Kontur-2: Die Fernbedienung aus dem Weltall


{kind=link}
{kind=link}

{kind=link}
Es ist ein kompaktes, überschaubares Gepäckstück, das die neue Besatzung der Internationalen Raumstation ISS - Kosmonaut Oleg Kononenko, Astronaut Kimiya Yui und Astronaut Kjell Lindgren – bei ihrem Start heute am 22. Juli 2015 um 23.02 Uhr mitteleuropäischer Zeit mit an Bord ihrer Sojus-Rakete haben: Der Kontur-2-Joystick des Deutschen Zentrums für Luft- und Raumfahrt (DLR) fliegt mit zu seinem neuen Bestimmungsort. Von dort soll Oleg Kononenko dann mit ihm arbeiten - und im August den Roboter ROKVISS im Labor des DLR-Instituts für Robotik und Mechatronik ferngesteuert bewegen. Das Besondere dabei: Der Kosmonaut wird nicht nur ein Kamerabild von dem Roboter am Boden übermittelt bekommen, sondern wird währenddessen genau spüren, was der Roboter in über 400 Kilometern Entfernung auf dem Erdboden berührt. Kontur-2 meldet ihm nämlich zurück, ob und wie stark er beispielsweise mit einem Objekt kollidiert. Das Telepräsenz-Experiment soll bei seinem Bediener den Eindruck vermitteln, er sei vor Ort im Labor - und nicht in einer Umlaufbahn um die Erde.
Dafür werden die Kontaktkräfte am Roboter mit speziellen Sensoren erfasst und dem Kosmonauten durch die Motoren des kraftreflektierenden Joysticks wiedergegeben. So könnten auch feinmotorische Aufgaben sicher durchgeführt werden: Die kraftreflektierende Technologie soll es zukünftig Astronauten ermöglichen, Roboter im Orbit oder auf Oberflächen von Himmelskörpern – beispielsweise auf Mond oder Mars - für Montage- und Reparaturaufgaben zu steuern, ohne die Raumstation zu verlassen. Schließlich wird der Mensch auch noch geraume Zeit bei komplexen Aufgaben wie dem Aufbau von Habitaten unersätzlich bleiben, weil er auch auf unvorhergesehene Situationen reagieren kann. Steuert er per Fernbedienung - also telepräsent - einen Roboter, kann er aber seine menschlichen Fähigkeiten einbringen und erhält dabei Informationen über Kollisionen und Kontakte des Roboters.
Sensomotorik in Schwerelosigkeit
Diese Fernbedienung vom All hin zur Erde ist allerdings anspruchsvoll, denn die Internationale Raumstation fliegt mit etwa 28.000 Kilometern in der Stunde über die DLR-Empfangsantenne hinweg, die Zeitverzögerung bei der Datenübertragung beträgt teilweise bis zu 100 Millisekunden, und bei der Verbindung zwischen ISS und Erde können auch Datenpakete verloren gehen. Dennoch soll Kosmonaut Oleg Kononenko an seinem fliegenden Arbeitsplatz eine möglichst realistische Rückmeldung über den Joystick erhalten. "Wir wissen, dass die Sensomotorik der Astronauten in der Schwerelosigkeit leidet und wollen nun herausfinden, wie groß genau diese Einbußen sind", erläutert Dr. Bernhard Weber vom DLR-Institut für Robotik und Mechatronik. Das Zusammenspiel von Körperbewegung und Wahrnehmung mit allen Sinnen muss schließlich funktionieren, wenn Astronauten beispielsweise präzise Docking-Manöver oder Arbeiten mit dem Roboterarm der ISS ausführen. Noch können die Wissenschaftler nicht sagen, warum die Astronauten in ihrer Sensomotorik eingeschränkt sind: "Die Körperwahrnehmung könnte im All anders ablaufen oder das Gleichgewichtsorgan gestört sein - zurzeit gibt es noch unterschiedliche Erklärungsansätze."
