Vorbereitung auf die Asteroidenlandung: MASCOT-Kontrollzentrum in Kontakt zum Lander
6. Juli 2018
Vorbereitung auf die Asteroidenlandung: MASCOT-Kontrollzentrum in Kontakt zum Lander
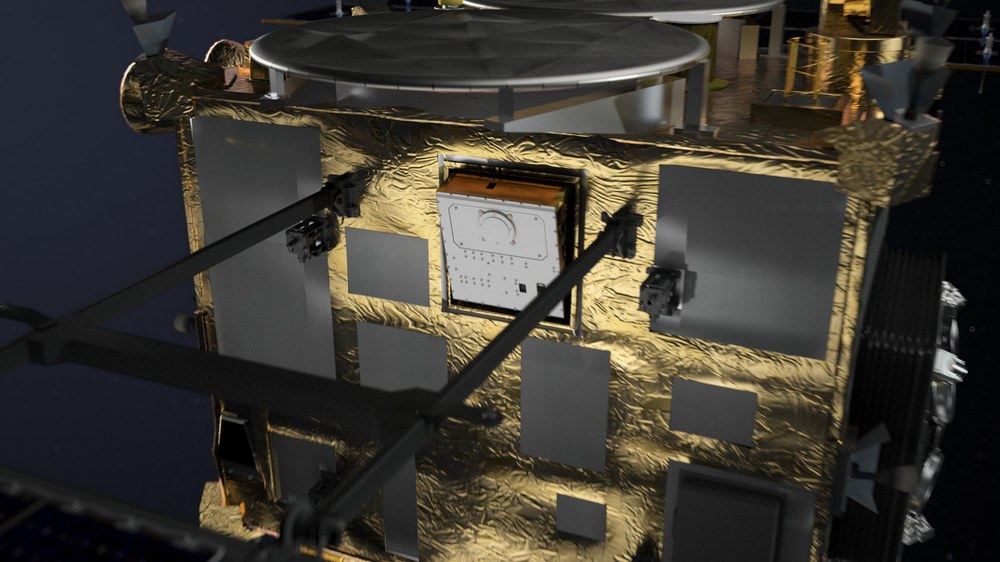
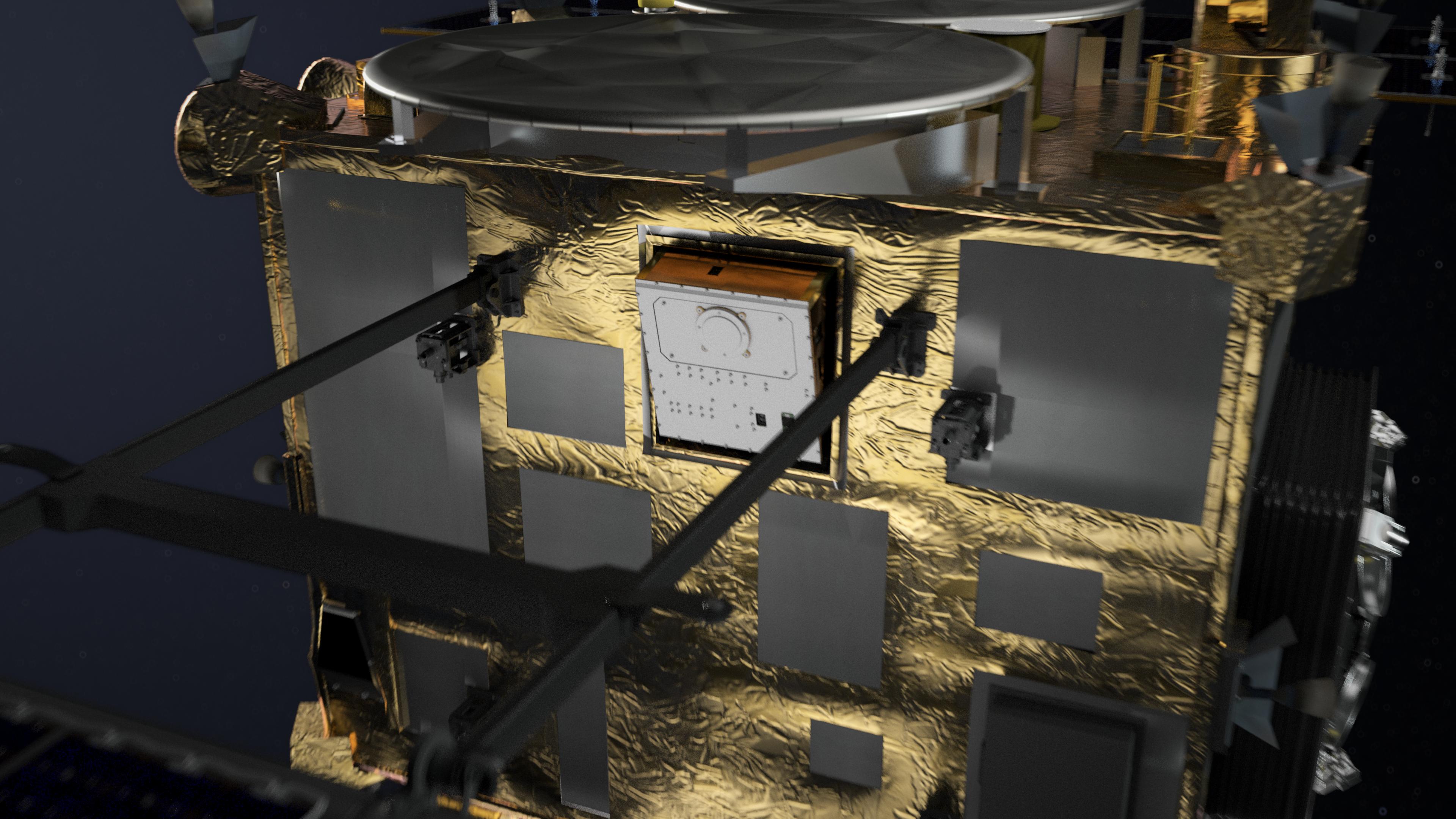
Asteroidenlander MASCOT an Bord der Raumsonde Hayabusa2
