Die Elektronikkomponenten des mechatronischen Fahrwerks


{kind=link}
{kind=link}
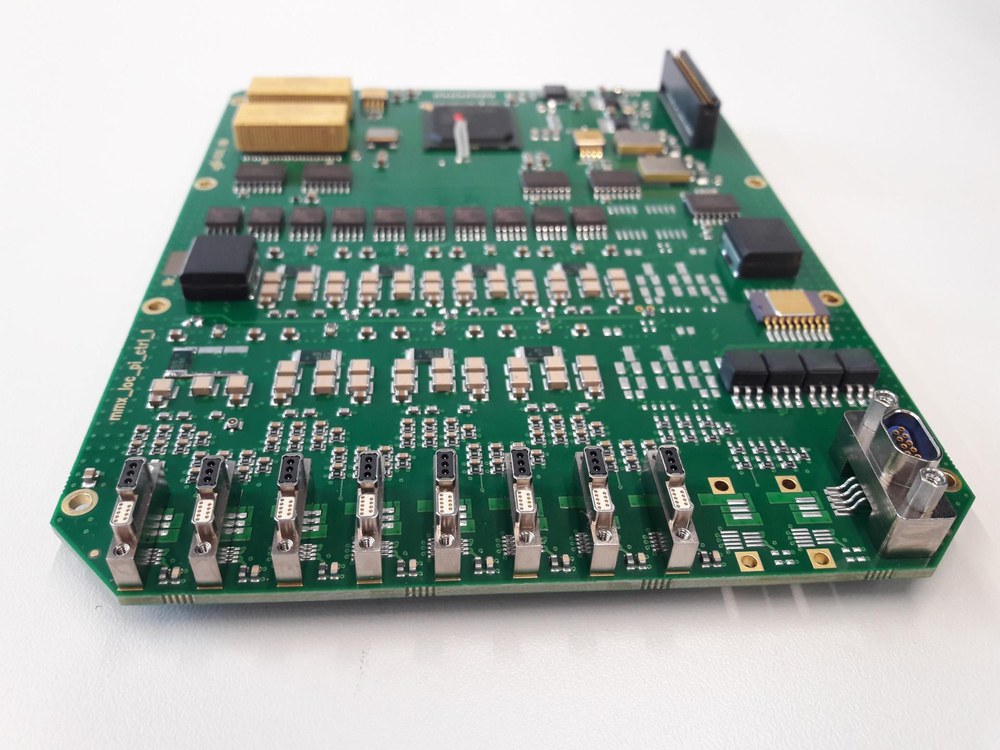
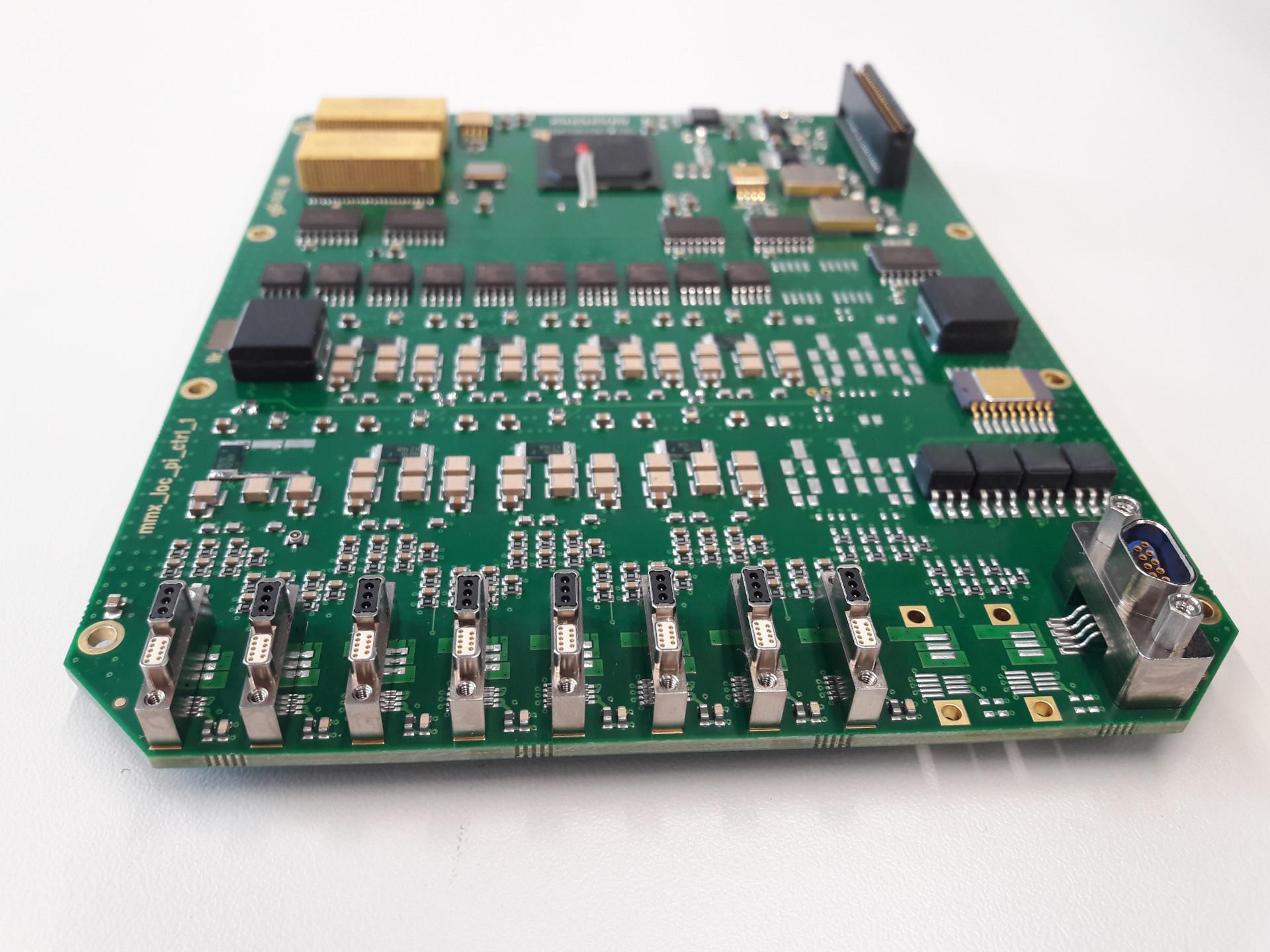
Eine zentrale Komponente im mechatronischen Fahrwerk des MMX-Rovers ist die vom DLR-Robotik und Mechatronik Zentrum entwickelte Elektronikbox. Diese Box birgt die analogen und digitalen Schaltungen, die für den Betrieb des Rovers erforderlich sind. Wesentliche Teilaufgaben erfüllen dabei die Messtechnik, die Leistungselektronik sowie die Kommunikationseinheit. Die Messtechnik sammelt und digitalisiert die Signale aus den verschiedenen im Lokomotionsystem vorhandenen Sensoren. Mit ihrer Hilfe werden Motorströme, Drehmomente, Gelenkpositionen, Temperaturen, Beschleunigungen und Drehraten erfasst.
Die Leistungselektronik steuert die Motoren für Schultergelenke und Räder an. Über eine SpaceWire-Schnittstelle kommuniziert die Elektronikbox mit dem übergeordneten Bordcomputer und macht dadurch das mechatronische Fahrwerk für das Rover-Gesamtsystem verfügbar. Alle Funktionen innerhalb der Elektronikbox werden von einer Firmware gesteuert, die auf einem programmierbaren integrierten Schaltkreis mit logischen Funktionen (Field Programmable Gate Array, FPGA) läuft. In dieser Kernkomponente kommen alle Stränge von Sensorik, Aktuatoren, die Signale in mechanische Bewegung umwandeln, und Kommunikation zusammen.
Die Elektronikbox bildet die Schnittstelle zwischen der Software, die den Rover steuert, und der physischen Interaktion mit der Umgebung, die durch die mechanischen Fahrwerkskomponenten sowie die Sensoren erfolgt. Von der Stromverteilungseinheit des Rovers (Power Control Distribution Unit, PCDU) wird die Elektronikbox des Lokomotionsystems mit Energie versorgt.
