KONTUR-2 – remote control in space


{kind=link}
{kind=link}

{kind=link}
The new crew on their way to the International Space Station (ISS) – cosmonaut Oleg Kononenko and astronauts Kimiya Yui and Kjell Lindgren – will be carrying a compact piece of luggage on board the Soyuz spacecraft. The KONTUR-2 joystick developed by the German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt; DLR) is setting off to its new destination. Upon arrival, Kononenko will be responsible for working with the device and in August will operate the ROKVISS (Robotic Components Verification on the ISS) robot installed at the DLR Robotics and Mechatronics Center using the remote control. What makes this special? The cosmonaut will not only see a camera image of the robot sent up from the ground, he will also, at a distance of over 400 kilometres, feel precisely what the robot back on Earth touches. This is enabled by a mechanism in KONTUR-2 that detects exactly how strongly it touches another object, as well as other metrics. The telepresence experiment is designed to give its operator the impression of being on-site at the laboratory – and not in orbit around Earth.
To enable this, special sensors register the force generated when the robot makes contact with objects, passing this information on to the cosmonaut through actuators fitted to the force-feedback joystick. This means that even tasks requiring fine motor skills can be performed safely; in future, the force-feedback technology will allow astronauts situated within a base station to control robots in orbit or on the surface of celestial bodies – for instance the Moon or Mars – as they perform assembly or repair tasks. This is particularly helpful, as complex duties such as building habitats will, for some time, continue to require human input to respond adaptively to unforeseen situations. When controlling a robot remotely – which is what telepresence entails – the operator can contribute his or her personal skills while receiving information on collisions and contacts experienced by the robot.
Sensorimotor skills in a microgravity environment