Erfahrung mit der Verbindung zwischen Erde und All
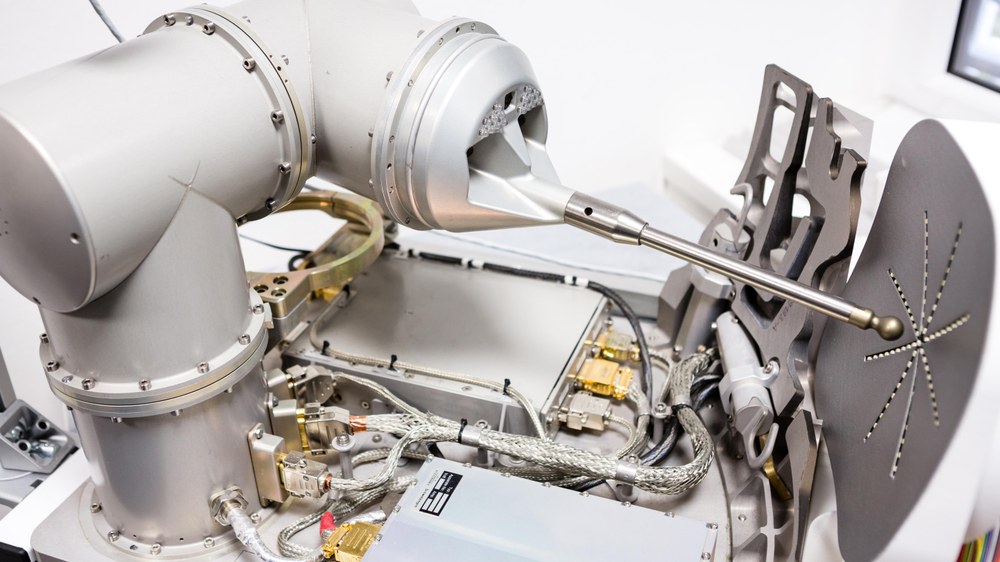
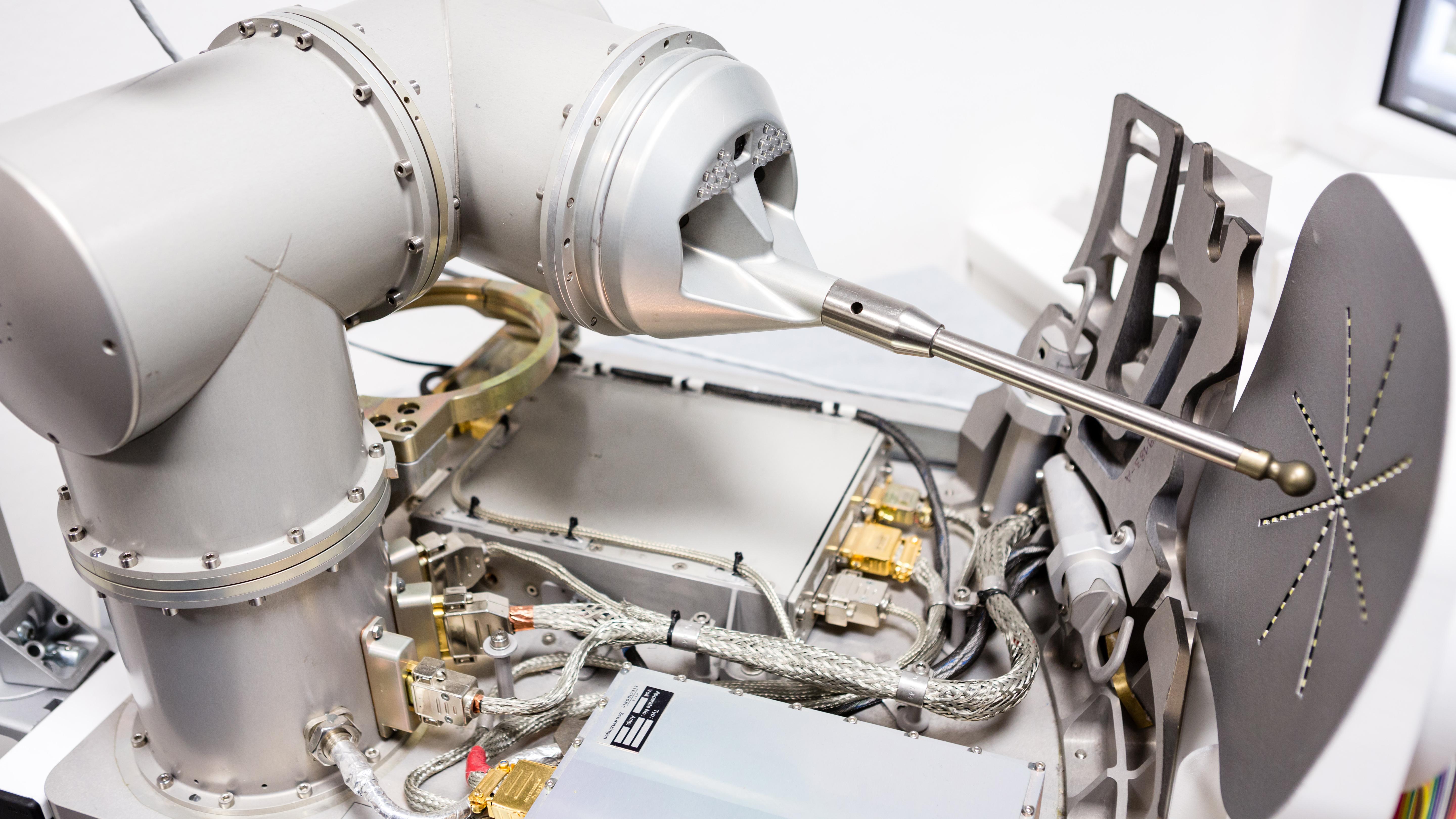
Zum Einsatz bei diesem Experiment kommt ein Veteran der Weltraumrobotik: Roboterarm ROKVISS (Robotik-Komponenten-Verifikation auf der ISS) war ab 2005 für fünf Jahre an der Außenseite der Internationalen Raumstation installiert und wurde vom DLR in Oberpfaffenhofen aus gesteuert. Der weltraumerfahrene Roboterarm stand nach seiner Rückkehr aus dem All für das Kosmonautentraining beim Projektpartner ZNII RTK (Russian State Scientific Center for Robotics and Technical Cybernetics) in St. Petersburg, das baugleiche Qualifikationsmodell von ROKVISS wartet im DLR darauf, dass es mit Befehlen aus dem All bewegt wird. Auf der ISS werden der Computer und Antennenanlage von ROKVISS wieder für die nächste Experiment-Generation eingesetzt und wurden mit neu entwickelter Software auf das Kontur-2-Experiment vorbereitet. "Das DLR-Institut für Robotik und Mechatronik hat bereits seit den 90er Jahren Erfahrung mit dieser Art von Experimenten", betont Institutsleiter Prof. Alin Albu-Schäffer. So fingen die DLR-Wissenschaftler 1993 mit ihrem Roboterarm ROTEX ferngesteuert einen schwebenden Würfel im Space Shuttle ein - und steuerten so erstmals vom Boden per Fernbedienung einen Roboter im All. "Mit ROKVISS waren wir 2005 auch die ersten, die einen Roboter auf der ISS vom Boden aus mit Kraftrückkopplung gesteuert haben. Nun stellen wir diese Technologie den Kosmonauten zur Verfügung."
