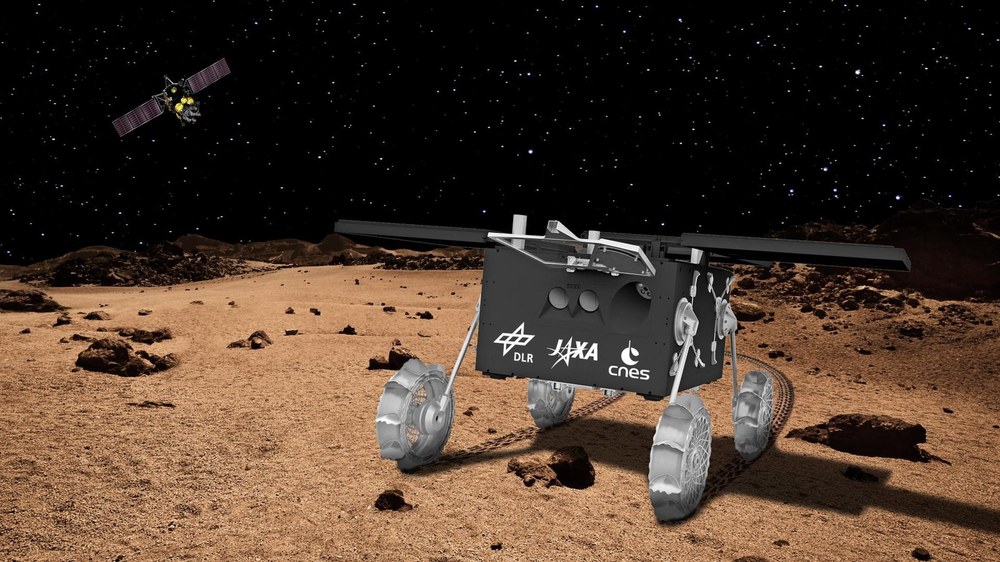
Die beiden Marsmonde Phobos und Deimos sind das Ziel der japanischen Erkundungsmission „Martian Moons eXploration“, kurz MMX. Das Deutsche Zentrum für Luft- und Raumfahrt (DLR) und die französische Raumfahrtagentur CNES (Centre National des Etudes Spatiales) sind mit dem Landefahrzeug IDEFIX beteiligt, das Phobos mehrere Wochen auf der Oberfläche erkunden wird.
Wie die Monde entstanden sind und woraus sie bestehen – dieses Rätsel will das internationale Team von Wissenschaftlerinnen und Wissenschaftlern lösen. Mehrere US-amerikanische Erkundungen und europäische Missionen – Mars Express (gestartet 2003) und ExoMars Gas Trace Orbiter (gestartet 2016) – lieferten bereits Daten und Bilder aus der Marsumlaufbahn, mit deren Hilfe die Monde beobachtet werden konnten. Eine geglückte Landung auf einem von ihnen gab es bis heute noch nicht. Über ihre geologischen, mineralogischen und geochemischen Eigenschaften ist daher wenig bekannt.
Die MMX-Raumsonde der japanischen Raumfahrtorganisation JAXA soll dies ändern: Sie wird die beiden Marsmonde detailliert aus dem Orbit untersuchen und erstmals Materialproben von Phobos sammeln. Zudem wird sie den MMX-Rover von DLR und CNES mitführen und auf Phobos absetzen. Voraussichtlich 2026 soll das ehrgeizige Vorhaben starten.
Europäischer Missionsanteil: der MMX-Rover IDEFIX
Das MMX-Landefahrzeug wird mehrere Aufgaben auf Phobos erfüllen: Zum einen soll es wichtige Erkenntnisse zur Vorbereitung der Landung des Mutterschiffes erbringen. Zum anderen wird er an interessanten Stellen die Oberflächenzusammensetzung und -beschaffenheit analysieren.
Acht DLR-Institute aus fünf Standorten tragen zum Rover bei: Das Institut für Robotik und Mechatronik ist mit der Gesamtprojektleitung und – gemeinsam mit dem Institut für Raumfahrtsysteme – mit dem Systemengineering beauftragt. Darüber hinaus entwickelte das Institut für Robotik und Mechatronik eine Softwarepipeline, um den Rover auf der Phobos-Oberfläche autonom zu navigieren. Gemeinsam waren die Institute für Robotik und Mechatronik sowie für Systemdynamik und Regelungstechnik für das Aufricht- und Fortbewegungssystem (Lokomotionssystem) des 25 Kilogramm schweren Rovers verantwortlich. Das Institut für Softwaretechnologie hat bei der Softwareentwicklung der Navigation und des Lokomotionsystems unterstützt.
