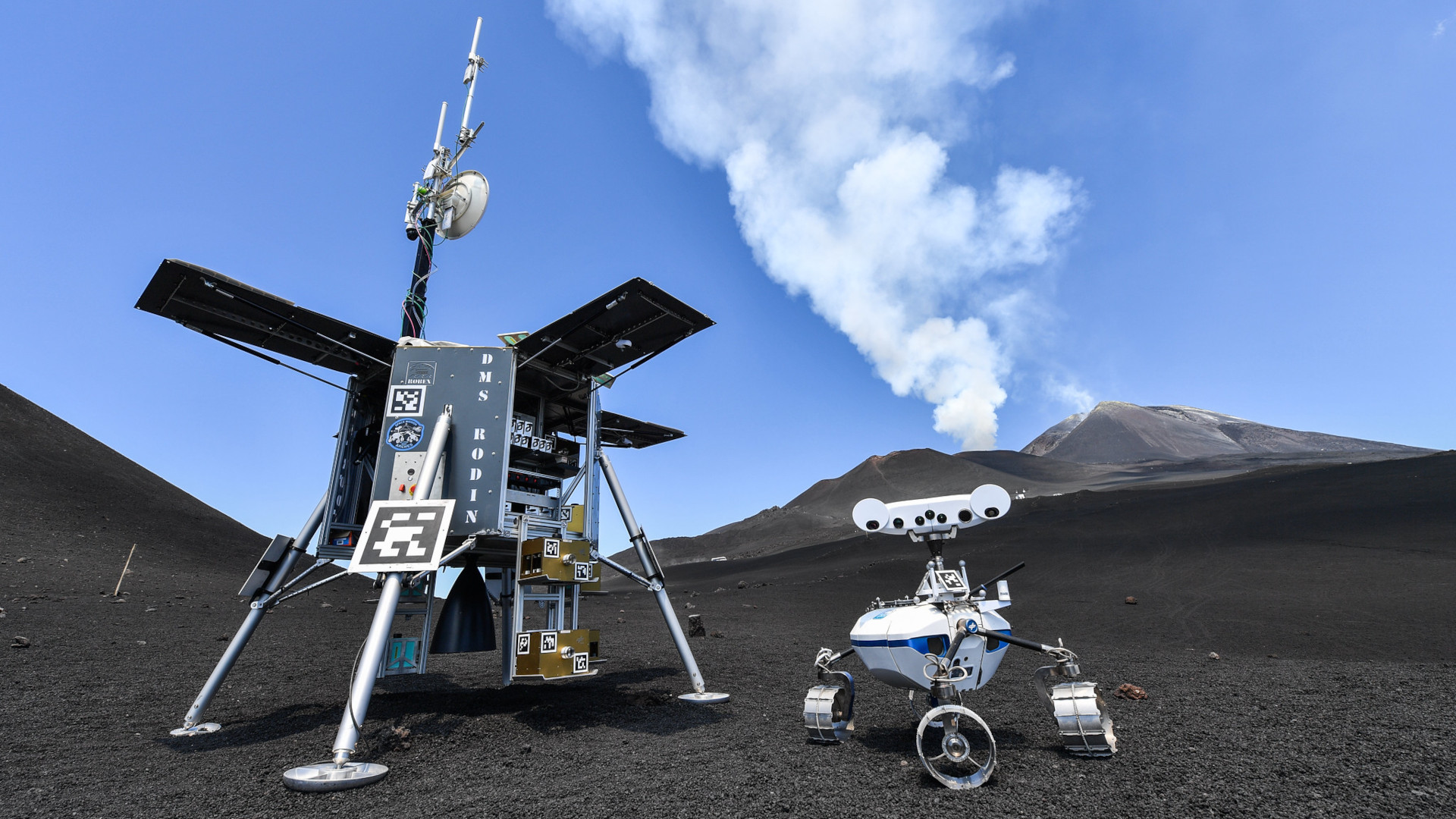
Rover LRU (Lightweight Rover Unit) und Lander Rodin während der „Demomission Weltraum“ auf dem Ätna. Um Missionsszenarien zur robotischen Exploration vor dem Aufbruch zu Mond oder Mars auf der Erde zu erproben, suchen Wissenschaftlerinnen und Wissenschaftler Orte, die den Bedingungen auf einem fremden Himmelskörper möglichst nahekommen. Vom 13. Juni bis 9. Juli 2022 wird der Ätna auf der italienischen Insel Sizilien zum „Quasi-Mond“, denn die Vulkanlandschaft mit ihrer granularen Oberfläche und erstarrten Lavaschichten ähnelt der geologischen Beschaffenheit des Erdtrabanten. ARCHES steht für „Autonomous Robotic Networks to Help Modern Societies“. Forschende nutzen die unwirtliche Umgebung des Ätna als „Mond-Analog“. Mehrere Rover, ein Lander und eine Drohne arbeiten zusammen, erkunden ihre Umgebung und erfüllen Aufgaben.
