{kind=link}
{kind=link}
Broschüre: Mission Insight (2018)
0.99 MB | PDF
Blick in das Innere des Mars


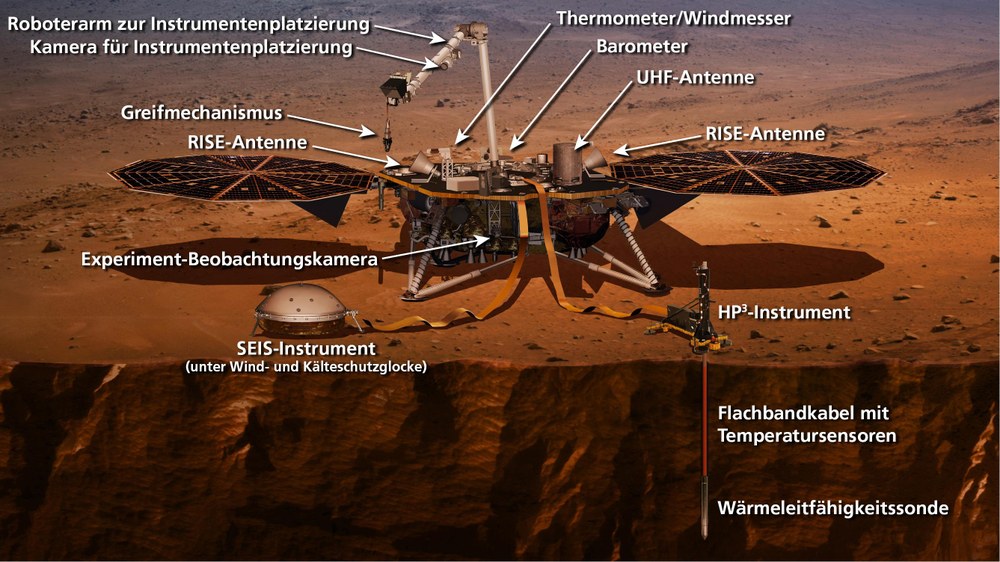
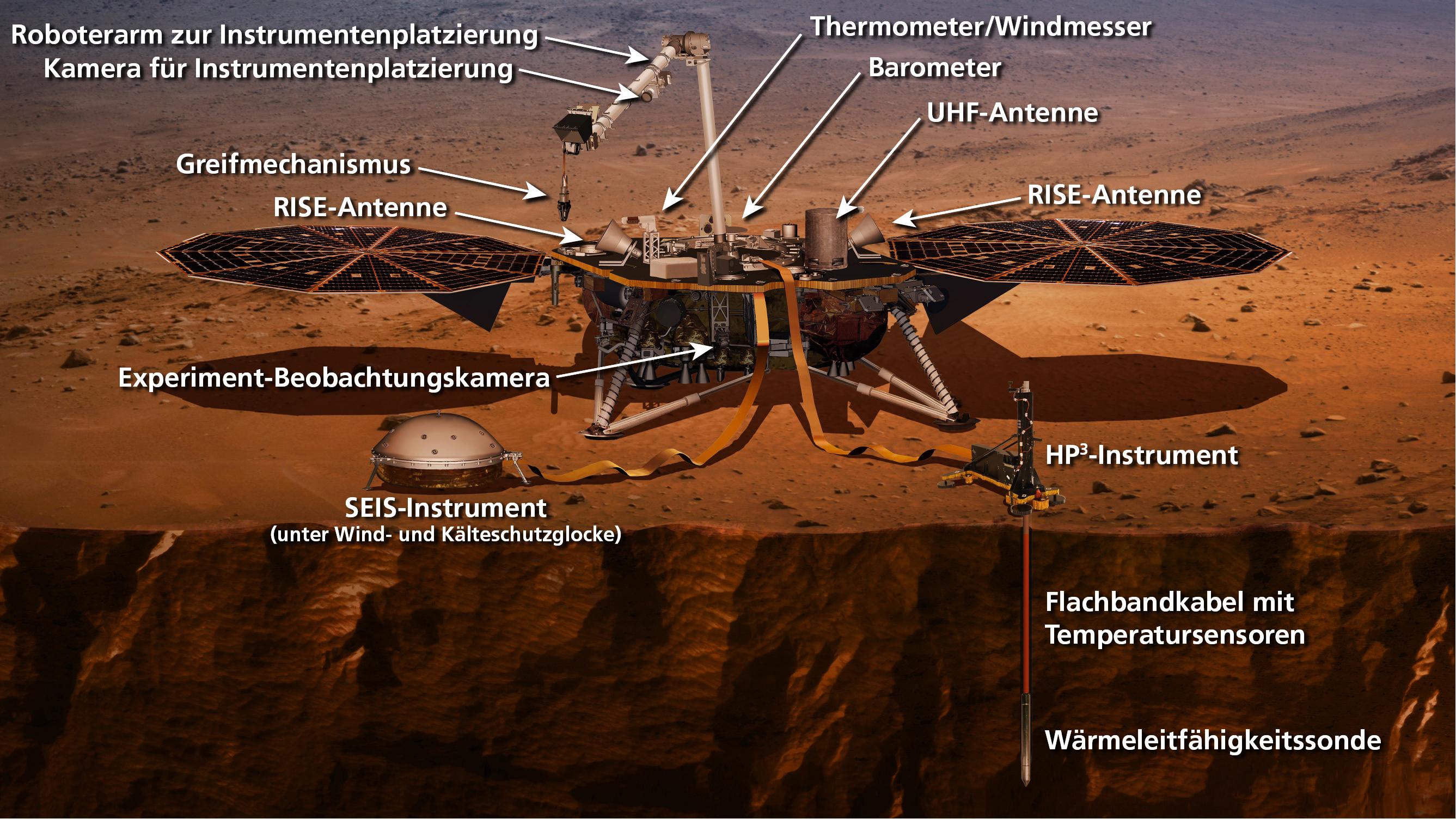
Mit der Landesonde InSight werden die beiden Hauptexperimente HP3 und SEIS zum Mars gebracht. Nach der Landung wird sie ein Roboterarm neben der Raumsonde platzieren. Weitere Experimentkomponenten sind auf der Landesonde selbst angebracht. Dort befindet sich auch das Experiment RISE, das die Verschiebung in den Wellenlängen des Funkverkehrs (Dopplereffekt) aufzeichnet, um minimale Schwankungen der Neigung der Rotationsachse des Mars zu messen.
Das Design der Landesonde ist zu großen Anteilen baugleich zur Phoenix-Landesonde der NASA, die am 25. Mai 2008 in der Nähe des Marsnordpols gelandet war. Sie führte sechs Monate lang Experimente durch und konnte dabei beim Schürfen mit einer Baggerschaufel erstmals Wassereis in Form von Raureif nachweisen. Das Raumfahrtunternehmen Lockheed Martin Space Systems begann im Auftrag der NASA im Mai 2014 mit dem Bau der InSight-Sonde. Ursprünglich war der Start der Mission für 2016 geplant, wurde aber wegen eines Lecks in einem Vakuumbauteil im Seismometer SEIS von der NASA auf 2018 verschoben. Hauptbestandteil der Landesonde ist eine Plattform von zwei Metern Durchmesser, auf der die meisten Systemkomponenten, die Experimente in ihrem „Reisemodus“, die