Eine 3200 Millionen Kilometer weite Reise liegt hinter der japanischen Raumsonde Hayabusa2 mit dem deutsch-französischen Lander MASCOT (Mobile Asteroid Surface Scout) an Bord.
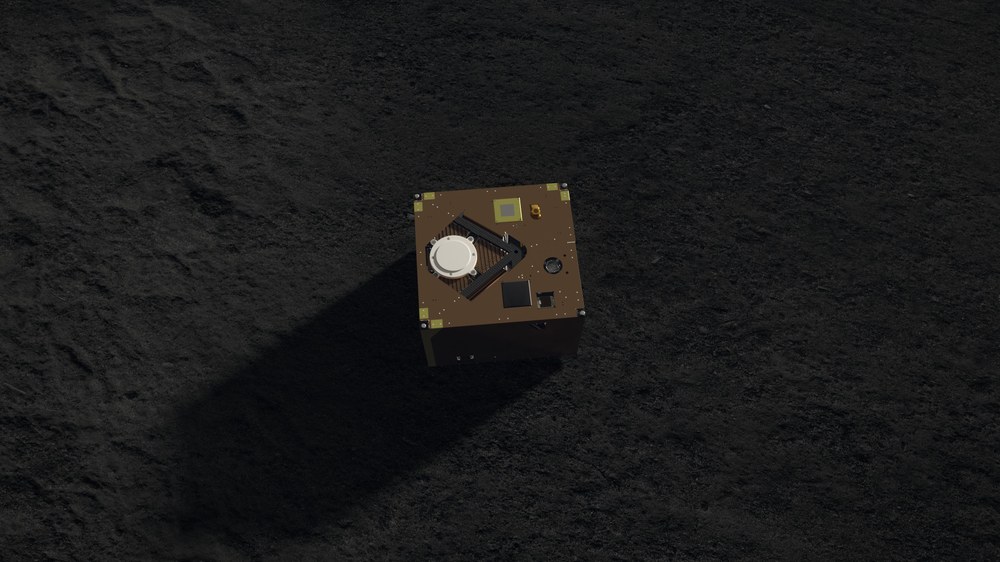
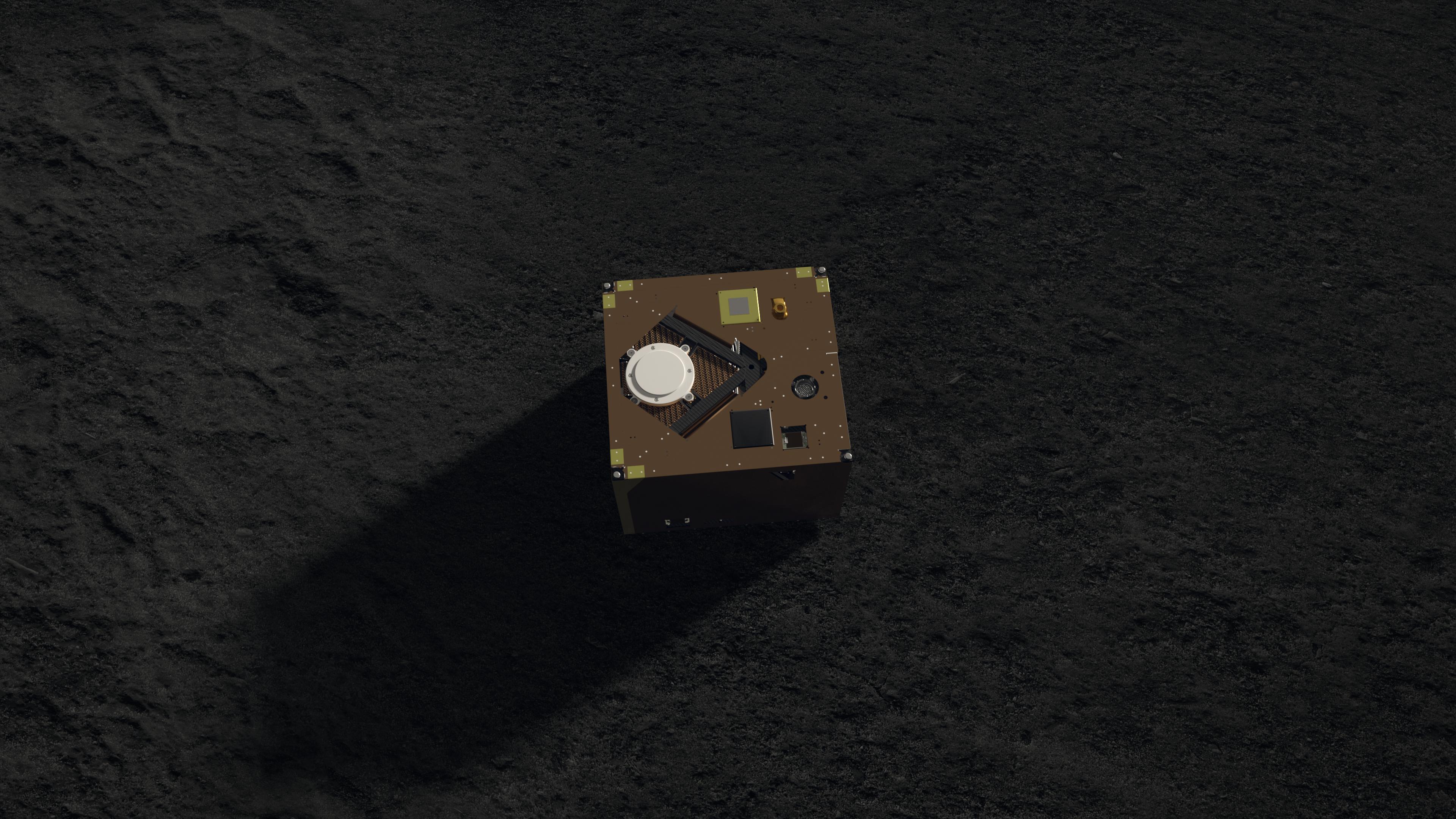
Im Inneren des 30 mal 30 mal 20 Zentimeter großen Landers MASCOT sind insgesamt vier Instrumente eingebaut: Mit einem Radiometer und einer Kamera des DLR sowie einem Spektrometer und einem Magnetometer der TU Braunschweig sollen die mineralogische und geologische Zusammensetzung der Asteroidenoberfläche untersucht und Oberflächentemperatur sowie Magnetfeld des Asteroiden ermittelt werden. Dabei erhält MASCOT durch einen eingebauten Schwungarm die nötige Bewegungsenergie für die Hüpfmanöver auf der Oberfläche.