Der Rover LRU 2 des DLR bei der ARCHES-Weltraumsimulation auf dem Ätna
Der Rover LRU (Lightweight Rover Unit) bei einem ganz ungewöhnlichen Außentest auf dem Ätna. Um Missionsszenarien zur robotischen Exploration vor dem Aufbruch zu Mond oder Mars auf der Erde zu erproben, suchen Wissenschaftlerinnen und Wissenschaftler Orte, die den Bedingungen auf einem fremden Himmelskörper möglichst nahekommen. Vom 13. Juni bis 9. Juli 2022 wird der Ätna auf der italienischen Insel Sizilien zum „Quasi-Mond“, denn die Vulkanlandschaft mit ihrer granularen Oberfläche und erstarrten Lavaschichten ähnelt der geologischen Beschaffenheit des Erdtrabanten. ARCHES steht für „Autonomous Robotic Networks to Help Modern Societies“. Forschende nutzen die unwirtliche Umgebung des Ätna als „Mond-Analog“. Mehrere Rover, ein Lander und eine Drohne arbeiten zusammen, erkunden ihre Umgebung und erfüllen Aufgaben.
Die Erforschung des Weltraumes gehört zu den komplexesten wissenschaftlichen Aufgaben. Fundamentale Fragen sollen geklärt werden, zum Beispiel, wie das Universum entstanden oder ob Leben außerhalb unserer Erde möglich ist. Mit astronautischen Missionen ist die Menschheit bis zum Mond gelangt und hat sich ehrgeizige Ziele gesetzt, die darüber hinaus reichen. Unser Nachbarplanet Mars rückt immer mehr in den Fokus einer zukünftigen Crew-Mission. Doch die Risiken einer interplanetaren Reise sind hoch, die Umgebung ist lebensfeindlich, die zu überwindenden Distanzen riesig. Die Sicherheit von Astronautinnen und Astronauten steht an erster Stelle.
Aus diesem Grund entsenden Raumfahrtnationen autonome Roboter zur Erkundung von Planeten, Monden, Asteroiden und Kometen. Diese müssen so konstruiert sein, dass sie sich in unbekannten und rauhen Umgebungen eigenständig orientieren, bewegen und Aufgaben erfüllen können. Das ist schon allein deshalb notwendig, weil aufgrund der langen Signallaufzeit nur eingeschränkte Steuerungsmöglichkeiten von der Erde aus bestehen. Doch auch astronautische Missionen können von Robotern unterstützt werden, etwa in dem sie vorausgeschickt werden und am Ziel eine Basis mit der für Menschen notwendigen Infrastruktur errichten. Später können sie die Crew bei ihren Arbeiten vor Ort unterstützen.
Der Ätna als Mondanalog
Um solche Missionsszenarien zu erproben, suchen Wissenschaftlerinnen und Wisenschaftler Orte auf der Erde aus, die den Bedingungen auf einem fremden Himmeskörper nahe kommen. Der Vulkan Ätna in Italien dient im Projekt ARCHES als „Ersatz“ für unseren Mond. Die dortige Landschaft mit ihrer körnigen Oberfläche, oft auftretenden Erdbeben und erstarrten Lavaschichten unterschiedlicher Ausdehnung ähnelt der geologischen Beschaffenheit des Erdtrabanten. Auf diese Weise können kritische Kernkomponenten einer realen lunaren Expedition getestet und validiert werden. Dabei ist der Schutz des UNESCO-Weltnaturerbes Ätna von höchster Priorität, weshalb die lokalen Umweltschutzbehörden von Anfang an in die Planung dieser Analogmission eingebunden sind.