Antennen, der Bordcomputer, die Bremstriebwerke, die Treibstofftanks und drei Teleskopbeine angebracht sind. Ein Roboterarm wird nach der Landung ausgeklappt und hebt die Experimente HP3 und SEIS von der Plattform auf den Marsboden. Seitlich der Plattform sind zwei Solarpanele angebracht – ausgeklappt hat InSight dann eine Spannweite von 610 Zentimetern. Die Gesamtmasse von InSight beträgt 360 Kilogramm.
Bei dieser Mission werden auch zwei Kleinsatelliten zum Einsatz kommen: MarCO (Mars Cube One). Sie beruhen auf dem CubeSat-Konzept, bei dem würfelförmige Module mit zehn Zentimeter Kantenlänge zu größeren Satelliten kombiniert werden. Jeder der beiden MarCOs besteht aus sechs CubeSat-Einheiten. Sie werden nach dem Verlassen der Erdumlaufbahn von der Raumsonde InSight abgetrennt und begleiten die Sonde auf ihrem Weg zum Mars auf einer eigenen Flugbahn. Dort treten sie in eine Marsumlaufbahn ein. Sie haben die Aufgabe während des Anflugs und der Landung von InSight, mithin der kritischsten Missionsphase (EDL, Entry, Descent and Landing), die Kommunikation zwischen InSight und dem Mars Reconnaissance Orbiter (MRO) der NASA in der Umlaufbahn über dem Eintrittsgebiet aufrechtzuerhalten. Es ist das erste Mal, dass Kleinsatelliten an einem anderen Himmelskörper zum Einsatz kommen. Das Projekt hat den Status einer Technologie-Demonstration und ist für den Erfolg von InSight nicht kritisch.
