Autonomes Baggerschiff soll Hafen von Schlick befreien
{kind=link}


{kind=link}

{kind=link}
- DLR entwickelt Konzepte für ein autonomes Baggerschiff zur Hafeninstandhaltung.
- Im September 2023 fanden mit dem DLR-Forschungsboot „Sally“ Feldtests im Hafen von Emden statt.
- Es wurden drei Automatisierungsgrade erprobt – Navigation durch die Besatzung, Fernsteuerung von Land, vollautomatisiertes Fahren.
- Schwerpunkte: Verkehr, maritime Forschung, autonome Schiffahrt, Hafeninstandhaltung
Häfen müssen eine bestimmte Mindesttiefe haben, damit Schiffe sie problemlos nutzen können. Über die Schleusen wird mit der Flut regelmäßig Schlick in den Hafen gespült, der sich am Grund absetzt. Baggerschiffe sorgen dafür, den Grund wieder von den Sedimenten zu befreien. Das Deutsche Zentrum für Luft- und Raumfahrt (DLR) forscht mit den Partnern Niedersachsen Ports und MAREVAL daran, diesen Prozess durch ein autonomes Baggerschiff umweltfreundlicher und zugleich produktiver zu gestalten. Im September 2023 fanden hierzu Feldtests im Hafen von Emden statt.