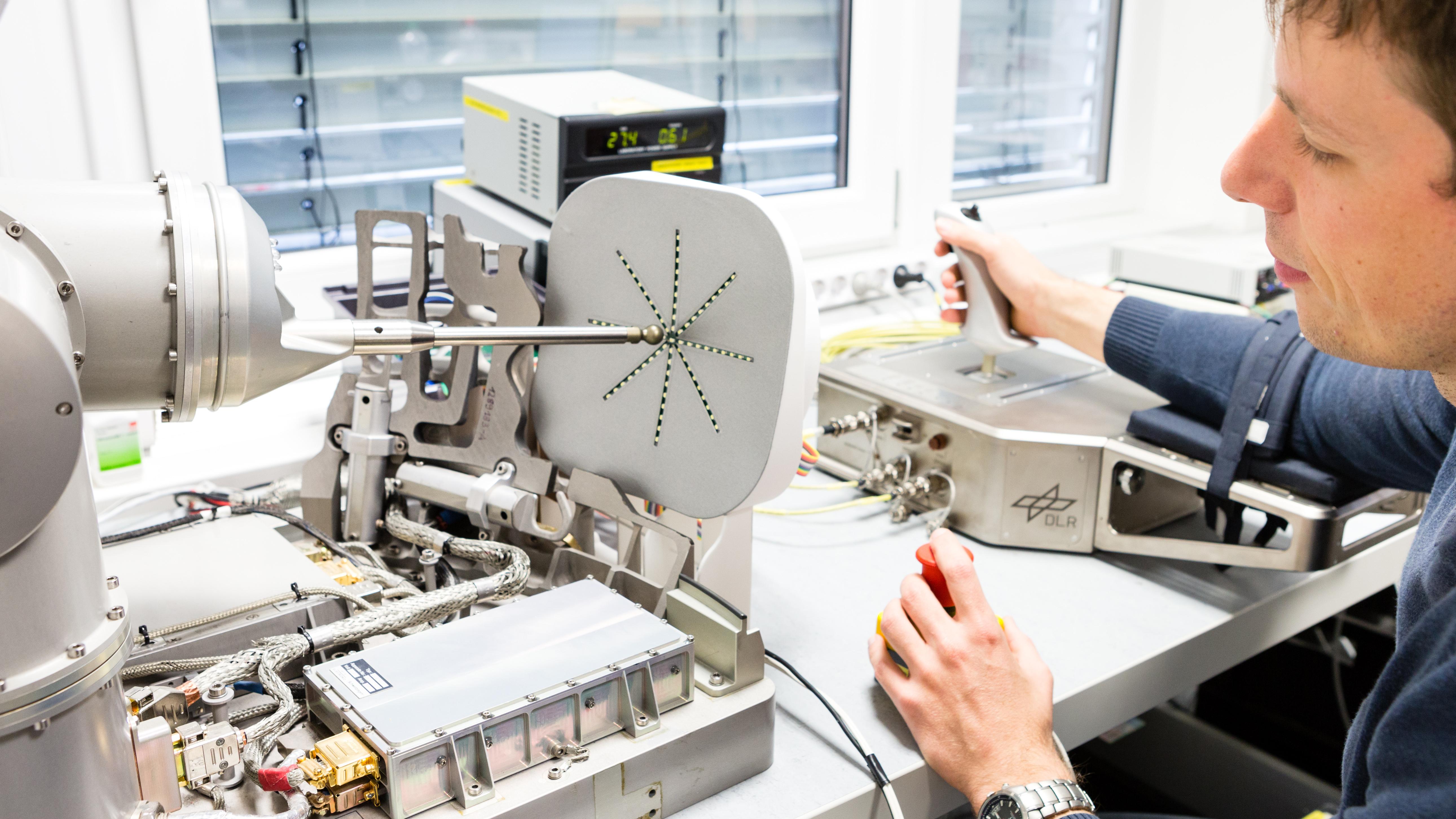
Federzug aus 400 Kilometer Entfernung
Für Kosmonaut Oleg Kononenko haben die DLR-Wissenschaftler ein ganzes Aufgaben-Paket zusammengestellt, das er Mitte August in der Schwerelosigkeit mit dem Kontur-2-Joystick absolvieren soll. Zunächst soll er beispielsweise ein durch LED-Leuchten vorgegebenes Ziel mit dem irdischen Roboterarm ansteuern und möglichst zügig erreichen. Eine weitere Aufgabe wird sein, mit dem Metallfinger des Roboters eine Kontur abzufahren und dabei kontinuierlich in leichtem Kontakt zu bleiben. "Daran können wir feststellen, wie gut der Kosmonaut im All auf seinem Joystick eine Rückmeldung über die Kontaktkräfte auf der Erde erhält", erläutert DLR-Wissenschaftler Bernhard Weber. Außerdem soll der Kosmonaut einen an ROKVISS angebrachten Federzug mit dem Joystick ansteuern und mit einer vorgegebenen Kraft daran ziehen. Im Chat mit Oleg Kononenko können die Wissenschaftler des DLR dem Kosmonauten dann weitere Anweisungen geben, die er mit dem Kontur-2-Joystick ausführen soll.
Ein Joystick mit besonderen Anforderungen