Extreme Umgebungsbedingungen für den Rover
Um die Lokomotionelektronik währen der gesamten Laufzeit des Rovers sicher und zuverlässig betreiben zu können, sind einige herausfordernde Randbedingungen bei der Konstruktion zu beachten: Sowohl während des Flugs als auch im Einsatz auf dem Marsmond Phobos herrschen extreme Umgebungsbedingungen denen der Rover standhalten muss. Insbesondere treten sehr hohe und sehr tiefe Temperaturen auf, und der Wechsel zwischen diesen Extremen erfolgt sehr schnell. Selbst raumfahrqualifizierte Elektronikbauteile wären unter diesen Bedingungen nicht zuverlässig zu betreiben. Deshalb sind alle Elektronikkomponenten soweit wie möglich in der Elektronikbox zusammengefasst, die im thermisch isolierten Innenbereich des Rovers untergebracht ist.
Durch die thermische Isolation sowie eine bedarfsgeregelte Heizung kann die thermische Belastung auf ein Maß beschränkt werden, das den sicheren Betrieb der Bauteile ermöglicht. Weiterhin ist beim thermischen Design der Elektronik darauf zu achten, dass aufgrund der fehlenden Atmosphäre kein Wärmeaustausch durch Strömungstransport stattfindet. Insbesondere Bauteile, in denen viel Energie umgesetzt wird, wie zum Beispiel Motortreiber und FPGA, müssen daher so angebunden werden, dass eine ausreichende Wärmeabfuhr über Wärmeleitung und Strahlung stattfinden kann.
Um die während des Flugs und des Einsatzes auf Phobos zu erwartende kosmische Strahlung beschädigungsfrei verkraften zu können, ist das Design auf 10krad Total Ionizing Dose (TID) ausgelegt. Soweit verfügbar, wurden dafür entsprechend qualifizierte Bauteile verwendet. Einzelne kommerzielle Komponenten mussten jedoch durch Tests für den Einsatz qualifiziert werden. Beim mechanischen Aufbau der Leiterplatten sowie des Elektronikboxgehäuses sind zum einen die Erschütterungsbelastungen zu beachten, die vor allem beim Raketenstart auftreten. Andererseits darf das System aber auch nicht zu schwer sein. Für den Betrieb muss die Elektronik möglichst verbrauchsarm ausgelegt sein. Insbesondere während der Aufrichtphase ist der Rover allein auf die Versorgung aus der mitgeführten Batterie angewiesen. Erst danach können die Solarpanels entfaltet werden. Nicht zuletzt muss das mechatronische Fahrwerk auch elektromagnetisch mit den anderen Teilsystemen kompatibel sein, um einen sicheren und störungsfreien Betrieb des Rovers zu gewährleisten.
Sicherer Betrieb in jeder Situation
Hauptaufgabe der Lokomotionelektronik ist der synchrone Betrieb aller Motoren in den Rädern und Schultergelenken zum Aufrichten, Fahren und Positionieren des Rovers. Hierzu kommen integrierte Motortreiberbausteine zum Einsatz. Die Motoren werden mithilfe von Hall-Sensoren geregelt und überwacht. Beim Ausfall eines Sensors ist aber auch ein gesteuerter Betrieb der Motoren möglich.
Eine Stromüberwachung sorgt für den sicheren Betrieb der Motoren. In den Schultergelenken sind auf Potentiometern basierende Positionssensoren sowie auf Dehnungsmessstreifen basierende Momentensensoren integriert. Die analogen Ausgangsspannungen dieser Sensoren werden zur Elektronikbox geführt. Dort werden sie verstärkt, gefiltert und mithilfe von Analog/Digital-Wandlern (A/D-Wandler) für die weitere Verarbeitung in der Steuerung digitalisiert. Des Weiteren befindet sich in jeder Schulter ein dreiachsiger Beschleunigungssensor zur Aufzeichnung des Landevorgangs. Die analogen Beschleunigungssignale werden ebenfalls durch die A/D-Wandler in der Elektronikbox digitalisiert. Zur Offline-Aufzeichnung der Beschleunigungsdaten während des gesamten Landevorgangs steht ein magnetoelektronischer Speicher zur Verfügung.
