1. Juli 2022 | Abschluss für das Helmholtz-Zukunftsprojekt ARCHES
Roboter-Team übt Mond-Erkundung auf dem Ätna
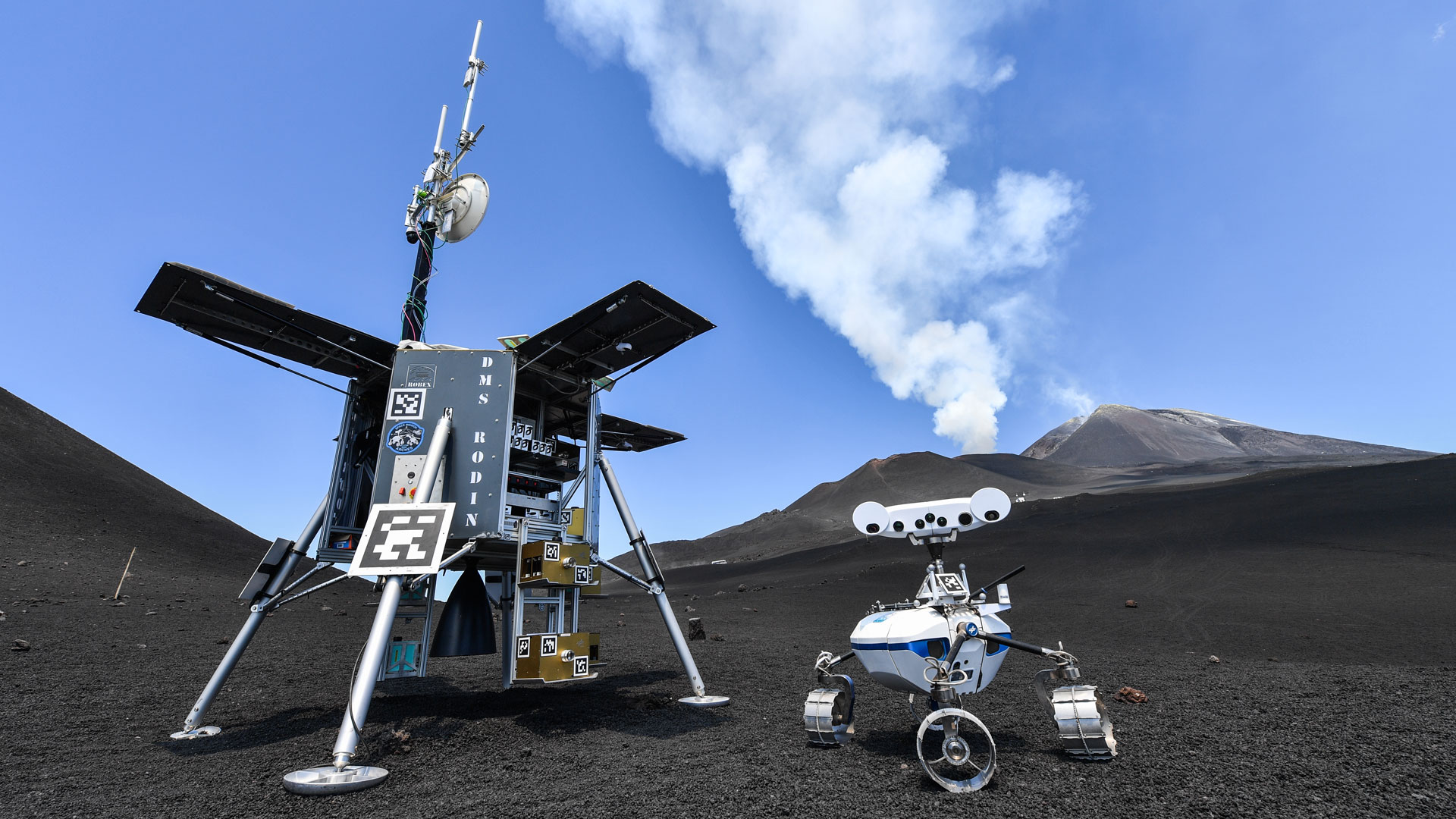
Roboter LRU1 und Lander Rodin
LRU1 (Light weight rover unit 1, rechts) bewertet Bodenproben über seine Kameras. Er ist im Team der „Wissenschaftler“. Der Lander Rodin hält unterschiedliche Materialboxen für die Roboter bereit. Am Vulkan Ätna (Sizilien, Italien) wurden drei Szenarien mit Robotern gezeigt. Die Lava-Landschaft ähnelt der Mondoberfläche.
LRU2 (Light weight rover unit 2) hat einen Greifarm mit mehreren Werkzeugen im „Gepäck“. Er kann sich zum Beispiel für eine Schaufel oder eine Greifhand entscheiden, um Bodenproben aufzunehmen. LRU2 wiegt etwa 30 kg und ist mit 4 km/h unterwegs. Er gilt im Team als „Assistent“.
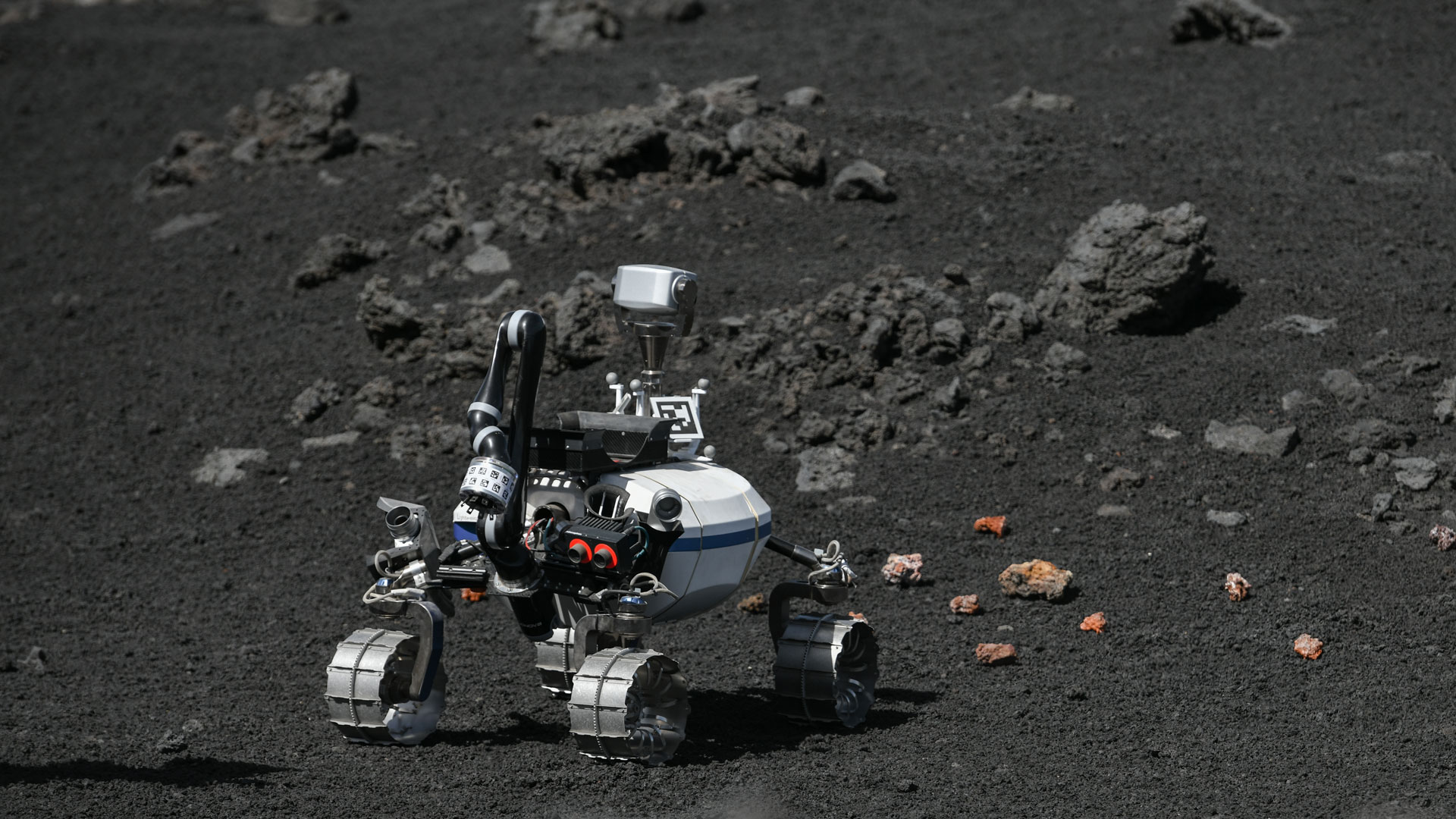
LRU1 (Light weight rover unit 1) erledigt gemeinsam mit seinen Roboter-Kollegen Aufgaben im Team. LRU ist der Prototyp eines mobilen Roboters zur Exploration in unbekanntem, unwegsamem und schwer zugänglichem Gelände. Über die Kameras wird zum Beispiel die Gegend kartiert.
Der Vulkan Ätna auf Sizilien (Italien) hat geologische Ähnlichkeit mit dem Mond: Lavalandschaften und körnige Oberfläche.
Unterschiedliche Robotersysteme arbeiten gemeinsam als verlängerter Arm des Menschen in unwirtlichen Gegenden.
Schwerpunkte: Raumfahrt, Robotik, Planetenforschung, Technologie
Roboter können in Gegenden vordringen, die für Menschen gefährlich oder unerreichbar sind. Sie können sogar fremde Planeten erkunden – oder den Mond. Das wurde jetzt am Vulkan Ätna (Italien) gezeigt: Unterschiedliche Roboter haben selbstständig Aufträge erledigt – sie haben Gesteinsproben genommen, analysiert und die Ergebnisse an einen Kontrollraum weitergeleitet. Neben dieser „Geological Mission I“ wurden zwei weitere Szenarien vorgestellt. Sie bilden den Abschluss des Helmholtz-Projekts ARCHES (Autonomous Robotic Networks to Help Modern Societies). Das Deutsche Zentrum für Luft- und Raumfahrt (DLR) leitet das Projekt. Die Lava-Landschaft am sizilianischen Vulkan Ätna ähnelt der Mondoberfläche und eignet sich deswegen gut als Testumgebung. Neben der losen, grobkörnigen Beschaffenheit sind auch die erstarrten Lava-Schichten realistische Herausforderungen für Erkundungsmissionen.
„Teams aus mobilen Robotern haben bei künftigen Weltraum-Missionen eine wichtige Rolle. In heterogenen Teams ergänzen und unterstützen sich die Roboter mit ihren unterschiedlichen Fähigkeiten. Sie dienen als verlängerter Arm und verlängertes Auge des Menschen“, erklärt Dr. Armin Wedler, Projektleiter im DLR-Institut für Robotik und Mechatronik. In der „Geological Mission I“ sah das so aus: Zwei Roboter waren gemeinsam autonom unterwegs. Dazu kommt noch eine Drohne. Roboter LRU1 (Light weight rover unit 1) bewertet Bodenproben über seine Kameras, er gilt im Team als der „Wissenschaftler“. LRU2 übernimmt die Rolle des „Assistenten“, er sammelt Bodenproben ein, bringt sie zum Lander oder analysiert sie mit LIBS (Laser Induced Breakdown Spectroscopy; Laser-induzierte Plasmaspektroskopie). Für LIBS wird ein leistungsstarker gepulster Laserstrahl auf die Probe gerichtet. Das Material verdampft teilweise und über das entstandene Plasma erkennt LIBS unterschiedliche Elemente. Das ARCHES LIBS Modul ist eine Entwicklung des DLR-Instituts für Optische Sensorsysteme. LRU2 transportiert außerdem Materialboxen, hat Platz für Werkzeug und stellt sicher, dass LRU1 immer WLAN hat. Die Drohne ARDEA gilt im Team als „Kundschafter“ und kartiert das Gelände. Wegen des zeitweise starken Windes am Ätna konnten die Fähigkeiten von ARDEA und LIBS nicht bei allen Durchläufen eingesetzt werden.
Die drei Szenarien basieren auf unterschiedlichen Rahmenbedingungen
Die „Geological Mission I“ geht davon aus, dass die Wissenschaftlerinnen und Wissenschaftler die Aufgaben der Roboter von der Erde aus überwachen. Anders ist es bei der „Geological Mission II“, die ebenfalls am Ätna gezeigt wurde. Hier werden die Roboter von einer Station im Orbit gesteuert. Neben LRU1 und LRU2 sammelt der Interact Rover Gesteinsproben und bringt sie zu einem Lander. Der Interact Rover hat einen Kameraarm und einen Greifarm, der auch ein haptisches Feedback gibt. Das heißt, er ermöglicht den weit entfernten Wissenschaftlerinnen und Wissenschaftlern ein Tastgefühl für die Gesteinsproben. Das Karlsruher Institut für Technologie (KIT) hat einen Roboterarm mit einer Hand als haptische Mensch-Maschine-Schnittstelle entwickelt. Der vierte Roboter – der Scout-Rover – ist mit einem WLAN-Repeater ausgestattet und platziert sich so, dass Interact kontinuierlich Verbindung zum Kontrollraum hat. Bei der „Geological Mission II“ arbeiten die Roboter nicht autonom, sondern werden von einer Astronautin oder einem Astronauten gelenkt.
Bei der Demomission übernahm der deutsche Astronaut Thomas Reiter diese Aufgabe in einem eigens eingerichteten Kontrollraum in Catania, der etwa 23 Kilometer entfernt war. Die „Geological Mission II“ ist gleichzeitig der Abschluss der Analog-1-Kampagne der Europäischen Weltraumorganisation ESA. 2019 hatte ESA-Astronaut Luca Parmitano im Rahmen der Analog-1-Kampagne von der Internationalen Raumstation ISS aus den Interact Rover in einer simulierten Mondumgebung in den Niederlanden gesteuert. „Wir haben sehr viele Erfahrungen gewonnen, die uns bei der Entwicklung zukünftiger Missionen helfen werden. Neben laufenden Projekten freuen wir uns sehr auf die weitere Zusammenarbeit in der Robotik, welche auf den Erkenntnissen aus ARCHES aufsetzen wird“, sagt Dr. Thomas Krüger vom Human Robot Interaction Lab der ESA.
Antenne für die Rückseite des Mondes
Im dritten Szenario „LoFar Experiment“ ging es um die Installation und Wartung eines Niederfrequenz-Funkantennenfeldes (LoFar, Low-Frequency Radio Array). Die LRU-Rover und die Drohne ARDEA haben so die Aufstellung des Antennensystems auf der Rückseite des Mondes simuliert. Eine entsprechende Antenne könnte von der Mondrückseite in die Tiefen des Weltalls gerichtet werden.
Das Helmholtz-Zukunftsprojekt ARCHES
Im Helmholtz-Zukunftsprojekt ARCHES (Autonomous Robotic Networks to Help Modern Societies) werden seit 2018 heterogene, autonome, vernetzte robotische Systeme entwickelt. Nicht nur die Roboter sind unterschiedlich, sondern auch die Anwendungsfelder. Neben der Erkundung des Sonnensystems ist zum Beispiel die Umweltüberwachung der Ozeane und die Unterstützung bei Krisen auf der Erde möglich.
Die Demo-Mission „Space“, die jetzt auf dem Ätna stattfand, musste wegen der Corona-Pandemie mehrmals verschoben werden. Eine Demo-Mission „Tiefsee“, die ebenfalls zu ARCHES gehört, wurde Ende 2020 durchgeführt.
Die Demo-Mission „Space“ wurde vom DLR gemeinsam mit dem Karlsruher Institut für Technologie (KIT) und der Europäischen Weltraumorganisation (ESA) in Catania durchgeführt. Weitere ARCHES-Projektpartner sind das Alfred-Wegener-Institut (AWI, Helmholtz-Zentrum für Polar- und Meeresforschung) und das GEOMAR Helmholtz-Zentrum für Ozeanforschung Kiel (GEOMAR). Vor fünf Jahren gab es bereits die Demomission ROBEX (Robotische Exploration unter Extrembedingungen) auf dem Ätna. ARCHES erweitert auch die Erkenntnisse, die durch ROBEX gewonnen wurden.




{kind=link}
{kind=link}
{kind=link}