Als einer der aktivsten Vulkane Europas hat sich der Ätna hat als Testfeld für die robotische Erkundung anderer Himmelskörper bereits bewährt: 2017 fand dort in Helmhotz-Regie die Analogmission ROBEX (Robotische Exploration unter Extrembedingungen) statt, ebenfalls mit Beteiligung der Robotik-Fachleute des Deutschen Zentrums für Luft- und Raumfahrt (DLR). Eine Premiere, die zum Ziel hatte, kombinierte robotische Systeme mit innovativen Technologien zum Energieaustausch, Datentransfer und möglichst viel Autonomie zu erproben. Der Nachweis, dass diese Technologien auch für zukünftige Explorationsmissionen eingesetzt werden können, wurde grundsätzlich erbracht. ARCHES baut auf den Erkenntnissen der ROBEX-Demonstration auf und soll diese verfeinern.
Das ARCHES-Szenario
Das ARCHES-Kontrollzentrum befindet sich in der Stadt Catania, die an den Naurpark Ätna angrenzt. Von hier aus werden die autonom arbeitenden Roboter überwacht und die Kommunikation mit den Wissenschaftlern vor Ort, die bei Bedarf jederzeit eingreifen können, hergestellt. Eine stationäre robotische Komponente – der Lander – stellt die Energieversorgung der mobilen Einheiten und ihren Datenaustausch sicher. Eine Drohne kartiert die Umgebung aus der Luft; dabei wird sie von mehreren Rovern am Boden unterstützt. Auf Basis der gemeinsam gewonnenen Daten entscheiden die Forschenden im Kontrollzentrum, welche Areale am besten geeignet erscheinen, um dort von den Robotern autonom Messinstrumente platzieren, Bodenproben nehmen und geologische Untersuchungen durchzuführen zu lassen. Für eine spätere reale astronautische Mission ist unter anderem interessant, ob Materialien für den Bau einer Wohnumgebung für Menschen (Habitat) – Wasser und „formbares“ Gestein, geeignet für den 3D-Druck – vor Ort vorhanden und nutzbar sind. So können das Transportgewicht und die Kosten einer solchen Expedition in Grenzen gehalten werden.
Im Projekt ARCHES arbeiten das Deutsche Zentrum für Luft- und Raumfahrt (DLR) und das Karlsruher Institut für Technologie (KIT) zusammen an der Weltraum-Analogmission. Die Europäische Weltraumorganisation (ESA) ist hier Partner. An der Tiefsee-Analogmission in Regie der Helmholtz-Zentren für Polar- und Meeresforschung (Alfred-Wegener-Institut , AWI) sowie für Ozeanforschung (GEOMAR) ist das DLR ebenfalls beteiligt. Die Erkenntnisse werden unter allen Partnern ausgetauscht und sollen unabhängig vom jeweiligen Einsatzszenario nutzbar gemacht werden. Dies gilt sowohl für die Hardware als auch für die gemeinsame Analyse und Interpretation von Daten durch die Roboter des Netzwerks sowie deren Interaktion mit dem Menschen.
Kontakt
Michael Müller
Redakteur
Deutsches Zentrum für Luft- und Raumfahrt (DLR)
Kommunikation
Linder Höhe, 51147 Köln
Tel: +49 2203 601-3717
Lioba Suchenwirth
Institutsbeauftragte für Presse- und Öffentlichkeitsarbeit
Deutsches Zentrum für Luft- und Raumfahrt (DLR)
Institut für Robotik und Mechatronik
Münchener Straße 20, 82234 Oberpfaffenhofen-Weßling
Dr. Armin Wedler
Deutsches Zentrum für Luft- und Raumfahrt (DLR)
Institut für Robotik und Mechatronik
Münchener Straße 20, 82234 Oberpfaffenhofen-Weßling




{kind=link}
{kind=link}
{kind=link}