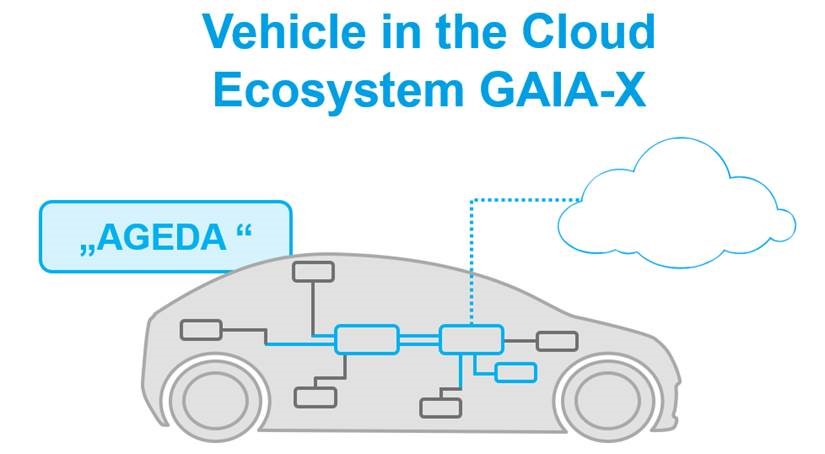
Die Architekturen in heutigen Fahrzeugen basieren in der Regel noch auf dezentralen oder domänenzentrierten Architekturkonzepten, die einen starken Fokus auf jeweils einzelne Steuergeräte legen. Neue Anwendungen und Dienste, die ggf. auch nur temporär genutzt bzw. benötigt werden, lassen sich mit diesen Fahrzeugarchitekturen nur sehr schwer realisieren. Dies gilt insbesondere dann, wenn auch externe Datenquellen und Services involviert sind, um z.B. einen bidirektionalen Austausch von Informationen zwischen Fahrzeugen und seiner Infrastruktur zu realisieren. Die dynamische Anpassung an neue Begebenheiten, wie die Verfügbarkeit neuer Datenquellen oder die Nutzung spezifischer Fahrzeugfunktionen durch Drittanbieteranwendungen, ist hier kaum bis gar nicht realisierbar. Das Projekt GAIA-X 4 AGEDA hat sich daher zum Ziel gesetzt, eine Software-Architektur im Edge-Device Fahrzeug zu entwickeln, die sich die Konzepte der GAIA-X Initiative zunutze macht und „by-design“ datengetriebene Anwendungen und die dynamische Anpassung eines Fahrzeugs mit seinen Funktionen über den gesamten Lebenszyklus des Fahrzeugs ermöglicht.
Im Projekt soll das Thema "Kollektive Perzeption" in insgesamt vier Ausbaustufen umgesetzt werden:
Kollektive Informationserfassung: In dieser Ausbaustufe können die Sensoren von Fahrzeugen genutzt werden, um kollektiv Informationen zu erfassen, diese in einer Straßenzustandskarte zusammenzufassen und die Daten über Gaia-X Dienste für andere Nutzende zu Verfügung zu stellen. In dieser Ausbaustufe wird also insbesondere die Datenbereitstellung aus dem Fahrzeug heraus umzusetzen sein.
Kollektive Warnung: In einer weiteren Ausbaustufe können die kollektiv erfassten Informationen nicht nur offline für die spätere Verwendung zusammengeführt werden, sondern auch sehr zeitnah anderen Fahrzeugen zur Warnung vor Gefahrenstellen zugespielt werden. Zusätzlich zur Datenbereitstellung aus dem Fahrzeug kommt hier noch die Nutzung externer Datenquellen (bspw. stationäre Verkehrsinfrastruktur) im Fahrzeug dazu.
Limited Remote Control: In dieser Ausbaustufe wird neben der Informationsbereitstellung ins Fahrzeug auch ein limitierter Zugriff auf einzelne Fahrzeugfunktionen realisiert, um so eine aktive Verkehrssteuerung zu ermöglichen.
Remote Control: In der letzten Vollausbaustufe ist es dann möglich, basierend auf Informationen aus dem eigenen und aus anderen Fahrzeugen sowie cloudbasierten Diensten, eine Remote-Steuerung von Fahrzeugen zu übernehmen. Dies können optimierte Fahrmanöver in besonderen Situationen sein, die rein durch die Automation eines Fahrzeugs allein nicht gelöst werden können.
Forschungsfahrzeug bei einer Testfahrt im Testfeld Niedersachsen.





{kind=link}
{kind=link}