Der abgesetzte Schlick wird in Emden nicht ausgebaggert, sondern im Rezirkulationsverfahren angesaugt und kurz dem Luftsauerstoff ausgesetzt. Zurück im Wasser bleiben die Sedimente dadurch in der Schwebe und die Schiffe können diese Schwebeteilchen durchfahren. Um zu verhindern, dass sich die Schlickteilchen wieder auf dem Hafengrund absetzen, ist es notwendig, dass ein Baggerschiff kontinuierlichen und systematisch alle Hafenbecken abfährt.
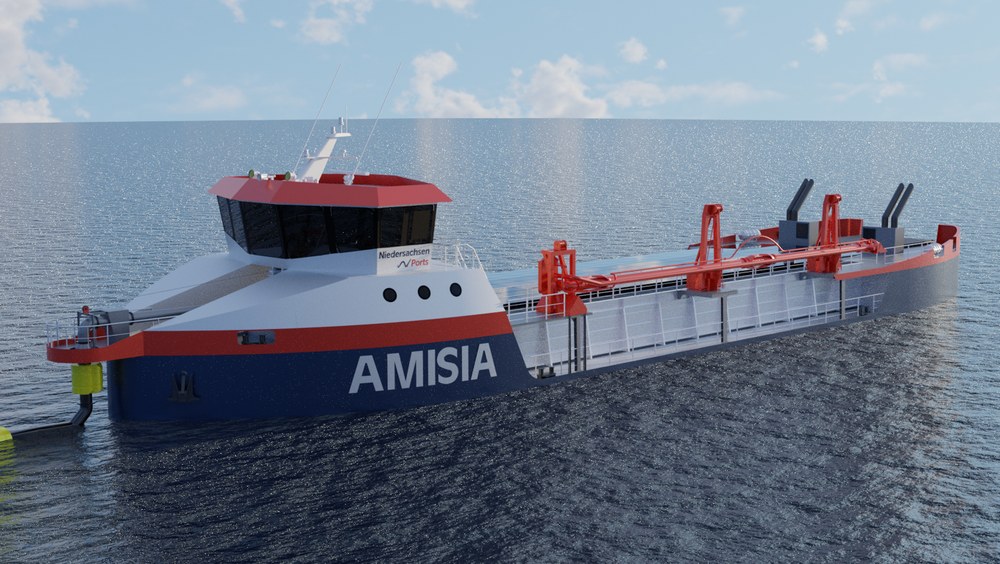
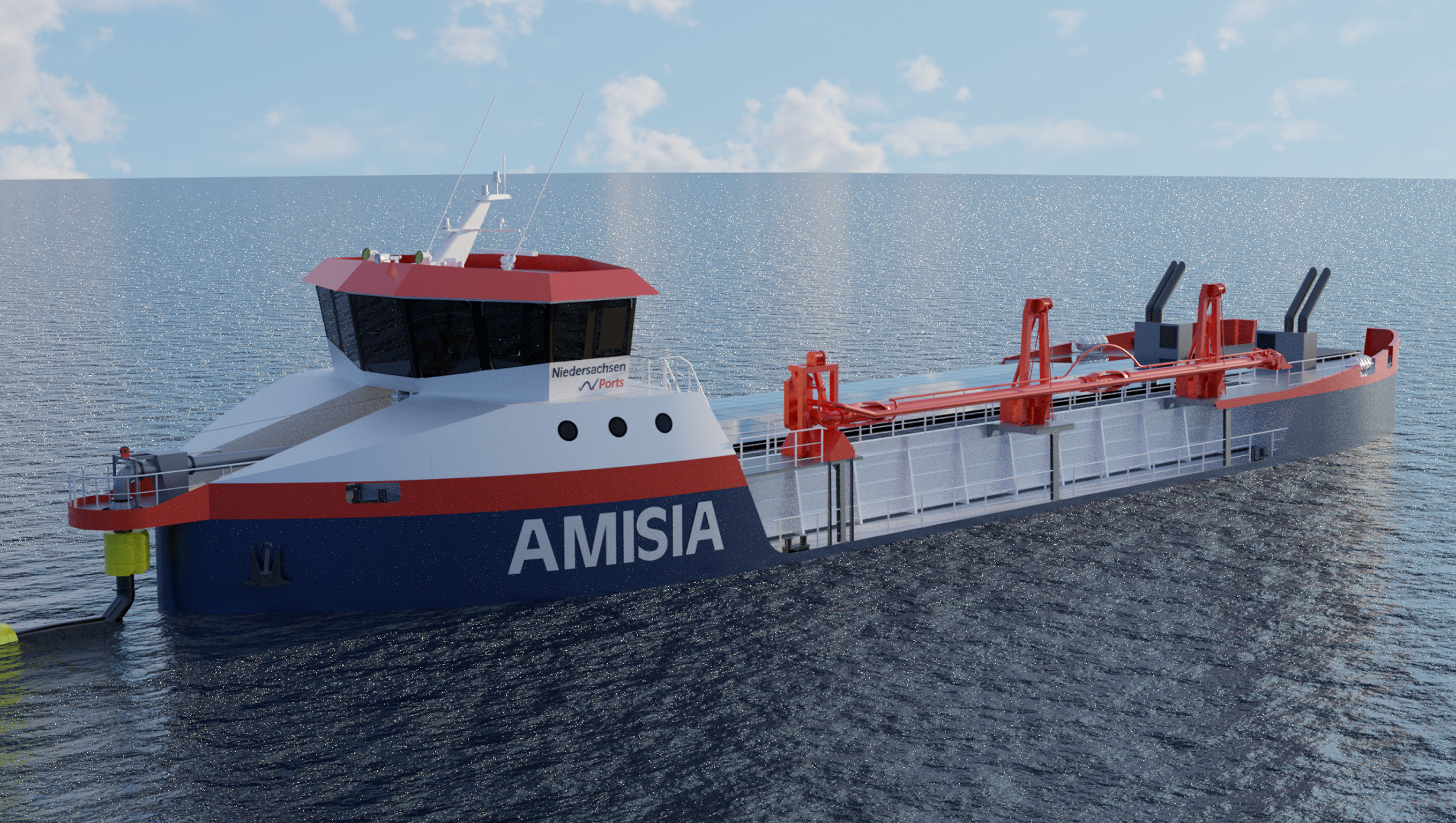
Neues Schiff und neues Betriebskonzept
Im Projekt AMISIA soll nicht nur ein autonomes Baggerschiff erforscht werden, sondern auch ein dazu passendes Betriebskonzept. AMISIA steht für „Advanced Port Maintenance: Intelligent, Sustainable, Innovative and Automated Dredging“. Für die Untersuchungen kommt das DLR-Forschungsboot „Sally“ zum Einsatz. Es ist sehr manövrierfähig, kann auf der Stelle drehen und ist rein batterie-elektrisch angetrieben.
