27. Februar 2025 | Neuer Ansatz erleichtert Zusammenarbeit von Robotern und Menschen
Die Kunst der Nachgiebigkeit in der Robotik
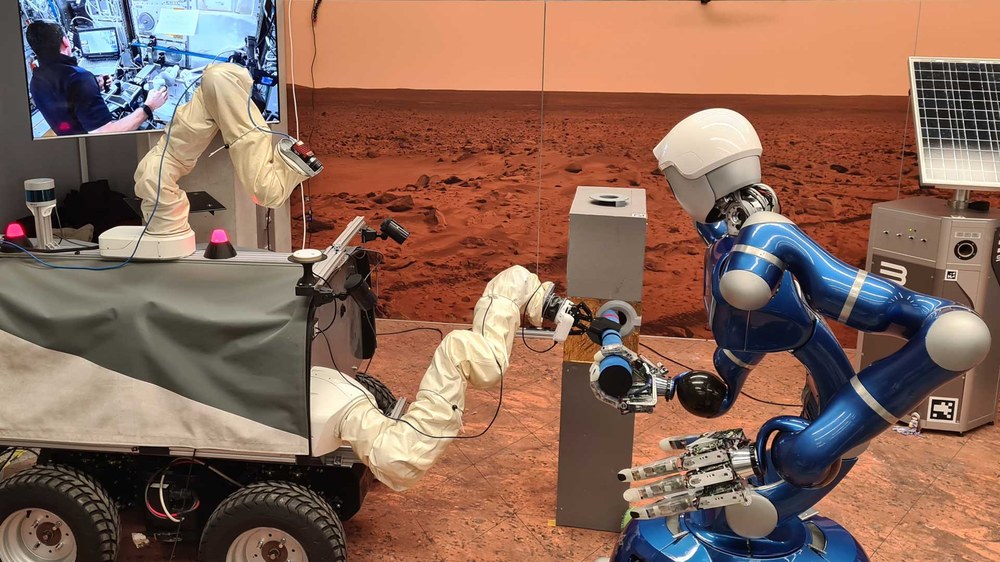
Ferngesteuert von der ISS: DLR-Roboter Rollin’ Justin und ESA-Rover Interact
Der autonome humanoide DLR-Roboter Rollin‘ Justin (rechts) und der Rover Interact der ESA (links) werden von der Internationalen Raumstation ISS aus gesteuert. Sie kooperieren beim Handling eines Werkzeugs.
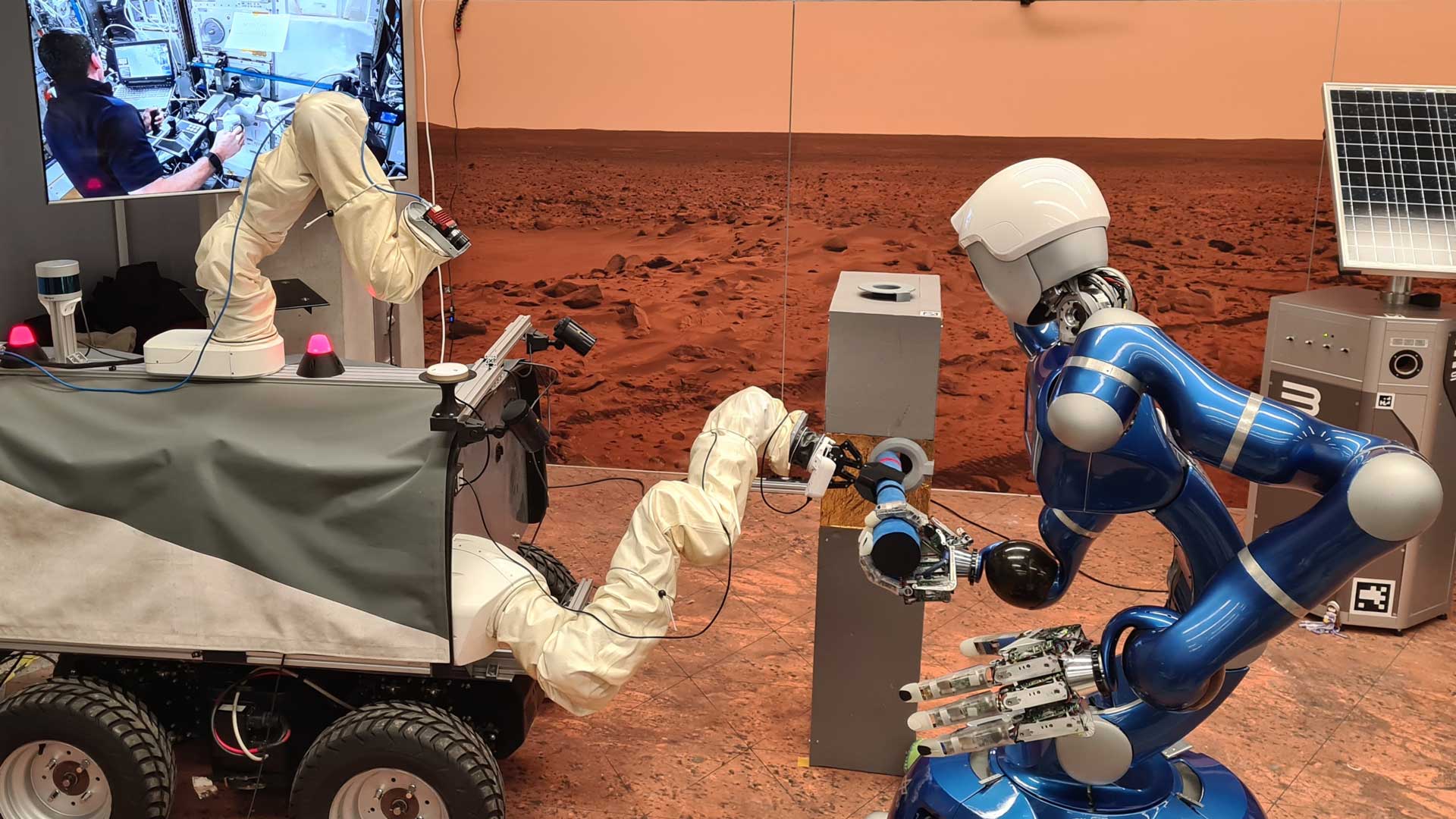
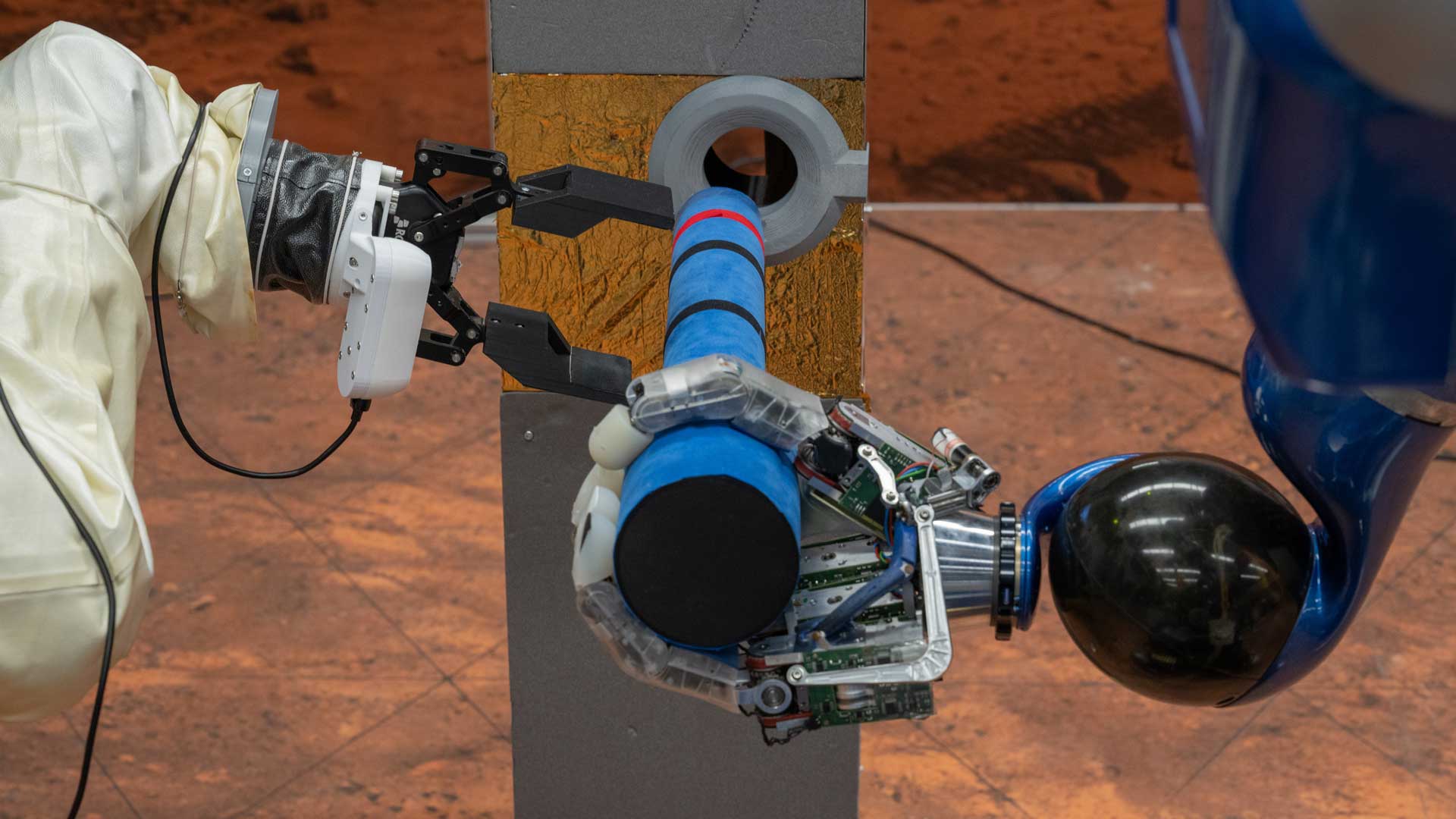
Zwei robotische Hände kooperieren beim gemeinsamen Handling eines Werkzeugs
Während der Arm des humanoiden DLR-Roboters (rechts) ein Objekt selbstständig trägt, steuert der Astronaut von der ISS aus den Arm des ESA-Rovers Interact (links). Der Astronaut führt das Objekt an die Zielposition. Durch den neuen Ansatz ist es möglich, dass der Humanoide die Rotation des Objekts beibehält, sich jedoch in den Translationen besonders nachhaltig nachgiebig verhält.
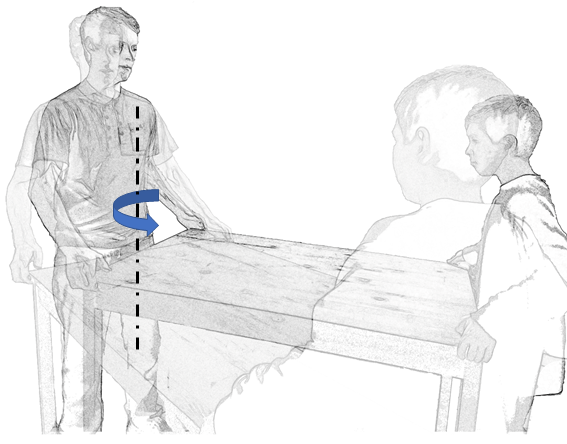
Visualisierung einer für Roboter komplexen menschlichen Kooperation