Das am DLR entwickelte Experiment HP3 besteht zunächst aus einem Instrumentengehäuse, in dem das Messkabel und das Datenkabel für die Verbindung mit der Landesonde untergebracht sind. An diesem Gehäuse ist vorne ein 'Bohrturm' angebracht, in dem sich der Schlaghammer vor seinen Einsatz befindet. Die etwa 40 Zentimeter lange Rammsonde mit einem Durchmesser von 27 Millimetern, der 'Maulwurf', kann sich mit einem Hammerschlagmechanismus bis zu fünf Meter tief in den Marsboden treiben. Herzstück des Experiments ist ein mit Temperatursensoren bestücktes Messkabel, das die Rammsonde hinter sich her in den Boden zieht. Es ist mit dem Gehäuse auf der Oberfläche, der SSA (Support-System Assembly) oder 'Sphinx', verbunden. Die Platin-Temperatursensoren werden ein Marsjahr lang (entspricht zwei Erdenjahren) Messwerte im Abstand von 35 Zentimetern Bodentiefe bis aus fünf Meter Tiefe im Stundentakt aufzeichnen. Die Messgenauigkeit der Sensoren auf dem Messkabel beträgt wenige Tausendstel Kelvin. Modellrechnungen zeigen, dass für eine solide Bestimmung des Wärmeflusses aus dem Inneren des Mars mindestens einige Monate veranschlagt werden müssen. Das 'Gehirn' des Experiments, eine Elektronikbox, befindet sich im InSight-Landemodul, wo sie vor zu großen Temperaturschwankungen geschützt ist. Über die Elektronikbox wird das Experiment von der Boden-Kontrollstation des DLR (MUSC) in Köln gesteuert.
Idealerweise hat der Schlagmechanismus nach etwa zwei Monaten eine Tiefe von fünf Metern erreicht, um dort den von den schwankenden Temperaturen an der Oberfläche unbeeinflussten Wärmefluss aufzeichnen zu können. Die dafür erforderliche Mindesttiefe beträgt drei Meter. Der Maulwurf hämmert jedoch nicht ununterbrochen, sondern insgesamt nur etwa zehn Tage und wird in Intervallen von 50 Zentimetern in den Boden eindringen. Nach jeweils zweitägigen Pausen nach einer Bohrung, die der Abkühlung dienen, wird der Bohrfortschritt ausgewertet und anschließend die Außenhülle des Maulwurfs 24 Stunden lang von einer Heizung im Innern erwärmt. Dann wird gemessen, wie schnell die Wärme vom Metall des Maulwurfs in die unmittelbare Bohrumgebung abgegeben wird: Damit kann die Wärmeleitfähigkeit des Marsbodens, des sogenannten Regoliths, an der Landestelle bestimmt werden. Das ermöglicht auch Abschätzungen von Eigenschaften des Bodens wie Porosität oder Festigkeit. Ein Neigungsmesser registriert, ob die Bohrung gerade in den Boden verläuft oder wegen Hindernissen von der Senkrechten abweicht.
Von der Sphinx besteht über ein zweites Datenkabel Kontakt mit dem Bordcomputer von InSight, von dem aus die Messwerte zu einem Orbiter in der Marsumlaufbahn und von dort zur Erde übertragen werden. Zum Experiment gehört außerdem ein Infrarot-Radiometer, das von der Landesonden-Plattform aus den täglichen Temperaturverlauf während eines Marsjahres an der Landestelle misst. Der Betrieb von HP3 erfolgt durch das Nutzerzentrum für Weltraumexperimente (MUSC) des DLR in Köln. Die wissenschaftliche Leitung des Experiments obliegt dem DLR-Institut für Planetenforschung, in dem das Experiment auch federführend entwickelt wurde – in Zusammenarbeit mit den DLR-Instituten für Raumfahrtsysteme (Bremen), Optische Sensorsysteme (Berlin), Raumflugbetrieb und Astronautentraining mit seiner Zweigstelle in Köln, Faserverbundleichtbau und Adaptronik (Braunschweig), Systemdynamik und Regeltechnik (Oberpfaffenhofen) sowie Robotik und Mechatronik (Oberpfaffenhofen). Industrielle Partner waren Astronika (Warschau), Magson (Berlin) und Sonaca (Berlin).
SEIS ist ein Seismometer zur Messung der Bewegungen im Marsboden in verschiedenen Frequenzen. Es besteht aus insgesamt sechs Sensoren: einem Dreikomponenten-Breitbandseismometer (very broad band sensor, VBB) und einem kurzperiodischen Dreikomponenten-Mikrosensor (short period sensor, SP). Das Instrument wurde unter Federführung der französischen Weltraumagentur (CNES) von einem Konsortium entwickelt, Deutschland ist an SEIS mit dem am Max-Planck-Institut für Sonnensystemforschung in Göttingen entwickelten und gebauten Lagekontrollsystem (LVL) beteiligt.
