Auf dem Weg zur Messung

Auf dem Weg zur Messung
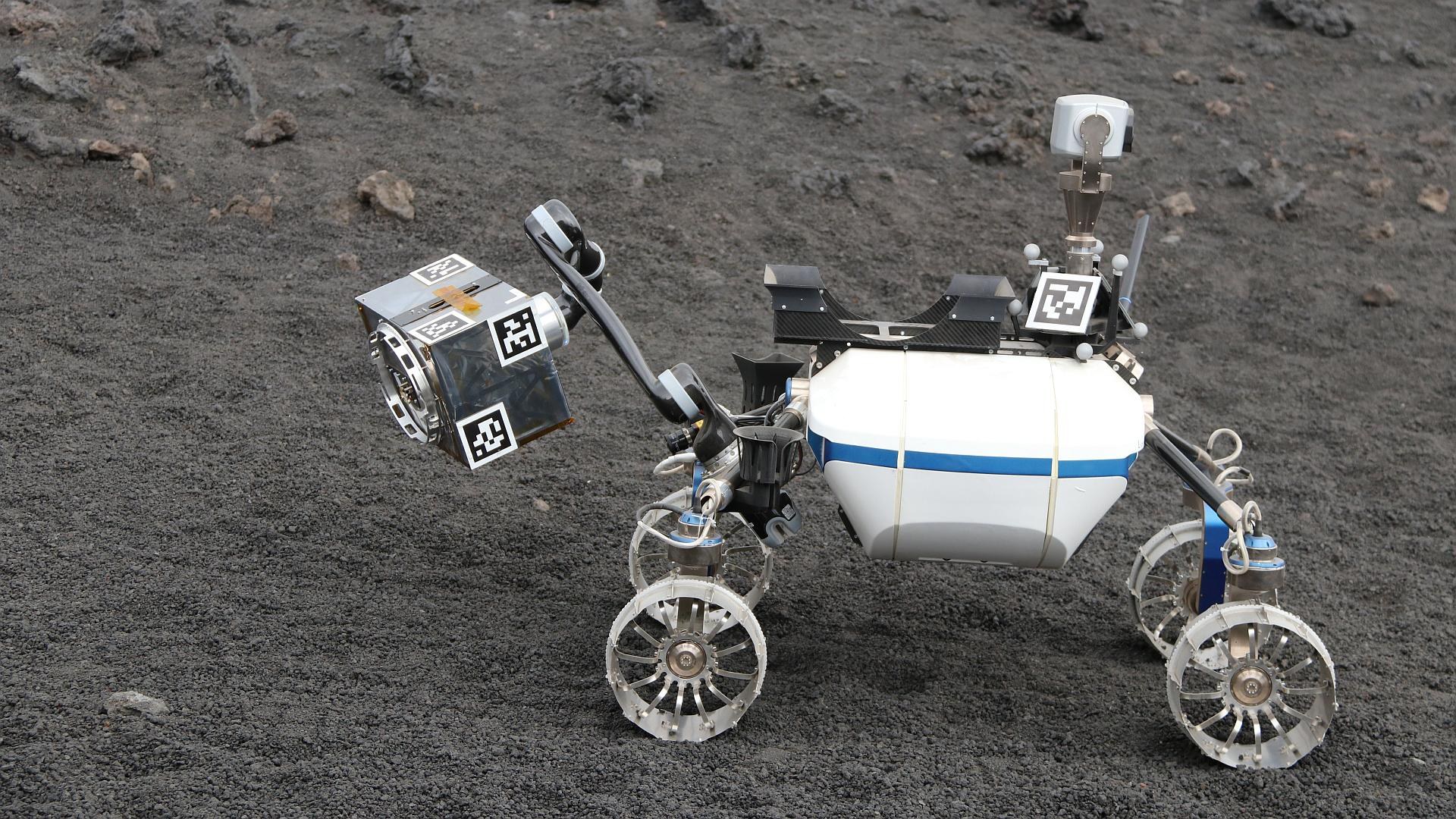
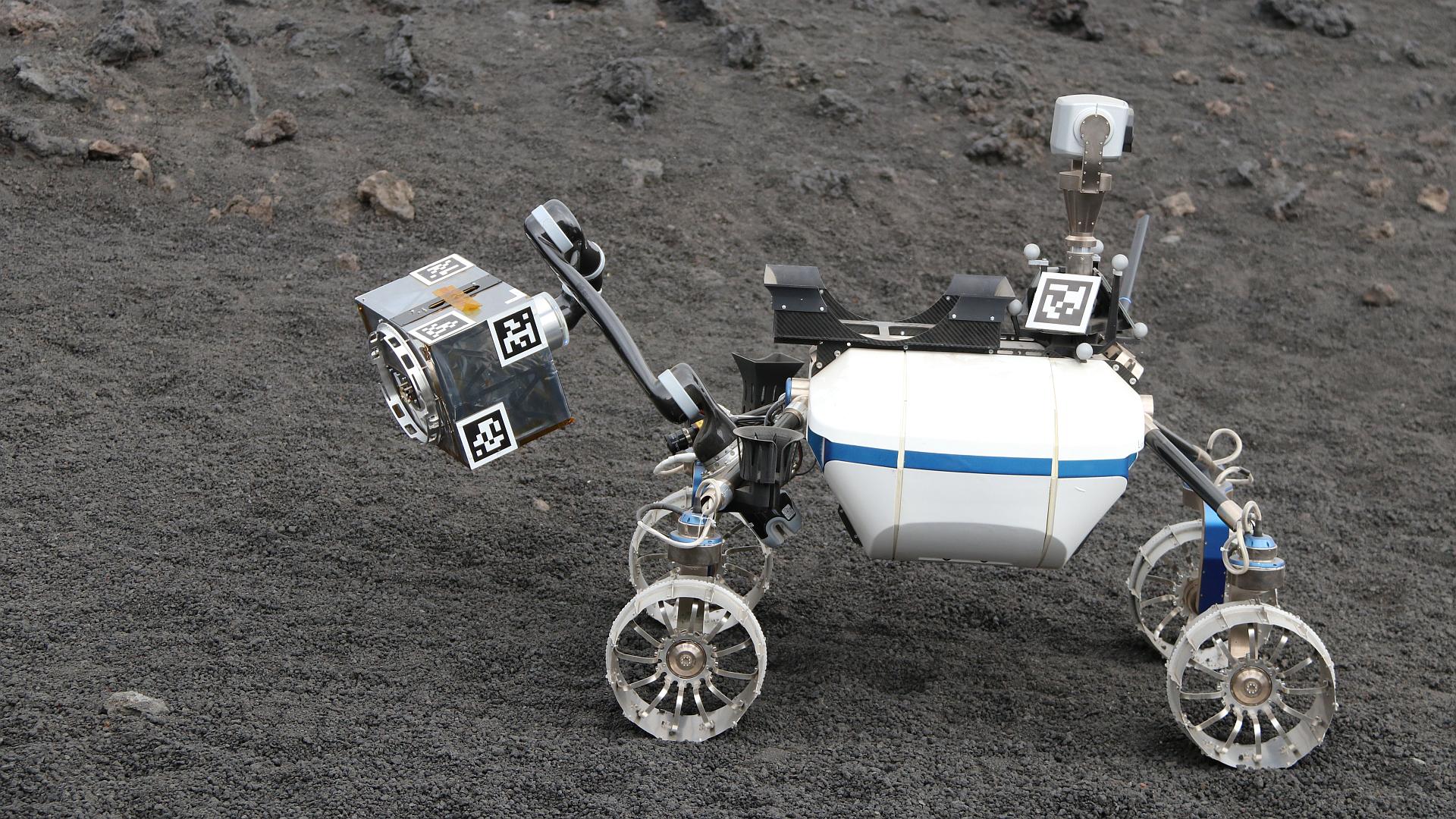
Rover LRU-2 navigiert autonom zu der vorgegebenen Stelle, an der die Sensorbox für seismische Messungen abgelegt werden soll. Im Projekt ROBEX sollen Lander, Rover und Sensorboxen miteinander kommunizieren und autonom die Exploration eines fremden Himmelskörpers durchführen.
{kind=link}