Die Fernbedienung aus dem All ist aus technischer Sicht alles andere als einfach: Taucht die ISS am Horizont auf, ist die Zeitverzögerung länger als in dem Moment, in dem sie sich direkt über der DLR-Empfangsantenne in Weilheim befindet. Die Bandbreite der Funkverbindung ist zudem limitiert – "aber eigentlich benötigen wir eine hohe Taktung für unsere großen Datenmengen, um dem Kosmonauten eine realistische Kräfte-Rückmeldung geben zu können", betont Dr. Jordi Artigas, der für die Regelungstechnik im Projekt zuständig ist und Lösungen für eben diese schwierigen Rahmenbedingungen finden musste.
Auch der Joystick für ein solches Experiment kann nicht aus dem Ladenregal gekauft werden: "Es gibt etwa 30 bis 40 Tests, die unsere Hardware bestehen musste, bevor sie überhaupt an Bord der Sojus-Rakete durfte", sagt Cornelia Riecke vom DLR-Institut für Robotik und Mechatronik. "Elektromagnetische Verträglichkeit, robust genug für die Vibrationen des Starts, ohne brennbare Materialien oder Stoffe, die ausgasen könnten, und so weiter…" Die Anforderungen für die Weltraumtauglichkeit sind hoch, der Stapel der erforderlichen Dokumentationen ebenfalls.
Zwei Zusatzelemente braucht der Kontur-2-Joystick zudem, damit die Kosmonauten mit ihm den Roboterarm am Boden steuern können: Einen Haltegriff und eine Fixierung. "Sonst würden die Kosmonauten beim Bedienen des Joysticks in der Schwerelosigkeit vielleicht unabsichtlich wegdriften", sagt DLR-Wissenschaftler Bernhard Weber. "Und diese Bewegung würde sich über den Joystick auch auf unseren Roboter ROKVISS auswirken."