49 2203 601-3959
Dr. Markus Grebenstein
Projektleiter MMX-Rover
Deutsches Zentrum für Luft- und Raumfahrt (DLR)
Institut für Robotik und Mechatronik
Münchener Straße 20, 82234 Oberpfaffenhofen-Weßling

{kind=link}