Erste Signale des Asteroidenlanders MASCOT nach Ankunft am Asteroiden Ryugu empfangen
Landevorbereitungen treten in neue Phase
Kooperation zwischen Deutschland, Frankreich und Japan
Am 6. Juli 2018 um 3:15 Uhr MESZ war es so weit: Das Team im MASCOT-Kontrollzentrum am Deutschen Zentrum für Luft und Raumfahrt (DLR) in Köln empfing die ersten Signale des deutsch-französischen Asteroidenlanders MASCOT nach der Ankunft am Asteroiden Ryugu. Am 27. Juni 2018 hatte der Lander an Bord der japanischen Raumsonde Hayabusa2 nach einer dreieinhalb-jährigen Reise durchs All den Asteroiden erreicht. Nun überprüfen die Ingenieure und Wissenschaftler beim ersten Kontakt in diesem Jahr alle Systeme und Instrumente des Landers. "Jetzt beginnt die Zeit der intensiven Landevorbereitungen, denn bei der Landung selbst können wir nur noch begrenzt eingreifen", sagt MASCOT-Operationsmanager Christian Krause vom DLR.
MASCOT wird bei seiner Landung auf Ryugu nur zu wenigen Zeitfenstern erreichbar sein, wobei ein Kommando zum Lander und eine Antwort zurück zur Erde mehr als 30 Minuten benötigt. Während des rund 16 Stunden lang geplanten Messbetriebs auf der Oberfläche ist MASCOT somit weitestgehend auf sich allein gestellt. Den Landeübungen und -tests am Boden kommt daher eine besondere Bedeutung zu. "Wir unterziehen alle Kommandosequenzen umfangreichen Tests mit Hilfe eines Bodenmodells von MASCOT", erklärt Christian Krause vom DLR-Nutzerzentrum für Weltraumexperimente (MUSC) in Köln. "Mit dem Modell können wir beispielsweise die Systemabläufe bei Bewegung und Aufrichten erproben, ebenso testen wir die wissenschaftlichen Abläufe der Experimente an Bord." Seit dem Start von Hayabusa2 und MASCOT am 3. Dezember 2014 haben die Forscher die Zeit genutzt, um gemeinsam mit der JAXA Landesequenzen zu erproben und Instrumentkalibrierungen mit dem Bodenmodell durchzuspielen und zu verfeinern. Dabei mussten sie noch weitestgehend ohne Informationen über den Asteroiden auskommen und Annahmen etwa zur Oberflächenbeschaffenheit und -reflektivität treffen, die sie nun anpassen und verfeinern können.
