The EDDY project supports cities and municipalities in using and sharing high-resolution and dynamic maps for the common good in order to optimise urban traffic and promote automated driving.
High-resolution and dynamic maps enable routes to be adapted at an early stage, for example in the event of roadworks or unfavourable road and traffic conditions. They are therefore an important prerequisite for optimising urban traffic with the aim of reducing emissions, protecting vulnerable road users and enabling higher levels of automated driving. However, a large proportion of dynamic traffic information is under the control of major vehicle manufacturers and navigation providers. This primarily serves commercial interests. Cities and local authorities, as owners of public space, have benefited little to date.
Conversely, the majority of newer vehicles are already equipped with sensors that can be used to collect dynamic data in the traffic area and share it publicly, at least in principle. However, this potential is hardly utilised - especially not for public user groups. For example, the combination of data from a large number of vehicles could provide the condition of the traffic area promptly and comprehensively - and not only for automated vehicles, but also for public tasks such as maintenance and needs-based traffic management measures.
EDDY provides the basis for cities and municipalities to make static and dynamic data available in an Urban Dynamic Map in a public interest-orientated and non-discriminatory manner. The data-based influence of local authorities on traffic management is improved and data sovereignty is maintained. The necessary technical and legal requirements as well as uniform standards will be made available to the various stakeholders from business and administration.
The DLR Institute of Transportation Systems is developing methods for the automatic generation of map information from vehicle sensor data, such as cameras, to link the information with data from other stakeholders. This will enable future automated and networked vehicles to generate added value for the public. The processes will be tested and demonstrated with the institute's own vehicles in the Hamburg area together with the project participants based there.
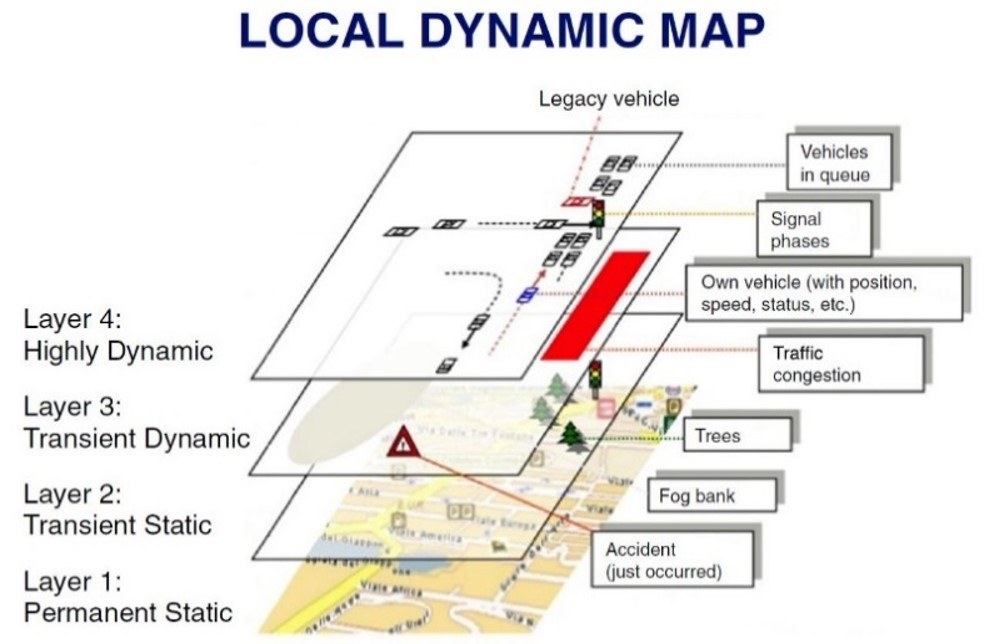
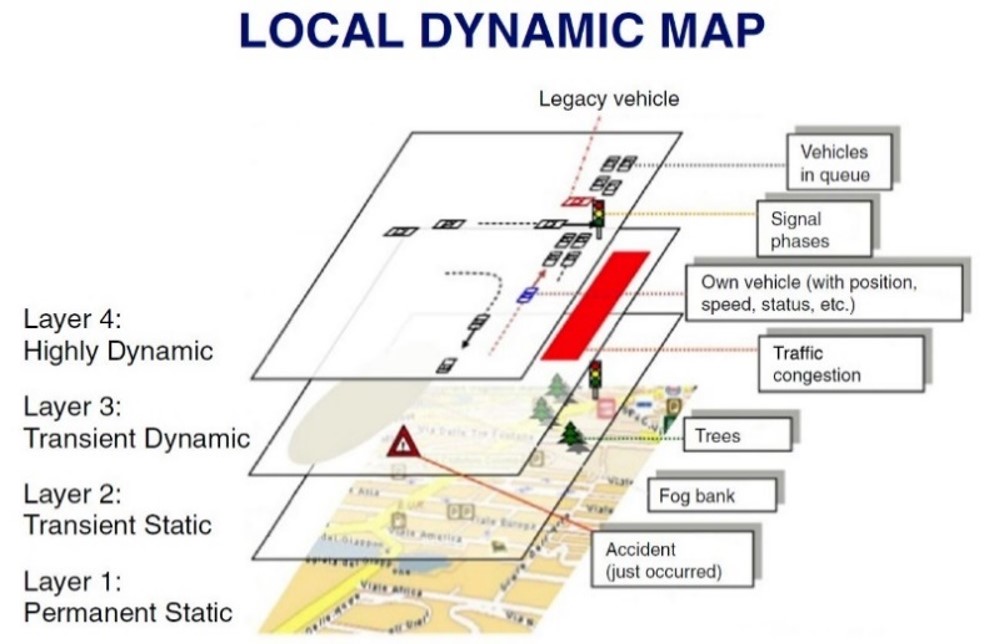
Visualisation of the different levels of the Local Dynamic Map.




{kind=link}