
Aktuatorregelung

{kind=link}
Die unterste Schicht der skalierbaren Architektur der Fahrdynamikregelung bezieht sich auf die Aktuatoren. Sie umfasst die physikalische Ausführung der Steuerbefehle der übergeordneten Bewegungsschicht. Die Forschungsaktivitäten des Instituts haben sich auf Echtzeitmodellierung und Codegenerierung mithilfe von Modelica und des Functional Mockup Interface (FMI)- Standards im Rahmen von mehreren Kooperationsforschungsprojekten zusammen mit Industriepartnern (hauptsächlich Robert Bosch GmbH) konzentriert. Der Schwerpunkt lag dabei auf dem Aufbau und dem Test einer Toolkette für modellbasierte Reglerentwicklungen für eingebettete Systeme im Automobilbereich. Zusammen mit Dassault Systèmes wurden neue Technologien zur Lösung nichtlinearer inverser dynamischer Modelle und nichtlinearer Feedback-Linearisierungsregler unter Echtzeitanforderungen entwickelt. Im Rahmen des internationalen ITEA-Projekts EMPHYSIS, das durch Bosch und das Institut in die Wege geleitet wurde, entwickeln das Institut und andere Partner derzeit einen neuen eingebetteten FMI-Standard (eFMI).
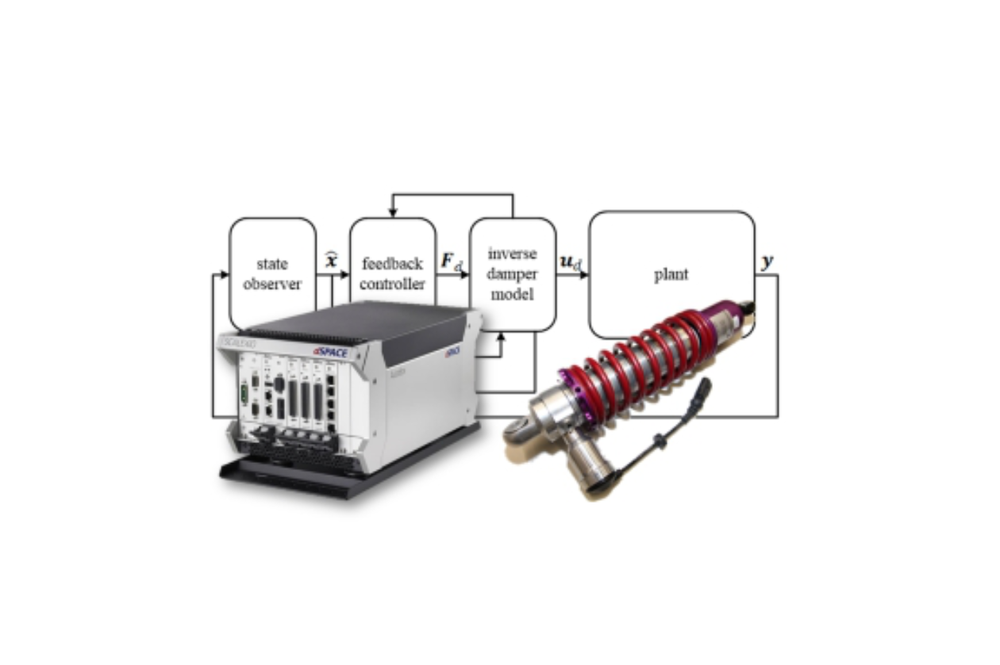
Dieser Schnittstellenstandard wird den Austausch von physikbasierten nichtlinearen Modellen zwischen Modellierungs- und Simulationsumgebungen und Softwareentwicklungsumgebungen für Steuergeräte und andere eingebettete Systeme vereinfachen. In einem Anwendungsfall des Projekts hat das Institut eine Toolkette erstellt um sowohl einen Zustandsschätzer als auch einen Regler für einen hochleistungsfähigen semi-aktiven Dämpfer auf einem Vorentwicklungssteuergerät zu implementieren. Die Toolkette, die in der Abbildung unten dargestellt ist, basiert auf Regler- und Prädiktionsmodellen in Modelica, generiertem eFMI-Code von Dymola (Algorithm Code) und TargetLink (C-Code), sowie einer institutseigenen Bibliothek von C-Funktionen für die Implementierung von nichtlinearen Kalman-Filtervarianten auf eingebetteten Systemen. Der C-Code wird in einer AUTOSAR-Umgebung konfiguriert und schließlich für die Zielplattform kompiliert.