Sprung ins Unbekannte
"Unser Ziel ist es, während der Landung und der Messphase möglichst viele Daten zu sammeln – dafür müssen wir die Abläufe möglichst robust auf die unwirtliche und nicht genau vorhersehbare Umgebung auf der Asteroidenoberfläche vorbereiten", sagt MASCOT-Projektleiterin Dr. Tra-Mi Ho vom DLR-Institut für Raumfahrtsysteme. Im Inneren der 30 mal 30 mal 20 Zentimeter großen Landesonde mit nur 10 Kilogramm Masse sind insgesamt vier Instrumente eingebaut: Mit einem Radiometer und einer Kamera des DLR, einem Spektrometer des Institut d'Astrophysique Spatiale und einem Magnetometer der TU Braunschweig sollen die mineralogische und geologische Zusammensetzung der Asteroidenoberfläche untersucht und Oberflächentemperatur sowie Magnetfeld des Asteroiden ermittelt werden. Dabei erhält MASCOT durch einen eingebauten Schwungarm die nötige Bewegungsenergie für Hüpfmanöver auf der Oberfläche. "Die Instrumente und Systeme durchlaufen nun nach der Ankunft erneut einen Gesundheitscheck-Up, so wie er bereits jährlich während der Reise zu Ryugu stattfand", erklärt Dr. Tra-Mi Ho.
Für Mitte August 2018 ist die Landeplatzauswahl für MASCOT gemeinsam mit den Partnern der französischen Weltraumagentur CoRoT Special und der japanischen Weltraumagentur JAXA - GLOBAL geplant. "Dann wird es für uns im MASCOT-Kontrollzentrum schon vor der für Anfang Oktober geplanten Landung sehr spannend, wenn wir die Landeprozeduren mit den letzten Details verfeinern", sagt Christian Krause. "Allerdings müssen wir - auch wenn wir den Landeplatz kennen - auf vieles vorbereitet sein, denn wie sich MASCOT nach dem ersten Aufprall auf der Oberfläche bewegt, ist nicht vorhersehbar. Es ist ein weiter Bereich denkbar, in dem MASCOT nach der ersten Berührung mit Ryugu zur Ruhe kommt." Hier nutzt das Forscherteam Flugdymamikberechnungen der französischen Kollegen der CNES, um den Aktionsradius von MASCOT möglichst genau abschätzen zu können. Dies wird auch wichtig, wenn die Forscher MASCOT wie geplant mit Hilfe eines eingebauten Schwungarms nach der ersten Messung erneut vorprogrammiert bis zu 70 Meter weit hüpfen zu lassen, um Messungen an verschiedenen Stellen auf der Asteroidenoberfläche durchzuführen.
Über die Mission Hayabusa2 und MASCOT
Hayabusa2 ist eine Weltraummission der japanischen Raumfahrtagentur JAXA (Japan Aerospace Exploration Agency) zum erdnahen Asteroiden Ryugu. Der deutsch-französische Lander MASCOT an Bord von Hayabusa2 wurde vom Deutschen Zentrum für Luft- und Raumfahrt (DLR) entwickelt und gebaut in enger Kooperation mit der französischen Raumfahrtagentur CNES (Centre National d'Etudes Spatiales). Die wissenschaftlichen Experimente an Bord von MASCOT sind Beiträge des DLR, des Institut d'Astrophysique Spatiale und der Technischen Universität Braunschweig. Betrieb und Steuerung des MASCOT-Landers und seiner Experimente erfolgen durch das DLR mit Unterstützung der CNES und in kontinuierlichem Austausch mit der JAXA.
Das DLR-Institut für Raumfahrtsysteme in Bremen entwickelte federführend zusammen mit CNES den Lander und testete ihn. Das DLR-Institut für Faserverbundleichtbau und Adaptronik in Braunschweig war für die stabile Struktur des Landers zuständig. Das DLR Robotik und Mechatronik Zentrum in Oberpfaffenhofen entwickelte den Schwungarm, der MASCOT auf dem Asteroiden hüpfen lässt, und passt dessen Bewegungen mithilfe der neuesten Messungen von Hayabusa2 an die Eigenschaften von Ryugu an. Das DLR-Institut für Planetenforschung in Berlin steuerte die Kamera MASCAM und das Radiometer MARA bei. Überwacht und betrieben wird der Asteroidenlander aus dem MASCOT-Kontrollzentrum im Nutzerzentrum für Weltraumexperimente (MUSC) am DLR-Standort Köln.


{kind=link}
{kind=link}
{kind=link}