Astronaut Scott Tingle steuert DLR-Roboter Justin aus dem All


{kind=link}
{kind=link}
- Testlauf am DLR Oberpfaffenhofen: Künstliche Intelligenz für die Zusammenarbeit von Roboter und Astronaut.
- Experiment mit anspruchsvolleren Aufgaben für das Mensch-Maschine-Team als Vorbereitung für planetare Missionen.
- Schwerpunkt(e): Raumfahrt, Künstliche Intelligenz, Robotik, bemannte Raumfahrt
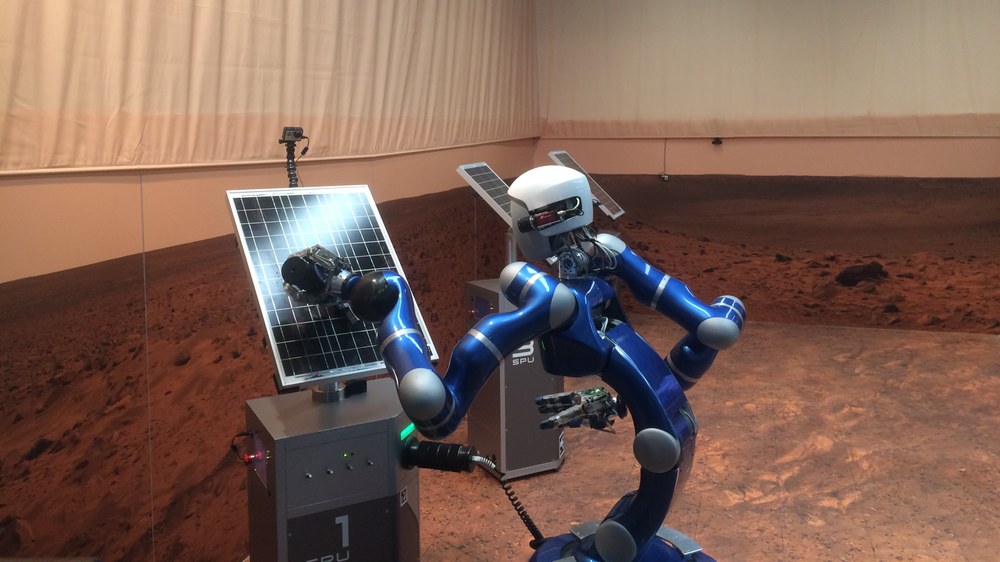
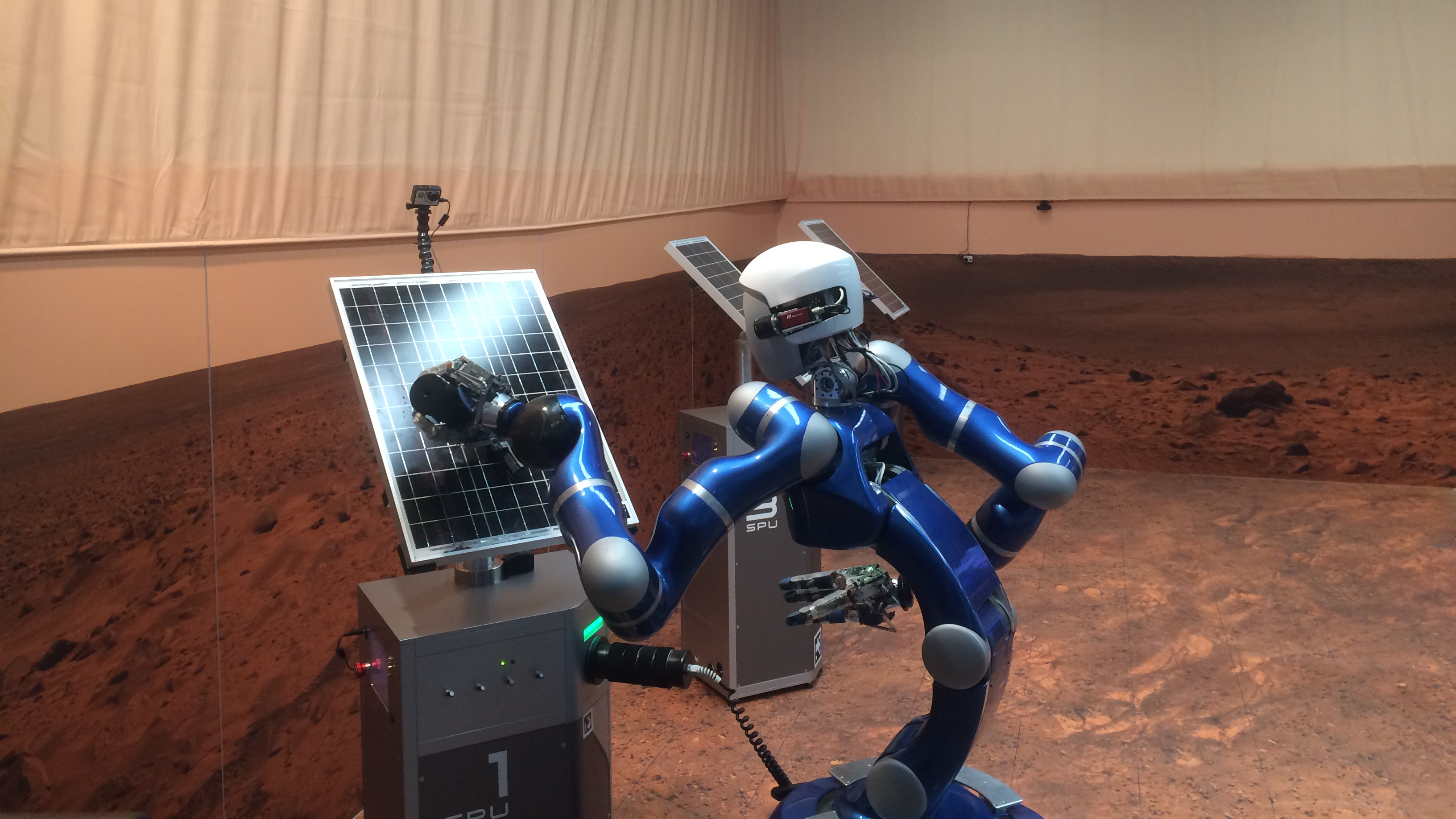
Der Chef fliegt in 400 Kilometern Höhe um die Erde, der Helfer arbeitet am Boden - beim Experiment "SUPVIS Justin" führen Befehlsempfänger und Befehlsgeber eine Fernbeziehung: Am 2. März 2018 wählte der amerikanische Astronaut Scott Tingle an Bord der Internationalen Raumstation ISS auf einem Tablet die gewünschten Kommandos aus, und Roboter Justin des Deutschen Zentrums für Luft- und Raumfahrt (DLR) führte im irdischen Labor in Oberpfaffenhofen - wie verlangt - die notwendigen Arbeiten an einer Solaranlage aus. Dafür hatten die Ingenieure des DLR-Instituts für Robotik und Mechatronik ihrem Roboter die notwendige künstliche Intelligenz beigebracht, damit dieser Teilaufgaben selbstständig und ohne detaillierte Befehle ausführen konnte. "Der Roboter ist smart, aber der Astronaut hat jederzeit die Kontrolle", sagt DLR-Projektleiter Dr. Neal Lii. Im August 2017 wurde das Experiment im Rahmen des METERON-Projekts (Multi-Purpose End-to-End Robotic Operation Network) gemeinsam mit der europäischen Raumfahrtorganisation ESA zum ersten Mal erfolgreich durchgeführt, nun wurden im zweiten Testlauf die Aufgaben für Roboter und Astronaut anspruchsvoller.