Sending remote control signals from space to Earth is demanding because the ISS orbits over the DLR receiving antenna at a speed of approximately 28,000 kilometres per hour. In addition, the time delay for data transfer can be up to 100 milliseconds and data packets can be lost in transit between the ISS and Earth. Despite all this, the response that cosmonaut Kononenko receives via the joystick while it is installed at his flying workstation should be as realistic as possible. “We are aware that the sensorimotor skills of astronauts suffer in microgravity, and will be using this experiment to find out precisely how severe the effects are,” explains Bernhard Weber from the DLR Robotics and Mechatronics Center. After all, it is imperative that the interaction between the operator’s physical movements and overall sensory perception works smoothly when astronauts perform precise docking manoeuvres or work with the ISS robotic arms. Currently, scientists do not fully understand why astronauts experience a reduction in sensorimotor skills: “It is conceivable that the body perceives things differently in space, or that the organ responsible for balance is disturbed. We are currently working with a variety of potential explanations.”
Experience with connections between Earth and space
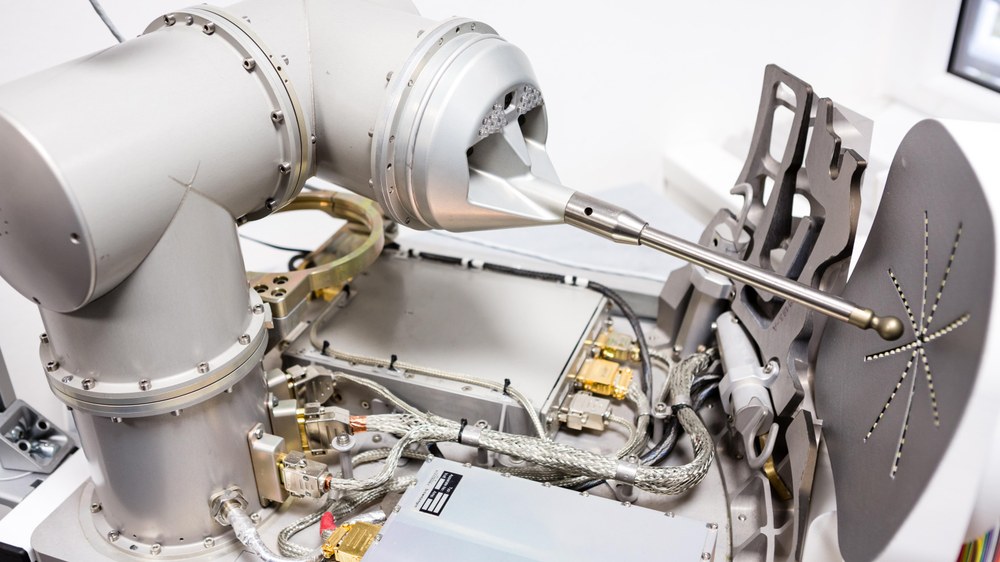
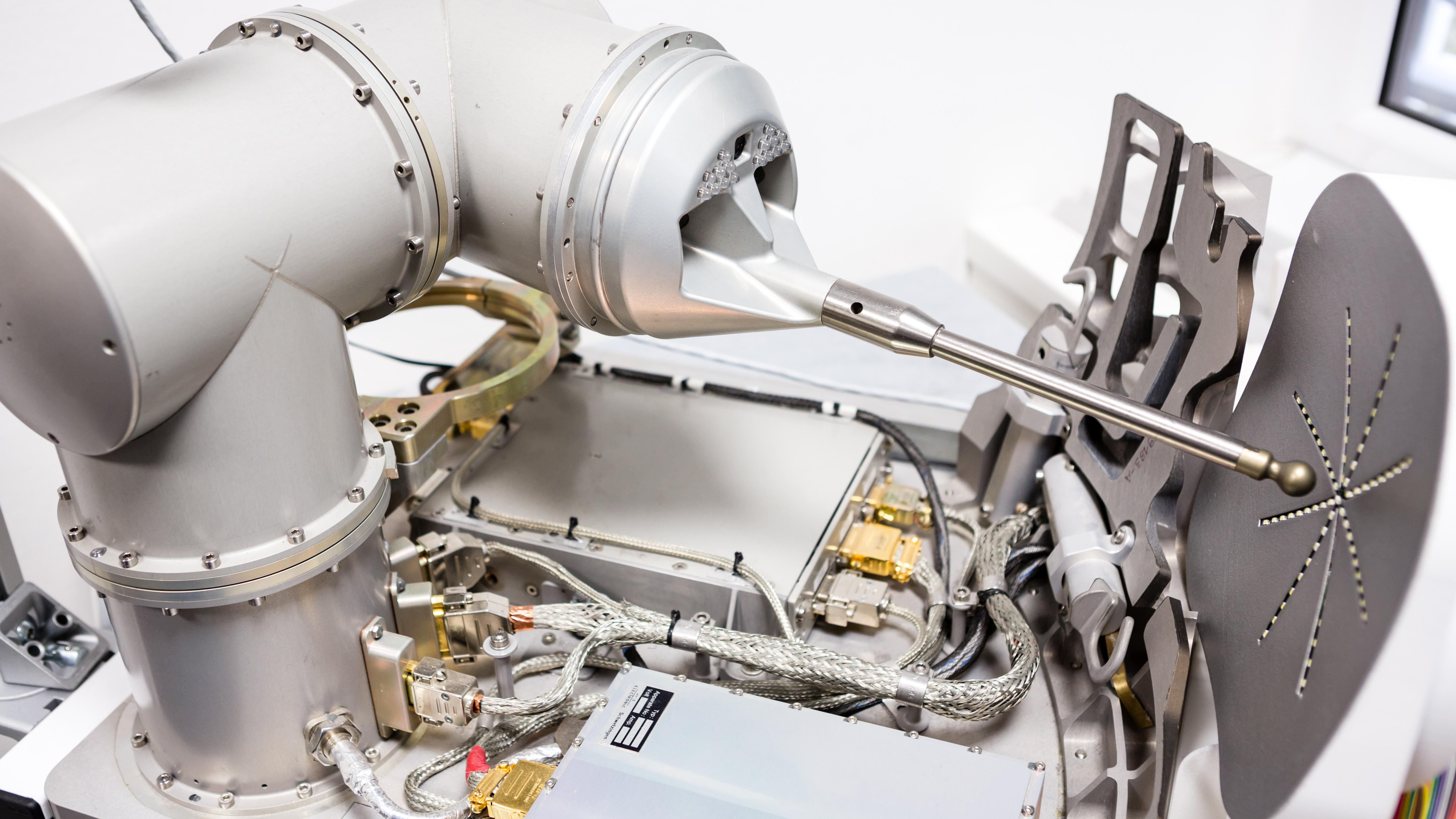
This experiment will feature a veteran of space robotics. From 2005 on, the ROKVISS robot arm spent five years installed on the exterior of the ISS, where it was operated by DLR in Oberpfaffenhofen. Upon its return to Earth, the robot arm – by then a seasoned space traveller – was made available to the project partner ZNII RTK (Russian State Scientific Center for Robotics and Technical Cybernetics) in St. Petersburg to train cosmonauts; the ROKVISS qualification model at DLR is now waiting to be moved by commands from space. On board the ISS, the ROKVISS computer and antenna systems will be used once more for this next-generation experiment. The newly-developed software for the KONTUR-2 experiment has already been installed in preparation. “The DLR Robotics and Mechatronics Center has acquired experience with this kind of experiment since as far back as the 90s,” emphasises institute director Alin Albu-Schäffer. As early as 1993, for instance, DLR scientists used remote control to operate the ROTEX robot arm in the Space Shuttle and to catch a floating cube. This was the very first deployment of ground-based remote control to operate a robot installed in space. “Also in 2005, we were the first to control a robot fitted to the ISS from the ground. The experiment also featured ROKVISS, and used force-feedback technology. Now we are making this technology available to the cosmonauts.”
Pulling a spring balance at a distance of 400 kilometres
The DLR scientists have put together an entire package of tasks that Kononenko will be asked to perform using the KONTUR-2 joystick in a microgravity environment from mid-August onwards. One of the first tasks will be to use the robot arm back on Earth to approach a target illuminated by an LED, and to reach this destination as quickly as possible. Another challenge will be to control the robot’s metal finger to trace a contour while remaining in light contact with it at all times. “This lets us see how good the contact information that the joystick transmits from Earth to the cosmonaut in outer space is,” explains Weber. In addition, the cosmonaut will be asked to use the joystick to control a spring balance fitted to ROKVISS, and to pull on it with a prescribed amount of force. The DLR scientists will be able to talk with Oleg Kononenko and issue the cosmonaut with further instructions to complete using the KONTUR-2 joystick.
A joystick for special requirements
Technically speaking, remote control from outer space is far from simple; the time delay is greater when the ISS is near the horizon than when it is passing directly over the DLR receiving antenna in Weilheim. Additionally, the bandwidth available for the remote connection is limited: “But actually, we will need a high clock frequency for our data volumes if we want to provide the cosmonaut with a realistic tactile experience,” emphasises Jordi Artigas, responsible for control technology within the project. He was tasked with finding solutions for precisely these very difficult conditions.
The joystick used in this kind of experiment is by no means off-the-shelf, either: “Our hardware had to pass 30 to 40 tests before it was even allowed on board the Soyuz spacecraft”, says Cornelia Riecke from the DLR Robotics and Mechatronics Center. “Electromagnetic compatibility, sufficiently robust to withstand the launch vibrations, no flammable materials or substances that may cause outgassing, and so on.” The requirements for space qualification are high, as is the stack of documentation that has to be submitted.
Further, the KONTUR-2 joystick needs two additional elements to allow the cosmonauts to control the robot arm back on Earth: a handgrip and an anchoring system. “Otherwise, the weightless environment might cause the cosmonauts to drift away unintentionally while operating the joystick,” says Weber. “And the joystick would immediately transmit this movement to our ROKVISS robot.”