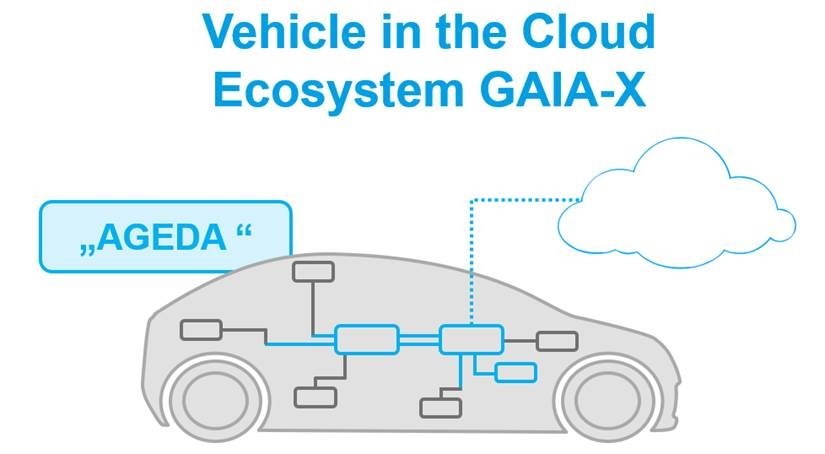
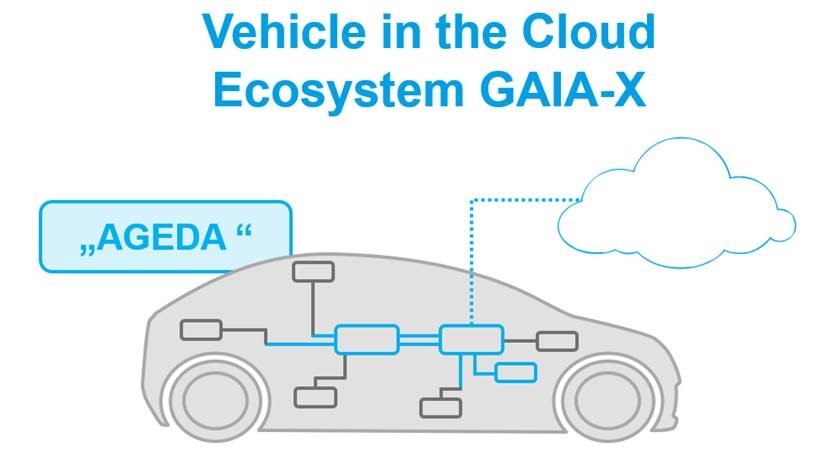
The architectures in today's vehicles are generally still based on decentralised or domain-centric architecture concepts that place a strong focus on individual control units. New applications and services, which may only be used or required temporarily, are very difficult to realise with these vehicle architectures. This is particularly true if external data sources and services are also involved, for example to realise a bidirectional exchange of information between vehicles and their infrastructure. Dynamic adaptation to new circumstances, such as the availability of new data sources or the use of specific vehicle functions by third-party applications, is almost impossible to realise. The GAIA-X 4 AGEDA project has therefore set itself the goal of developing a software architecture in the edge device vehicle that utilises the concepts of the GAIA-X initiative and enables "by-design" data-driven applications and the dynamic adaptation of a vehicle and its functions over the entire life cycle of the vehicle.
In the project, the topic of "Collective Perception" is to be realised in a total of four expansion stages:
Collective information collection: In this expansion stage, vehicle sensors can be used to collectively gather information, summarise it in a road condition map and make the data available to other users via Gaia-X services. In this expansion stage, the provision of data from the vehicle in particular will therefore have to be implemented.
Collective warning: In a further expansion stage, the collectively recorded information can not only be collated offline for later use, but can also be sent very quickly to other vehicles to warn them of danger spots. In addition to the provision of data from the vehicle, external data sources (e.g. stationary traffic infrastructure) can also be utilised in the vehicle.
Limited Remote Control: In this expansion stage, limited access to individual vehicle functions is realised in addition to the provision of information to the vehicle in order to enable active traffic control.
Remote Control: In the final full expansion stage, it is then possible to take over remote control of vehicles based on information from your own and other vehicles as well as cloud-based services. These can be optimised driving manoeuvres in special situations that cannot be solved by the automation of a vehicle alone.
Research vehicle during a test drive in the Test Bed Lower Saxony.




{kind=link}
{kind=link}