Robot Command Terminal: Steuerungsgerät an Bord der ISS

Robot Command Terminal: Steuerungsgerät an Bord der ISS
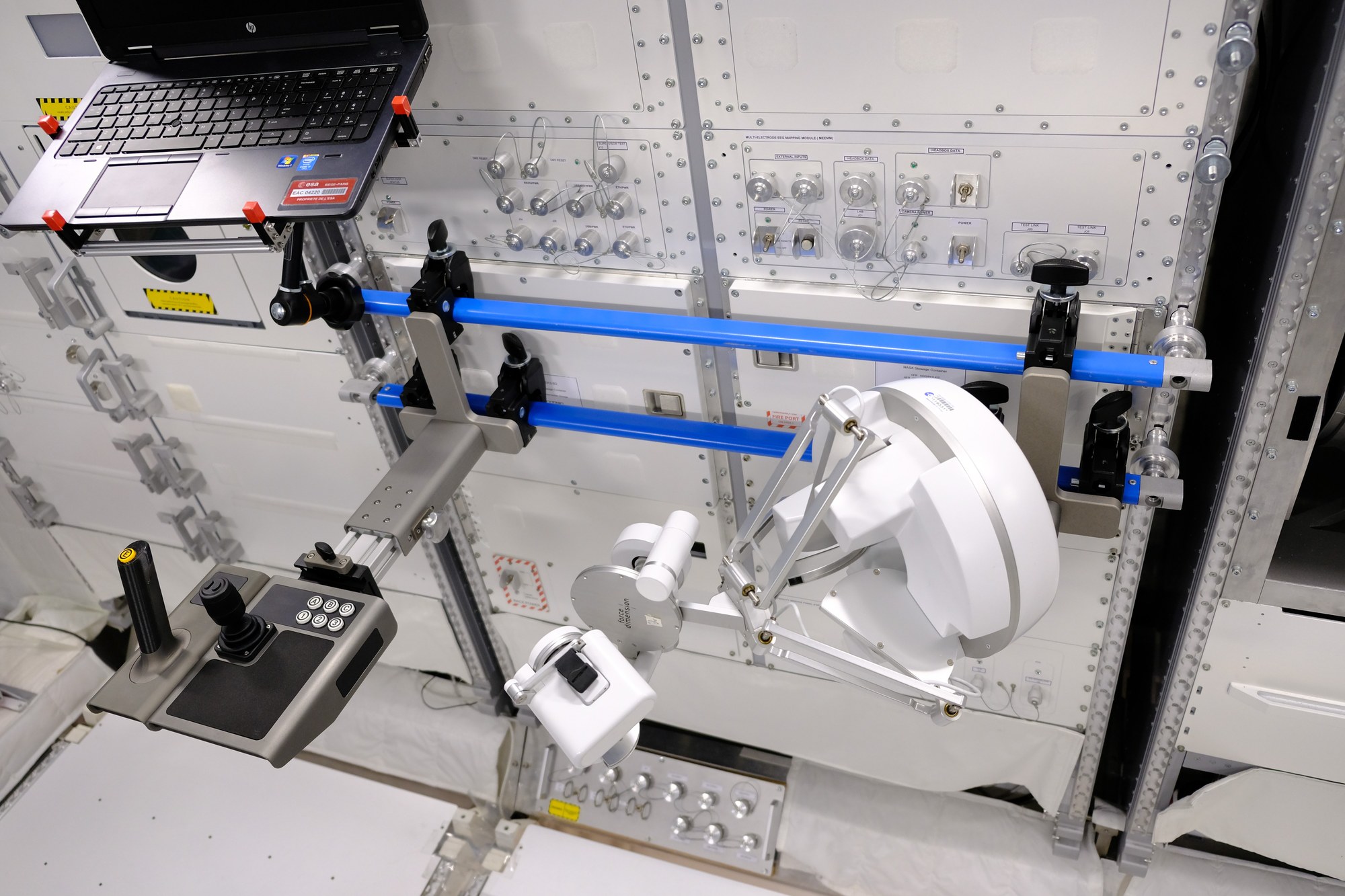
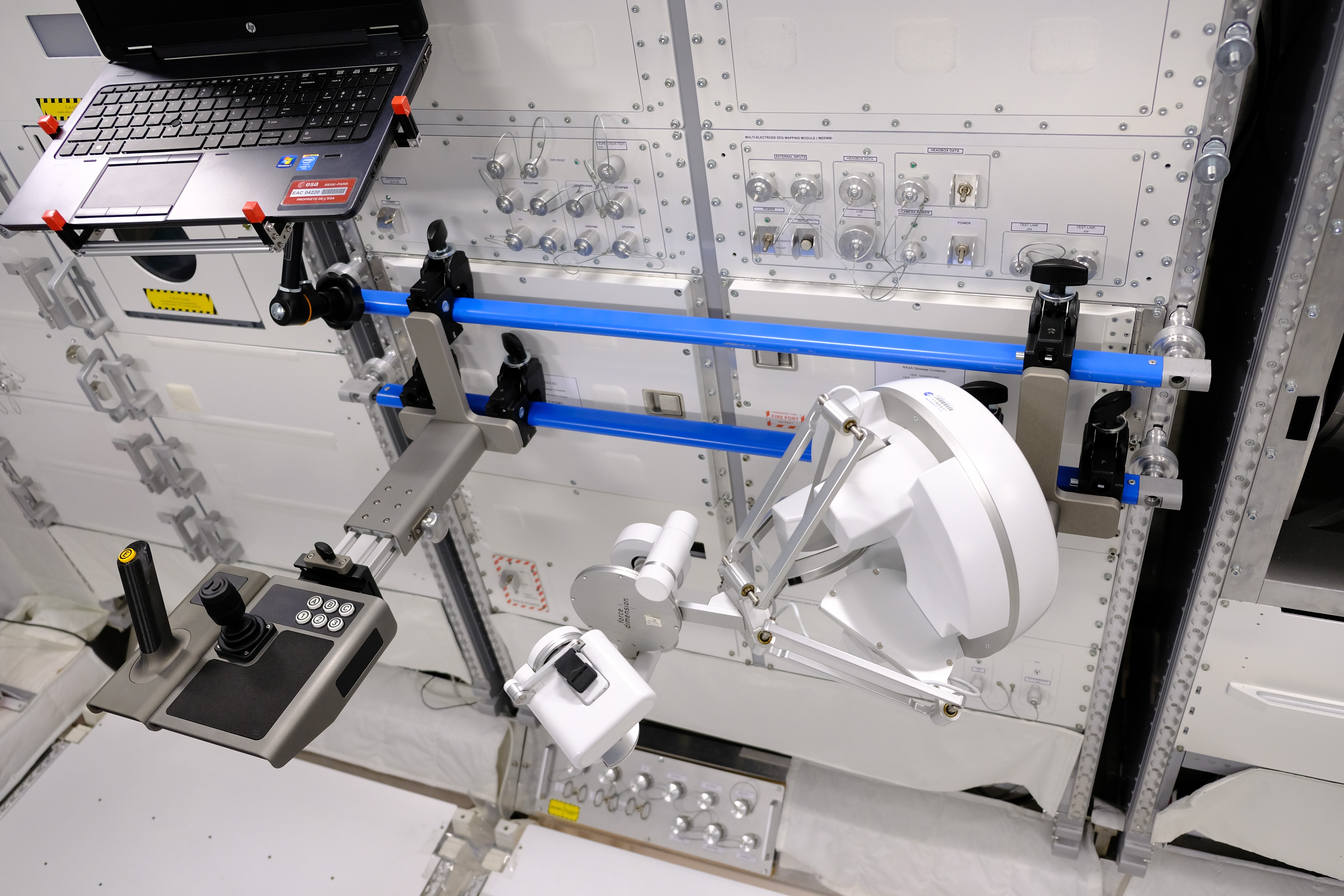
Im Columbus-Modul der Internationalen Raumstation ISS befindet sich das Robot Command Terminal für die Surface-Avatar-Experimente. Neben einem Laptop mit grafischer Benutzeroberfläche lassen sich die Roboter über zwei Eingabe-Stationen kommandieren: Über den Joystick sigma (links) kann ESA-Astronaut Marcus Wandt Kontrolle über die Bewegungs- und Blickrichtungen der verschiedenen Roboter auf intuitive Art steuern. Mit dem Interaktionsgerät (rechts) lassen sich die Arme der Roboter steuern als ob es der eigene wäre. Die Steuerung ist über sieben Freiheitsgrade geregelt, sodass sich die Bewegungen sehr natürlich anfühlen. Dank eingebauter Kraftrückkoppelung fühlt der Astronaut was der Roboter „fühlt“, indem er den entsprechenden Widerstand spürt, wenn der Roboter etwas berührt oder greift.
{kind=link}