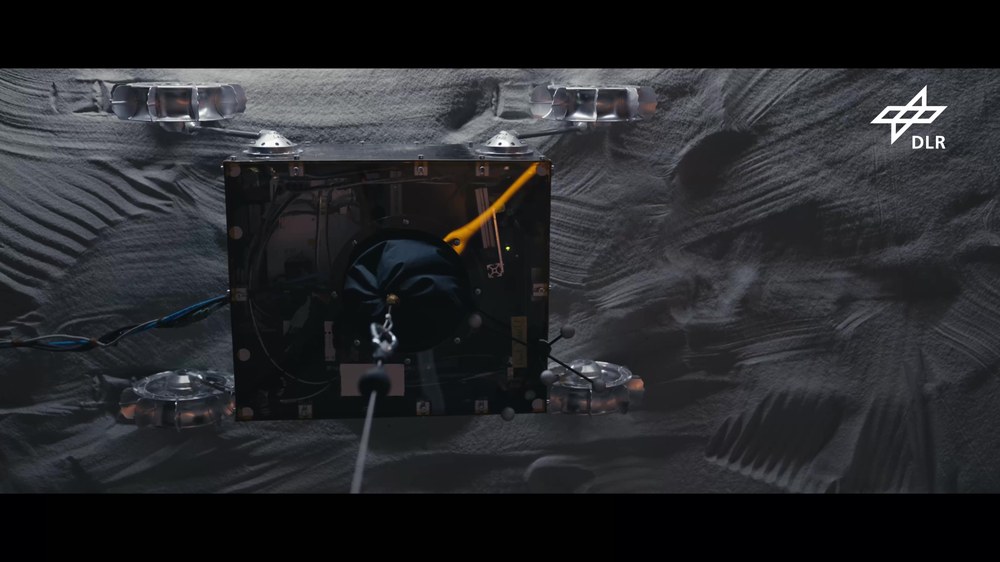
Aktuell laufen die letzten Arbeiten und Tests für die Fertigstellung des Rovers IDEFIX am CNES-Standort in Toulouse. In den letzten Monaten erfolgte dort die finale Integration aller Instrumente und Subsysteme. Zuvor hatte das DLR bereits die Carbonstruktur des Rovers samt Aufricht- und Fortbewegungssystem am Standort Bremen integriert und im November 2022 zur CNES nach Toulouse geliefert. IDEFIX soll im Rahmen Mission Martian Moons eXploration (MMX) auf dem Marsmond Phobos landen und diesen – trotz extrem geringer Schwerkraft – rollend erkunden. Die japanische Mission MMX hat beide Marsmonde, Phobos und Deimos, zum Ziel. Die MMX-Sonde wird beide Monde erkunden und schließlich Proben von Phobos sammeln und zur Erde schicken.
Video: Tests, Aufbau und Vorbereitung des deutsch-französischen Rovers IDEFIX für die Mission MMX
Für die Wiedergabe dieses Videos auf Quickchannel.com ist Ihre Zustimmung zur Speicherung von Daten ('Cookies') erforderlich. Unter Datenschutz-Einstellungen können Sie Ihre Wahl einsehen und verändern.
Video: Tests, Aufbau und Vorbereitung des deutsch-französischen Rovers IDEFIX für die Mission MMX
Aktuell laufen die letzten Arbeiten und Tests für die Fertigstellung des Rovers IDEFIX am CNES-Standort in Toulouse. In den letzten Monaten erfolgte dort die finale Integration aller Instrumente und Subsysteme. Zuvor hatte das DLR bereits die Carbonstruktur des Rovers samt Aufricht- und Fortbewegungssystem am Standort Bremen integriert und im November 2022 zur CNES nach Toulouse geliefert. IDEFIX soll im Rahmen Mission Martian Moons eXploration (MMX) auf dem Marsmond Phobos landen und diesen – trotz extrem geringer Schwerkraft – rollend erkunden. Die japanische Mission MMX hat beide Marsmonde, Phobos und Deimos, zum Ziel. Die MMX-Sonde wird beide Monde erkunden und schließlich Proben von Phobos sammeln und zur Erde schicken.
Die CNES leistet wesentliche Beiträge mit Kamerasystemen zur räumlichen Orientierung und Erkundung auf der Oberfläche sowie zur Untersuchung der mechanischen Bodeneigenschaften. Darüber hinaus entwickelt die CNES das zentrale Service-Modul des Rovers inklusive des Onboard-Computers sowie des Energie- und Kommunikationssystems. Finale Integration und Tests finden bei der CNES in Toulouse statt. Nach dem Start der MMX-Mission wird der Rover von Kontrollzentren des DLR MUSC in Köln und der CNES in Toulouse (Frankreich) betrieben.
Der Missionsablauf
Voraussichtlich 2026 soll MMX mit einer H-3-Trägerrakete vom japanischen Startplatz Tanegashima abheben. Nach circa einjähriger Flugzeit wird MMX den Mars erreichen und in seine Umlaufbahn einschwenken. Dann beginnen die acht wissenschaftlichen Instrumente des Explorationsmoduls mit der Kartierung und Charakterisierung der Oberflächen von Phobos und Deimos. Für 2029 ist die Landung des Rovers auf Phobos vorgesehen. Hierbei wird der Rover aus einer Höhe von 40 bis 100 Metern über der Oberfläche abgesetzt. Nach der Landung – und voraussichtlich einigen kleinen Hüpfern – wird er sich selbständig aufrichten und dann einsatzbereit machen. Anschließend beginnt die rund dreimonatige Messphase, innerhalb derer der Rover verschiedene Ziele anfährt, die interessant für die wissenschaftliche Analyse sind.
Zum Abschluss der Mission werden durch die Muttersonde, unter Berücksichtigung der durch den Rover gewonnenen Erkenntnisse, Bodenproben gesammelt, die mit dem Rückkehrmodul zurück zur Erde gebracht werden. Dort sollen sie 2031 ankommen, um weiter in irdischen Laboren analysiert zu werden. Die japanische Raumfahrtorganisation JAXA ist prädestiniert für eine solch anspruchsvolle Aufgabe: Zuletzt gelang 2020 es der Mission „Hayabusa 2“, Material des Asteroiden Ryugu zur Erde zurückzubringen. Schon bei Hayabusa 2 waren DLR und CNES mit dem Lander MASCOT beteiligt.
Kontakt
Dr. Stefan Barthelmes
Deutsches Zentrum für Luft- und Raumfahrt (DLR)
Institut für Systemdynamik und Regelungstechnik