Die Visualisierung einer menschlichen Kooperation zeigt, wie sich die Person links an die Bewegung der rechten Person durch eine Rotationsbewegung anpasst. Die linke Person spürt eine Kraft und eine Bewegung und reagiert dabei nachgiebig, ohne an die Ausgangsposition zurückzudrängen. Dieses Interaktionsprinzip ist die Grundlage für die publizierte nachgiebige Roboterregelung.
DLR-Konzept lässt kollaborative Roboter nachgiebig ausweichen, ohne wie durch eine mechanische Feder in den Ausgangszustand zurückzudrängen.
Nachgiebigkeit von Maschinen bezeichnet ihre Fähigkeit, nicht starr im Raum zu stehen, sondern ihre Position flexibel an die Gegebenheiten ihrer Umgebung anzupassen.
Fortschritte im Hinblick auf Nachgiebigkeit und Anpassungsfähigkeit erhöhen die Sicherheit und Effektivität von Robotern und beschleunigen die Integration in den Alltag.
Schwerpunkte: Raumfahrt, Robotik in Weltraumforschung und Pflege
Der Einsatz von Robotern in menschlichen Umgebungen nimmt rasant zu. Umso mehr rückt die Nachgiebigkeit dieser Maschinen als ein entscheidendes Sicherheitsmerkmal in den Fokus. Diese Fähigkeit, sich flexibel an die Gegebenheiten anzupassen, macht den Unterschied zwischen einem reibungslosen Einsatz und möglichen Gefahren wie Zusammenstößen mit Menschen in der unmittelbaren Umgebung. In der Welt der sogenannten Cobots – kollaborativen Robotern, die in enger Zusammenarbeit mit Menschen agieren – hat sich das Deutsche Zentrum für Luft- und Raumfahrt (DLR) als Pionier etabliert. Das bisherige Ziel dieser Entwicklung: Roboter sollen so agieren, dass sie wie eine mechanische Feder auf eine gewünschte Position hinbewegt werden. Allerdings bewegen sich Federn stets in ihre Ursprungsposition zurück. Ein fortschrittlicheres Konzept stellten DLR-Forschende nun in der Fachzeitschrift Science Robotics vor. Ihr Ansatz lässt Roboter nachgiebig ausweichen, ohne sich wie eine Feder in den Ausgangszustand zurückzubewegen; ein Verhalten, das dem Menschen ähnelt, wenn gemeinsame praktische Aufgaben erledigt werden sollen – ein Mensch übernimmt das Kommando, der andere bleibt flexibel und nachgiebig.