Wenn nach dem Aufrichten des Rovers eine Kommunikationsverbindung besteht, können diese Daten dann zum Mutterschiff übertragen werden und geben somit Auskunft über die Oberflächenbeschaffenheit von Phobos. Der Aufrichtvorgang wird durch die in der Elektronikbox integrierten Drehratensensoren unterstützt. Sowohl in den Schultern als auch an kritischen Punkten in der Elektronikbox überwachen Temperatursensoren den zulässigen Temperaturbereich. Durch Heizelemente werden die Komponenten in ihrem erlaubten Temperaturbereich gehalten und bei Bedarf auf Betriebstemperatur gebracht. Einzelne Teilkomponenten der Elektronik können je nach Bedarf zu- und abgeschaltet werden, um den Energieverbrauch zu minimieren.
Umfangreiche Tests für alle elektronischen Bauteile
Um die Einhaltung der Anforderungen zu überprüfen, wurden zahlreiche Qualifikations- und Abnahmetests durchgeführt: Zunächst wurde mit der Elektronikbox ein mehrtägiger „Burn-in-Test“ bei maximaler Temperatur durchgeführt. Dadurch wird gewährleistet, dass eventuell vorgeschädigte Bauteile, die zu Frühausfällen führen können, erkannt werden. In Thermalvakuumtests und Vibrationstests wurde die thermische und mechanische Widerstandsfähigkeit der Elektronikbox nachgewiesen. In Tests zur elektromagnetischen Verträglichkeit wurde überprüft, dass die Elektronik gegen die zu erwartenden Störungen von außen immun ist und keine Störungen aussendet, welche die Funktion anderer Teilsysteme des Rovers beeinträchtigen. Um die geforderte Funktion nachzuweisen, wurden am Anfang und am Ende der Testkampagne sowie zwischen den Tests immer wieder Funktionaltests durchgeführt.
MMX – Martian Moons eXploration
MMX ist eine Mission der japanischen Weltraumorganisation JAXA mit Beiträgen von NASA, ESA, der französischen Raumfahrtagentur CNES und dem Deutschen Zentrum für Luft- und Raumfahrt (DLR). CNES und DLR steuern zusammen einen 25 Kilogramm schweren Rover bei. Der deutsch-französische MMX-Rover wird unter gemeinsamer Leitung der beiden Partner entworfen und gebaut. Das DLR übernimmt dabei insbesondere die Entwicklung des Rover-Fahrwerks samt Carbonstruktur sowie des gesamten Aufricht- und Fortbewegungssystems. Zudem steuert das DLR das Verbindungs- und Separationssysten zur Muttersonde bei und stellt ein Raman-Spektrometer sowie ein Radiometer als wissenschaftliche Experimente. Diese werden die Oberflächenzusammensetzung und -beschaffenheit auf Phobos messen. Die CNES leistet wesentliche Beiträge mit Kamerasystemen zur räumlichen Orientierung und Erkundung auf der Oberfläche sowie zur Untersuchung der mechanischen Bodeneigenschaften. Darüber hinaus entwickelt die CNES das zentrale Service-Modul des Rovers inklusive des Onboard-Computers sowie des Energie- und Kommunikationssystems. Nach dem Start der MMX-Mission wird der Rover von Kontrollzentren der CNES in Toulouse (Frankreich) und des DLR in Köln betrieben.
Seitens des DLR sind unter der Leitung des Instituts für Robotik und Mechatronik zudem die Institute für Systemdynamik und Regelungstechnik, für Faserverbundleichtbau und Adaptronik, für Raumfahrtsysteme, für Optische Sensorsysteme, für Planetenforschung, für Softwaretechnologie sowie das Nutzerzentrum für Weltraumexperimente (MUSC) beteiligt.
Die Mission MMX steht in der Tradition einer bereits langjährigen erfolgreichen Kooperation der Partner JAXA, CNES und DLR. Sie knüpft an die Vorgängermission Hayabusa2 an, bei der die JAXA eine Raumsonde zum Asteroiden Ryugu schickte mit dem deutsch-französischen Lander MASCOT an Bord. Am 3. Oktober 2018 landete MASCOT auf Ryugu und sendete spektakuläre Bilder einer faszinierenden zerklüfteten Landschaft aus Geröll und Steinen. Hayabusa2 nahm Proben von Ryugu und brachte diese am 6. Dezember 2020 zurück zur Erde.