„Das Projekt ist besonders spannend, weil es hochautomatisiertes Fahren auf dem Wasser im Regelbetrieb bisher noch so gut wie gar nicht gibt“, sagt Mirjam Bogner vom DLR-Institut für Systems Engineering für zukünftige Mobilität, die im Projekt das Testdesign und die Datenauswertung für die Feldtests verantwortet. „Eine besondere Herausforderung für das Baggerschiff besteht in der sicheren Navigation im Hafenumfeld, das sich beispielsweise durch vor Anker liegende Schiffe ständig verändert. Deshalb erforschen wir ein Sensorkonzept, welches die sichere automatisierte Navigation in diesen unwägbaren Bereichen ermöglicht. Hierzu arbeiten wir auch an einer Assistenz zur Kollisionsvermeidung mit der Hafeninfrastruktur.“
Mit Sensoren und Kameras alles im Blick
Auf Sally sind Sensoren und Kameras angebracht, die die Umgebung im Blick behalten. Fahrende Schiffe oder der Abstand zur Kaimauer können so erfasst werden. Zudem ist Sally mit allerhand Assistenzsystemen, zum Beispiel Kollisionsvermeidungssensoren, Autopiloten und Systemen zur Objekterkennung ausgestattet. Die Assistenzsysteme sollen die meisten navigatorischen Aufgaben übernehmen. Für den Test wurde Sally mit einer handelsüblichen Fernsteuerung ausgestattet. Hier wollen die Forschenden die Grenzen dieses Systems und eine zukünftige Zulassung in einem Baggerschiff erproben.
Ferngesteuert bis autonom durch den Hafen
Die Wissenschaftlerinnen und Wissenschaftler testeten in Emden drei Automatisierungsstufen. In der ersten Stufe steuerten die DLR-Mitarbeitenden das Schiff von Bord aus. In der zweiten steuerte ein Forscher das Boot aus einem zu einer Schiffsbrücke umgebauten Container fern. In der dritten Stufe sollte das Schiff dann so weit automatisiert sein, dass es selbstständig auf auftretende Probleme reagieren kann. Sally ist bereits in der Lage, automatisiert die Spur zu halten und Hindernissen auszuweichen. Aus Sicherheitsgründen werden die Hindernisse lediglich im System simuliert. In jeder Phase war noch eine Person mit an Bord, um im Problemfall jederzeit eingreifen zu können.
Die Daten aus neu installierten Radar-Sensoren und die hieraus generierten Punktewolken sollen in den nächsten Monaten genauer untersucht werden. Die Forschenden versprechen sich davon, unerwartete Hindernisse oder vorausfahrende Schiffe auch unter schwierigen Umgebungsbedingungen detektieren zu können. Die Erkenntnisse der Tests fließen in das finale Design- und Betriebskonzept eines autonomen Baggerschiffs ein. Dieses werden die Projektbeteiligten im Herbst 2024 vorstellen.
Besser für die Umwelt
Darüber hinaus sieht das Konzept von AMISIA einen alternativen Schiffsantrieb vor, um die Unterhaltung des schwimmenden Baggers in Zukunft CO2-ärmer gestalten zu können. Die Auswahl der Antriebsalternativen reicht dabei von Wasserstoff und synthetischem Methan über Methanol bis hin zu Mischlösungen aus Verbrennungsmotor und Batteriestrom – sogenannten Hybridantrieben. Aber auch vollelektrische Antriebe kommen in Betracht.
Das Volumen von AMISIA beläuft sich auf 3,23 Millionen Euro und wird zu 78 Prozent vom BMDV über das IHATEC-Förderprogramm finanziert. Projektträger ist TÜV Rheinland Consulting.