Dr. Michael Panzirsch, Wissenschaftler am DLR-Institut für Robotik und Mechatronik, erklärt: „Der neue elasto-plastische Ansatz erleichtert die Kooperation zwischen Mensch und Roboter erheblich, da der Roboter nun klar unterscheiden kann, ob seine Bewegung aus einem eigenen Befehl resultiert oder durch eine sich bewegende Umgebung beeinflusst wurde. Der Roboter soll nur auf Einwirken einer solchen Umgebung plastisch reagieren, das heißt, ausweichen und an der Stelle anhalten.“
Zusätzlich bietet der innovative Regler generell die Möglichkeit, die Interaktion mit Objekten zu vereinfachen, die eine komplexe Bewegung aufweisen. Beispielsweise lässt sich eine Tür nur durch die Drehung um eine Achse öffnen. Der Roboter folgt der korrekten Bewegungsrichtung, also der Drehung um die Achse durch den Regler quasi automatisch und ohne ein zusätzliches Modell der Tür zu benötigen. Dies ist vergleichbar mit einem Menschen, der mit geschlossenen Augen eine Tür öffnet, nur am Türgriff zieht und sich automatisch plastisch nachgiebig an die Kreisbahn anpasst.
Anwendung in der Weltraumforschung und Pflege
Schon seit Jahrzehnten forscht das DLR-Institut für Robotik und Mechatronik an feinfühligen Robotern. Es hat den ersten Roboterarm entwickelt, der sich durch eine bemerkenswerte Nachgiebigkeit von klassischen, starren Industrierobotern abhebt. Bereits im Januar 2024 wurde der elasto-plastische Regelungsansatz in einer Weltraummission erfolgreich getestet. Im Rahmen der Projektreihe Surface Avatar wird die Teleoperation mehrerer roboterbasierter Avatare auf einer Planetenoberfläche untersucht. Hierbei steht die erfolgreiche Zusammenarbeit eines heterogenen Roboterteams im Mittelpunkt, das in der Lage sein soll, kollaborative Aufgaben auszuführen. „Erstmals ermöglichte unser Regler eine durch einen Astronauten auf der Internationalen Raumstation ISS gesteuerte Kooperation zwischen einem Rover des Human Robot Interaction Laboratory der europäischen Raumfahrtagentur ESA und einem humanoiden DLR-Roboter“, erklärt Dr. Neal Y. Lii, wissenschaftlicher Leiter des Surface-Avatar-Programms.
Doch nicht nur im Weltall zeigt sich die Vielseitigkeit der Technologie. Im Pflegebereich erweist sich der elasto-plastische Regler als ein wertvolles Hilfsmittel. In der Projektreihe SMiLE (Servicerobotik für Menschen in Lebenssituationen mit Einschränkungen) entwickeln DLR-Forschende wie Jörn Vogel Konzepte für Assistenzsysteme, die Menschen mit körperlichen Einschränkungen sowie pflegebedürftigen Personen eine effektive Unterstützung im Alltag bieten sollen. Der elasto-plastische Regler erleichtert nicht nur die Zusammenarbeit zwischen Mensch und Roboter, sondern ermöglicht es dem Roboter auch, automatisch in eine untergeordnete Rolle zu schlüpfen, ohne zusätzliche, komplexe Sensorik zu benötigen.
Die Fortschritte in der Robotik, insbesondere im Hinblick auf Nachgiebigkeit und Anpassungsfähigkeit, beschleunigen nicht nur die Integration von Robotern in den Alltag, sondern erhöhen auch deren Sicherheit und Effektivität. In einer Zukunft, in der Mensch und Maschine immer enger zusammenarbeiten, wird es entscheidend sein, dass diese Maschinen nicht nur reagieren, sondern auch verstehen – und das auf eine Weise, die den menschlichen Bedürfnissen und Eigenheiten gerecht wird und sich an den menschlichen Fähigkeiten ein Vorbild nimmt.


{kind=link}
{kind=link}