Mit einem Seismometer werden Bodenerschütterungen aufgezeichnet. Auf der Erde können massive Erschütterungen von Erdbeben oder Explosionen ausgelöst werden. Die Bebenwellen wandern dann durch den ganzen Planeten und können, eine hinreichend starke Quelle vorausgesetzt, überall auf der Welt aufgezeichnet werden. Kleinere Erschütterungen sind uns im Alltag von vorbeifahrenden Zügen vertraut, oder, seltener, von einstürzenden Hohlräumen unter der Erde, was in aufgelassenen Minen gelegentlich vorkommt. Für die Messung macht man sich das Prinzip der Trägheit von Massen zu Eigen: Jede Masse ist bestrebt, ihren gegenwärtigen Bewegungszustand beizubehalten. Erst wenn eine Kraft auf die Masse einwirkt, verändert sie ihren Bewegungszustand, beispielsweise durch Beschleunigung oder Abbremsen. Bewegt man also die Aufhängung eines Pendels ruckartig zur Seite, so bleibt die Pendelmasse zunächst stehen und folgt dann nach. Auf dem Mars erhoffen sich die Wissenschaftler die Aufzeichnung von seismischen Wellen, die durch Marsbeben erzeugt werden – also tektonischen Ursprungs sind – oder vom Einschlag von Meteoriten herrühren.
Das Herzstück des SEIS-Experiments besteht aus zweimal drei extrem empfindlichen Pendeln, die auch kleinste Bewegungen der Marsoberfläche registrieren. Der Ausschlag der Pendel wird elektronisch aufgezeichnet. Ein Rückkopplungsmechanismus versucht die Pendel in Ruhe zu halten: Die dazu notwendige Kraft ist die eigentliche Messgröße. Solche sogenannten Nullinstrumente erlauben eine erheblich empfindlichere Messung. Motoren, die das ganze System in kleinen Schritten in alle Richtungen neigen können, ermöglichen eine perfekte horizontale Ausrichtung von SEIS. Das größte Problem für dauerhaft zuverlässige Messungen auf dem Mars sind die großen Temperaturunterschiede zwischen Tag und Nacht und von Sommer zu Winter. Weil sich Materialien bei Wärme ausdehnen und bei Kälte zusammenziehen, ist SEIS mit einem raffinierten Thermalsystem in Form von mehreren Isolationshüllen ausgestattet (vergleichbar mit einer 'Matroschka-Puppe'). Die Hüllen gleichen diese Temperaturunterschiede aus, sodass im Instrument dauerhaft stabile Messbedingungen herrschen. SEIS ist vor den Einflüssen des Marswindes und den mit ihm transportierten Staub von eine halbkugelförmigen Kuppel geschützt, die aus mehreren Einzelschichten besteht.
Das Experiment RISE des Jet Propulsion Laboratory der NASA zeichnet die Verschiebung in den Wellenlängen des X-Band-Funkverkehrs (Mikrowellen, 7-11 Gigahertz) auf, um minimale Schwankungen der Neigung der Rotationsachse des Mars zu messen, die wiederum auf Homogenitätsunterschiede im Inneren des Planeten hinweisen. Das Experiment soll Daten ergänzen, die mit den Viking-Landsonden in den 1970er-Jahren sowie mit der Mission Mars Pathfinder (1997) aufgezeichnet wurden, mit denen wesentliche Hinweise auf die Größe des Kerns im Mars gewonnen wurden. Der mit InSight angestrebte dritte Datensatz soll dazu beitragen, die Nutation der Marsachse zu beschreiben. Die Nutation, gewissermaßen ein 'Taumeln' der Drehachse, ist das von der Massenverteilung im Innern des Planeten herrührende Abweichen von dem Kreis, den die Marsachse in den Himmel 'zeichnet', weil sich ihre Richtung über lange Perioden durch den Einfluss von großen, massereichen Himmelskörpern wie der Sonne und dem benachbarten Jupiter verändert. Die Nutation prägt dieser kreisförmigen Bewegung, der Präzession, eine kleine Schlangenlinie auf.
Eine am Teleskoparm angebrachte Kamera wird 3D-Farbaufnahmen von der unmittelbaren Landestellenumgebung und vor allem von den Stellen auf dem Boden neben der Landesonde machen, die für das Ausbringen von HP3 und SEIS vorgesehen sind. Mit ihrer Hilfe werden ebenfalls die Aktivitäten der Experimente überwacht.