
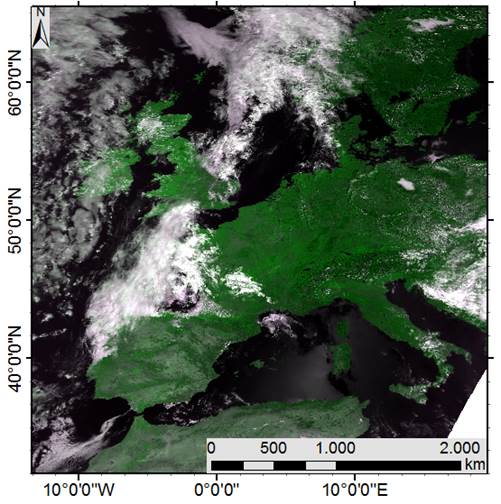
TOA Reflectance / Brightness Temperature
Der erste Prozessierungsschritt in TIMELINE erstellt aus den Rohdaten in HRTP Format Top Of Atmosphere (TOA) Reflectances und Brightness temperatures. Diese Daten sind radiometrisch korrigiert (NOAA OSPO). Durch einen nachgeschalteten Kalibrierungsvorgang werden Korrektur-Faktoren berechnet, welche von nachfolgenden wissenschaftlichen Datenprozessoren verwendet werden, um die Kalibrierung zu verbessern. Diese Faktoren werden pro Sensor täglich anhand eines 30-Tage-Fensters mit Daten des CEOS-Standorts Lybia-4 berechnet. Als Referenz für die Korrekturfaktoren wurden mittlere Werte von NOAA-19 mit NOAA OSPO Kalibration verwendet.
Die Pixel sind noch in Orbit-Geometrie, zugehörige Layer mit Längen- und Breitengraden definieren die räumliche Zuordnung, welche aufgrund von Ungenauigkeiten in der Position des Satelliten und des Orbits leider nicht immer präzise ist. Es können Lagefehler bis zu 10km pro Pixel auftreten, was für nachfolgende Mosaikierungs-Schritte, welche für die Zeitreihenanalyse benötigt werden, ungünstig ist. Um diese Fehler zu korrigieren, werden in TIMELINE zwei Prozeduren eingeschaltet, welche die Längen- und Breitengrad-Angaben verbessern. Die erste Verbesserung wird mit der TeraScan Software der Firma SeaSpace durchgeführt, in welcher die "Earth Location Parameters" iterativ verändert werden, bis die Land-Wasser – Grenzen optimal zu einem Referenzdatensatz passen. Obwohl diese Prozedur viele der Lagefehler zu beheben vermag, gibt es immer noch Szenen, welche eine verminderte Qualität in der Lage aufweisen. Daher wurde ein zusätzliches Chip-Matching-Verfahren entwickelt. Dieses Verfahren basiert auf zwei Techniken: Beide suchen die optimale Übereinstimmung zwischen kleinen Bild-Chips der Orbit-Daten mit a) einer Referenz-Wassermaske und b) einem Referenz-NDVI. Anschließend werden die Längen- und Breitengrad-Layer entsprechend aktualisiert. Dazu wird eine kubische Funktion verwendet, welche berücksichtigt, dass die Verschiebungen im Bild nicht-linear verteilt sein können. Eine detaillierte Beschreibung zu dem Chip-Matching-Verfahren findet sich in Dietz et al. (2017).

{kind=link}
Literatur-Angaben:
Dietz, A; Frey, C; Ruppert, T; Bachmann, M; Künzer, C & Dech, S (2017): Automated Improvement of Geolocation Accuracy in AVHRR Data Using a Two-Step Chip Matching Approach — A Part of the TIMELINE Preprocessor. Remote Sensing 9 (4): 303.