Roboter mit künstlicher Intelligenz
Für das Experiment wurde Roboter Justin als Mitarbeiter zumindest optisch auf den Mars versetzt, um dort möglichst selbstständig - Aufgabe für Aufgabe - Solarpaneele zu inspizieren, zu warten und seinem Astronauten im Orbit immer wieder Rückmeldungen für die nächsten Arbeitsschritte zu geben. "Die künstliche Intelligenz lässt den Roboter viele Aufgaben eigenständig abarbeiten - dadurch sind wir unabhängiger von Kommunikationsverzögerungen, die eine kontinuierliche Steuerung bei so großer Entfernung erschweren würden", erläutert DLR-Ingenieur Neal Lii. "Und wir reduzieren gleichzeitig die Arbeitsbelastung des Astronauten, der Aufgaben an den Roboter übertragen kann." Dafür müssen Astronaut und Roboter allerdings reibungslos miteinander kooperieren und sich ergänzen.
Team aus Mensch und Maschine
Zunächst ließen die Wissenschaftler das Mensch-Maschine-Team einige Standardaufgaben abarbeiten, die bereits am Boden vorab trainiert wurden und auch von der ISS aus bereits mit Justin durchgeführt wurden. Doch die daran anschließenden Aufgaben gingen dann deutlich über mechanische Aufgaben hinaus: Die Solarpaneele waren - und dies wäre bei einer planetaren Mission beispielsweise auf dem Mars ein Problem, das Astronaut und Roboter lösen müssten - mit Staub bedeckt und zudem nicht optimal in Richtung Sonneneinstrahlung ausgerichtet. Bei einem Betrieb von Solaranlagen für eine Marskolonie würde dies schnell dazu führen, dass die Energieversorgung schwächer und schwächer würde.
Scott Tingle, der auf seinem Tablet mit Justins Augen auf die Arbeitsumgebung auf dem Roten Planet blickte, war schnell klar: Justin muss die Anlage reinigen und so vom Staub befreien. Und er muss die Solarkomponenten neu ausrichten. Dafür konnte er unter unterschiedlichen abstrakten Kommandos auf dem Tablet auswählen. "Unser Team hat dabei ganz genau beobachtet, wie der Astronaut diese Aufgaben löste, ohne diese Probleme vorab zu kennen und ohne die neuen Fähigkeiten des Roboters zu kennen." Auch für Roboter Justin waren die neuen Aufgaben eine Herausforderung. Statt wie beim ersten Testlauf im August 2017 lediglich mitzuteilen, ob eine Anforderung von ihm erfüllt oder nicht erfüllt wurde, musst er dieses Mal gemeinsam mit seinem Bediener "abschätzen", in welchem Umfang er beispielsweise die Reinigung der Paneele erledigt hatte. Im nächsten Experimentlauf im Sommer 2018 wird der deutsche ESA-Astronaut Alexander Gerst das Kommando über Roboter Justin übernehmen - dann werden die Aufgaben erneut etwas komplizierter als bisher, denn Justin wird dann im Auftrag des Astronauten eine Komponente auswählen und an der Solaranlage installieren müssen.
Partner des Astronauten
"Das ist ein deutlicher Schritt voran in Richtung einer bemannten planetaren Mission mit robotischer Unterstützung", betont Prof. Alin Albu-Schäffer, Leiter des DLR-Instituts für Robotik und Mechatronik. In dieser Zukunft würde ein Astronaut im Orbit um einen außerirdischen Himmelskörper fliegen - und von dort aus ein Team aus Robotern mit künstlicher Intelligenz auf der Oberfläche dieses Himmelskörpers steuern. "Damit müsste der Astronaut nicht dem Risiko einer Landung ausgesetzt werden, und wir könnten bei limitierten menschlichen Ressourcen eine größere Zahl robotischer Helfer beispielsweise für den Aufbau und die Wartung von Infrastruktur setzen." Der Roboter wäre in dieser Konstellation auch nicht mehr nur der verlängerte Arm des Astronauten: "Er wäre vielmehr sein Partner am Boden."