
MMX Mission: A rover for the Martian moon Phobos
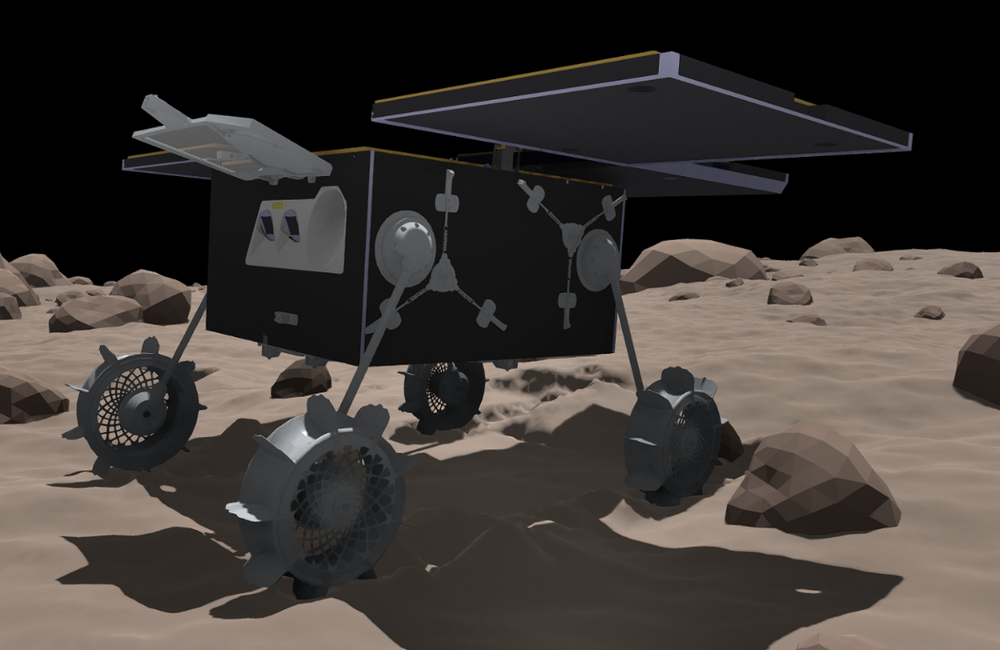


The DLR Institute of System Dynamics and Control is carrying out complex simulations to analyse how the MMX rover will behave on Phobos under reduced gravity conditions. The simulation shown in the video shows the particularly challenging mission phase of the final moments of landing with the subsequent erection and deployment of the solar panels and the orientation towards the sun. After this fully autonomous sequence, the MMX rover is able to optimally charge its battery for the first journey to Phobos. Simulations like this are used in the project to generate important insights for the further development of the rover. The real-time visualisation was created using the DLR Visualization2 Modelica library. This software library allows the visualisation of a wide variety of physical systems (vehicles/aircraft/spacecraft, robots and automation technology, etc.).
MMX-Rover Simulation
MMX-Rover Simulation
The DLR Institute of System Dynamics and Control is carrying out complex simulations to analyse how the MMX rover will behave on Phobos under reduced gravity conditions. The simulation shown in the video shows the particularly challenging mission phase of the final moments of landing with the subsequent erection and deployment of the solar panels and the orientation towards the sun. After this fully autonomous sequence, the MMX rover is able to optimally charge its battery for the first journey to Phobos. Simulations like this are used in the project to generate important insights for the further development of the rover. The real-time visualisation was created using the DLR Visualization2 Modelica library. This software library allows the visualisation of a wide variety of physical systems (vehicles/aircraft/spacecraft, robots and automation technology, etc.).
Credit: