Erfolgreiche „Mondlandung“ im DLR-Bewegungssimulator
7. April 2022
Erfolgreiche „Mondlandung“ im DLR-Bewegungssimulator
ESA-Astronaut Roberto Vittori im DLR-Robotic Motion Simulator
ESA-Astronaut Roberto Vittori zeigte sich vom DLR-Robotic Motion Simulator als Testing Facility begeistert. Mit Hilfe der Bewegungssimulation konnte er als Pilot realitätsnah erleben, wie sich das Raumfahrzeug in kritischen Phasen der Mondlandung verhält und steuernd eingreifen.
Für die Testreihe am DLR in Oberpfaffenhofen wurde die Kapsel des DLR-Robotic Motion Simulator zur Mondlandefähre umgebaut. Die Manöver der Mondlandefähre konnten auf einer großen Leinwand mitverfolgt werden – hier absolviert ESA-Astronaut und Pilot Roberto Vittori in der Steuerkapsel gerade eine sichere Landung.
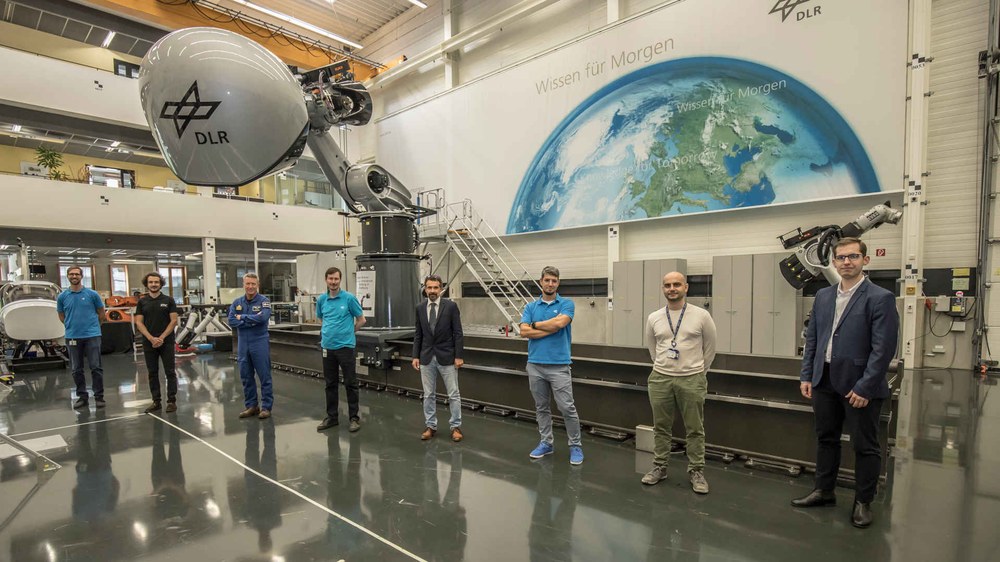
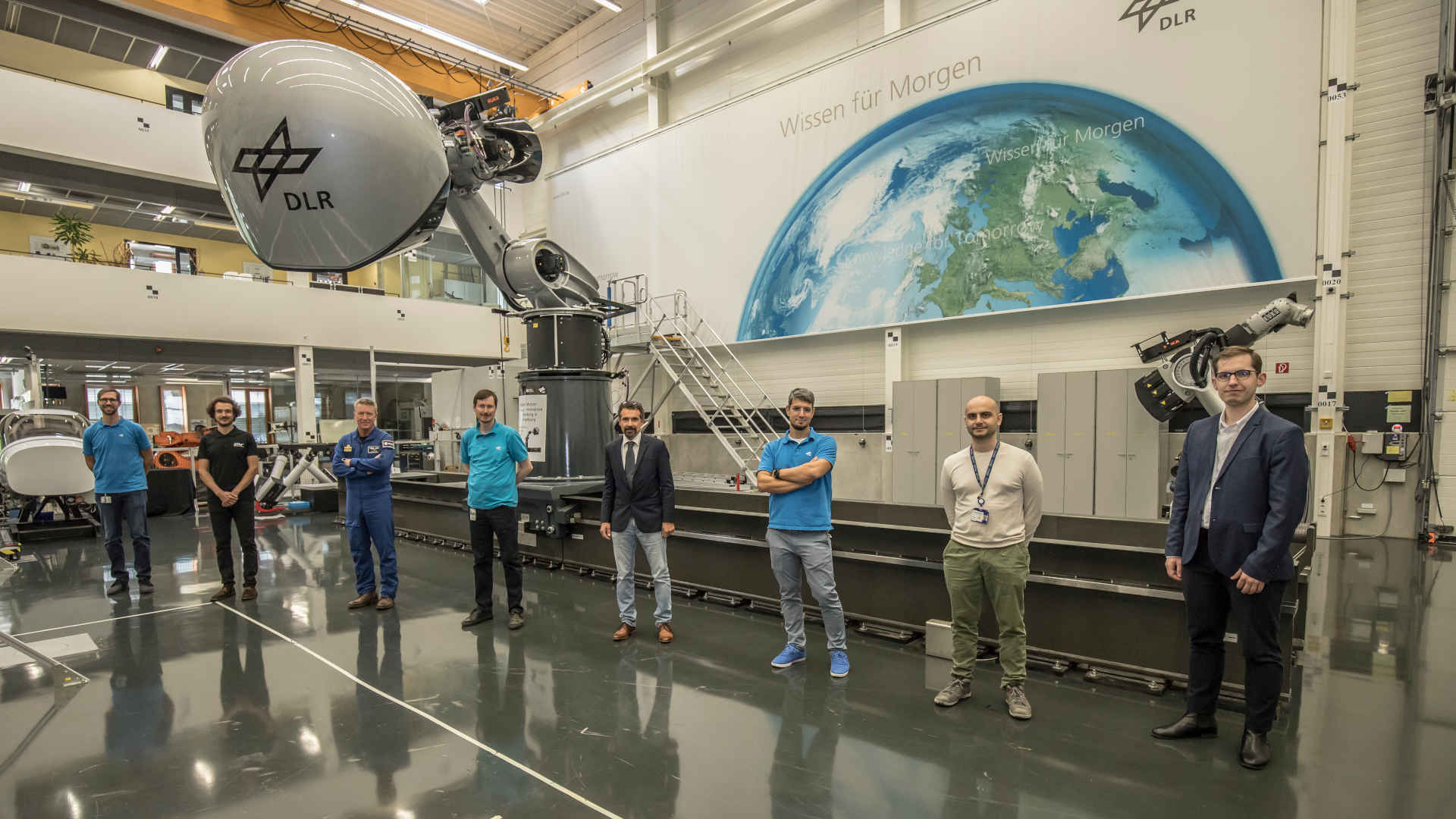
Projektteam nach erfolgreichem Experiment am DLR Oberpfaffenhofen
Der DLR-Robotic Motion Simulator wird im Techlab des DLR-Instituts für Systemdynamik und Regelungstechnik in Oberpfaffenhofen betrieben. Im Bild, die am Experiment beteiligten Projektpartner (v.l.n.r.): Andreas Seefried (DLR), Vincenzo Pesce (GMV), Roberto Vittori (ESA), Dr. Tobias Bellmann (DLR), Dr. Luca Ferracina, Miguel Neves (DLR), Eugenio Sorbellini (Thales Alenia Space) und Csaba Jéger (HE Space Operations BV).
ESA-Astronaut Roberto Vittori testete verschiedene Mondlandemanöver im „DLR Robotic Motion Simulator“.
Ziel ist es, Mensch-Maschine-Schnittstellen und Assistenzfunktionen für Raumfahrzeuge auszuwerten.
Der Bewegungssimulator ermöglicht extreme Neigewinkel und Manöver.
Schwerpunkte: Raumfahrt, Robotik, Exploration
Wie können Astronauten in Zukunft sicher auf dem Mond landen? Um eine erfolgreiche Mondlandung sicherzustellen, ist das reibungslose Zusammenspiel von Pilot und Raumfahrzeug unabdingbar. Das Deutsche Zentrum für Luft- und Raumfahrt (DLR) führte gemeinsam mit Partnern aus Forschung und Industrie ein besonderes Experiment dazu durch: Im Cockpit des „DLR-Robotic Motion Simulator“ testete ESA-Astronaut Roberto Vittori zum ersten Mal verschiedene Mondlandemanöver in einer vollbeweglichen Flugsimulation.
ESA-Astronaut Robert Vittori testet Manöver
Der Bewegungssimulator wurde am DLR-Institut für Systemdynamik und Regelungstechnik entwickelt und erlaubt extreme Neigewinkel und Manöver. Als Testpilot konnte der ESA-Astronaut in Oberpfaffenhofen erleben, wie sich ein Raumfahrzeug in kritischen Phasen verhält und steuernd eingreifen. Das Experiment ist Teil des ESA-Projekts „Human-In-the-Loop Flight Vehicle Engineering for Explorations Missions“. Im Rahmen des Projekts werden Technologiestudien zur astronautischen Landung auf dem Südpol des Mondes durchgeführt.
In einem Test-Szenario befanden sich Steine auf der vom Autopiloten vorgegeben Landezone. Vittori hatte dabei die Möglichkeit, innerhalb eines bestimmten Zeitfensters einzugreifen und über Touchscreens eine alternative Landestelle auszuwählen. In anderen Szenarien traten beim Autopiloten technische Störungen auf. Hier konnte der Italiener auf eine vollständig manuelle Steuerung umschalten und die Mondlandefähre beim Abstieg auf den Mondboden erfolgreich manuell steuern.
Zusammenarbeit von Mensch und Maschine
Ein primäres Ziel des ESA-Projektes ist es, Mensch-Maschine-Schnittstellen und Assistenzfunktionen für Raumfahrzeuge zu bewerten. Die Projektbeteiligten entwickelten hierfür eine Human-in-the-Loop Simulation, die es dem Astronauten ermöglicht, mit dem System des simulierten Landers zu interagieren. Um die Endphase der Mondlandung zu simulieren, bauten die DLR-Wissenschaftler den Bewegungssimulator zu einer Mondlandefähre um.
Der DLR-Robotic Motion Simulator basiert auf einem industriellen Roboterarm, an dessen Ende eine Cockpit-Gondel platziert ist. Das System ist flexibel umrüstbar und verfügt über einen besonders großen Arbeitsraum. Im Gegensatz zu klassischen beweglichen Flugsimulatoren ist es mithilfe des DLR Robotic Motion Simulators möglich, extreme Neigewinkel und Manöver zu realisieren.
„Es war ein wunderschöner Testdurchlauf“, berichtete ESA-Astronaut Roberto Vittorio und lobte das intuitive Gefühl für die Bewegungen, die ihm der Simulator vermittelte. „Der Simulator ist eine unglaubliche Maschine, wahrscheinlich eine der besten, die ich je erlebt habe. Dieses Experiment ist für mich der Beweis, dass Europa eine Schlüsselrolle in der Zukunft der Erforschung des Weltraums spielen kann.“
Im Cockpit des „DLR-Robotic Motion Simulator“ testete ESA-Astronaut Roberto Vittori zum ersten Mal verschiedene Mondlandemanöver. Der Bewegungssimulator wurde am DLR-Institut für Systemdynamik und Regelungstechnik entwickelt und ermöglicht extreme Neigewinkel und Manöver. Das Experiment ist Teil des ESA-Projekts „Human-In-the-Loop Flight Vehicle Engineering for Explorations Missions“. Im Projekt werden Technologiestudien zur astronautischen Landung auf dem Südpol des Mondes durchgeführt. Primäres Ziel ist es, Mensch-Maschine-Schnittstellen und Assistenzfunktionen für Raumfahrzeuge auszuwerten. Zudem untersuchen die DLR-Wissenschaftler/innen, wie Bewegungseinflüsse, die unter geringerer Schwerkraft auftreten, auf der Erde am besten simuliert werden können.
Successful ‘Moon landing’ using the DLR robotic motion simulator
Für die Wiedergabe dieses Videos auf Youtube.com ist Ihre Zustimmung zur Speicherung von Daten ('Cookies') erforderlich. Unter Datenschutz-Einstellungen können Sie Ihre Wahl einsehen und verändern.
Successful ‘Moon landing’ using the DLR robotic motion simulator
Im Cockpit des „DLR-Robotic Motion Simulator“ testete ESA-Astronaut Roberto Vittori zum ersten Mal verschiedene Mondlandemanöver. Der Bewegungssimulator wurde am DLR-Institut für Systemdynamik und Regelungstechnik entwickelt und ermöglicht extreme Neigewinkel und Manöver. Das Experiment ist Teil des ESA-Projekts „Human-In-the-Loop Flight Vehicle Engineering for Explorations Missions“. Im Projekt werden Technologiestudien zur astronautischen Landung auf dem Südpol des Mondes durchgeführt. Primäres Ziel ist es, Mensch-Maschine-Schnittstellen und Assistenzfunktionen für Raumfahrzeuge auszuwerten. Zudem untersuchen die DLR-Wissenschaftler/innen, wie Bewegungseinflüsse, die unter geringerer Schwerkraft auftreten, auf der Erde am besten simuliert werden können.
Für das neue Experiment stattete das DLR-Team die Gondel mit Touchscreens, neuen Eingabegeräten für den Astronauten und einem virtuellen Cockpit-Fenster aus. Zudem entwickelten die Forschenden eine hochauflösende Mondvisualisierung. So konnten die Manöver der Mondlandefähre auch von außen auf einer großen Leinwand mitverfolgt werden.
Intuitive, realitätsnahe Steuerung
Ein weiteres Ziel des ESA-Projektes besteht darin, genauer zu untersuchen, wie der Astronaut die Mondlandefähre unter dem Einfluss von Bewegungen steuern und navigieren kann. Mit den daraus resultierenden Ergebnissen werden die technischen Anforderungen für zukünftige Mondlandemissionen festgelegt. Darüber hinaus forschen die DLR-Wissenschaftler im Rahmen des Projektes daran, wie Bewegungseinflüsse, die unter geringerer Schwerkraft auftreten, auf der Erde am besten simuliert werden können.
Nach Abschluss der Experimentreihe zeigte sich der italienische ESA-Astronaut Vittori von der Anlage in Oberpfaffenhofen äußerst beindruckt und betonte, dass er durch die Bewegungssimulation intuitiv den Lander spüren und so realitätsnah die Mondfähre steuern konnte. ESA-Projektleiter Dr. Luca Ferracina bestätigte: „Das Experiment hat eindrücklich gezeigt, dass der DLR-Robotic Motion Simulator für Tests dieser Art hervorragend geeignet ist“.
Über das Projekt
Das Technical Directorate der europäischen Weltraumorganisation ESA hat das Projekt „Human-In-the-Loop Flight Vehicle Engineering for Explorations Missions” im Rahmen der geplanten Raumstation „Lunar Orbital Platform-Gateway“ (LOP-G) initiiert. Das Gateway soll unter anderem als Zwischenstation für astronautische Missionen zum Mond dienen.
Das Projekt wird von der ESA finanziert und ist eine Zusammenarbeit zwischen Forschung und Industrie. Projektpartner Thales Alenia Space aus Italien stellte die Benutzer-Schnittstellen für die Manöversteuerung bereit, insbesondere die Software der Touchscreens. Die Navigation und Flugregelung der simulierten Mondlandefähre wurde vom spanischen Unternehmen Grupo Tecnològico e Industrial GMV S. A. (GMV) entwickelt und an den DLR-Simulator angepasst. Der Robotic Motion Simulator ist eine Entwicklung des DLR-Instituts für Systemdynamik und Regelungstechnik.
Kontakt
Bernadette Jung
Presseredaktion
Deutsches Zentrum für Luft- und Raumfahrt (DLR)
Kommunikation
Münchener Straße 20, 82234 Weßling
Tel: +49 8153 28-2251
Dr.-Ing. Tobias Bellmann
Deutsches Zentrum für Luft- und Raumfahrt (DLR)
Institut für Systemdynamik und Regelungstechnik
Raumfahrt-Systemdynamik
Münchener Straße 20, 82234 Weßing
Miguel Neves
Deutsches Zentrum für Luft- und Raumfahrt (DLR)
Institut für Systemdynamik und Regelungstechnik
Raumfahrt-Systemdynamik
Münchener Straße 20, 82234 Oberpfaffenhofen-Weßling



{kind=link}
{kind=link}
{kind=link}
